一种工业加工用机器人夹具的制作方法
1.本实用新型涉及机器人夹具技术领域,具体为一种工业加工用机器人夹具。
背景技术:
2.目前随着机械自动化生产进程的加快,机加工生产的一线工人逐渐被智能化机器所替代,现有的机器人不仅能够提高机加工的工作效率,且能够降低工人的安全事故的发生,而工业机器人使用时往往需要安装夹具实现夹持工作,但是现有的工业加工用机器人夹具还存在着一些不足的地方,例如;
3.现有公告号为(cn212635782u)的一种机加工用工业机器人夹具,该装置通过驱动电机的同步运动实现夹具的同步加紧与松开,并且该运动利用直线轴承可提高其精度,实现自动化,但是该装置依旧存在以下缺点:
4.该装置使用时其夹具无法自由的完成拆换工作,因此在夹持不同形状的物件时往往无法适用,此时往往需要更换整个设备,费时费力,较为不便,影响适用性。
技术实现要素:
5.本实用新型的目的在于提供一种工业加工用机器人夹具,解决了背景技术中所提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种工业加工用机器人夹具,包括夹持座和夹块;
7.所述夹持座内开设有滑槽,所述滑槽内部两侧活动安装有夹持臂,所述夹持臂右侧底部开设有t型插槽,所述夹块外侧安装有t型插块,所述t型插块插入于t型插槽内,所述夹块通过t型插块安装于夹持臂右端内侧;
8.所述夹持臂右侧内部活动插入有插杆,所述夹持臂右侧内部开设有弹簧槽,所述弹簧槽内且位于插杆上套置有弹簧,所述t型插块内开设有插孔,所述插杆底端插入于插孔内;
9.所述滑槽内活动安装有丝杆,所述丝杆旋转贯穿于夹持臂。
10.作为本实用新型的一种优选实施方式,所述丝杆内侧安装有限位块。
11.作为本实用新型的一种优选实施方式,所述夹持座左侧安装有连接件。
12.作为本实用新型的一种优选实施方式,所述夹持座顶部安装有电机,所述电机与丝杆传动连接。
13.作为本实用新型的一种优选实施方式,所述插杆外端安装有拉环。
14.与现有技术相比,本实用新型的有益效果如下:
15.本实用新型一种工业加工用机器人夹具,通过插杆向外拉动可使其位于插孔内脱落,随后通过t型插块位于t型插槽内拔出即可完成夹块的拆卸工作,而安装时只需将t型插块插入t型插槽内后松开插杆,随后插杆可通过弹簧的回弹插入于插孔内完成限位固定,该装置能够便捷高效的完成夹块的拆装工作,使其能够根据不同加工物件更换不同形状的夹
块进行夹持工作,大大提高适用性,使得设备的使用更为灵活。
附图说明
16.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
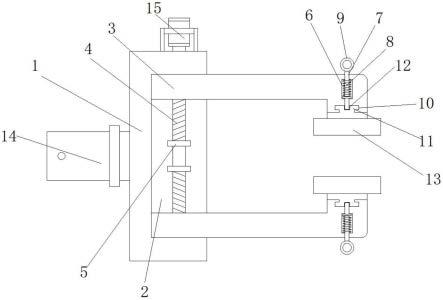
17.图1为本实用新型一种工业加工用机器人夹具的俯视剖面结构示意图。
18.图中:1、夹持座;2、滑槽;3、夹持臂;4、丝杆;5、限位块;6、弹簧槽;7、插杆;8、弹簧;9、拉环;10、t型插槽;11、t型插块;12、插孔;13、夹块;14、连接件;15、电机。
具体实施方式
19.请参阅图1,本实用新型提供一种技术方案:一种工业加工用机器人夹具,包括夹持座1和夹块13;
20.所述夹持座1内开设有滑槽2,所述滑槽2内部两侧活动安装有夹持臂3,所述夹持臂3右侧底部开设有t型插槽10,所述夹块13外侧安装有t型插块11,所述t型插块11插入于t型插槽10内,所述夹块13通过t型插块11安装于夹持臂3右端内侧;
21.所述夹持臂3右侧内部活动插入有插杆7,所述夹持臂3右侧内部开设有弹簧槽6,所述弹簧槽6内且位于插杆7上套置有弹簧8,所述t型插块11内开设有插孔12,所述插杆7底端插入于插孔12内;
22.所述滑槽2内活动安装有丝杆4,所述丝杆4旋转贯穿于夹持臂3。
23.本实施例中(请参阅图1),通过插杆7向外拉动可使其位于插孔12内脱落,随后通过t型插块11位于t型插槽10内拔出即可完成夹块13的拆卸工作,而安装时只需将t型插块11插入t型插槽10内后松开插杆7,随后插杆7可通过弹簧8的回弹插入于插孔12内完成限位固定,该装置能够便捷高效的完成夹块13的拆装工作,使其能够根据不同加工物件更换不同形状的夹块13进行夹持工作,大大提高适用性,使得设备的使用更为灵活。
24.本实施例中(请参阅图1),所述丝杆4内侧安装有限位块5,通过限位块5可对夹持臂3的移动进行限位。
25.本实施例中(请参阅图1),所述夹持座1左侧安装有连接件14,通过连接件14可便于设备与机器人机械臂的连接工作。
26.本实施例中(请参阅图1),所述夹持座1顶部安装有电机15,所述电机15与丝杆4传动连接,通过电机15即可带动丝杆4转动。
27.本实施例中(请参阅图1),所述插杆7外端安装有拉环9,通过拉环9可使插杆7的向外拉动更为省力便捷。
28.需要说明的是,本实用新型为一种工业加工用机器人夹具,包括1、夹持座;2、滑槽;3、夹持臂;4、丝杆;5、限位块;6、弹簧槽;7、插杆;8、弹簧;9、拉环;10、t型插槽;11、t型插块;12、插孔;13、夹块;14、连接件;15、电机,部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知,工作时,首先通过连接件14即可将设备与工业机器人的机械臂进行连接,而通过电机15启动可带动丝杆4位于夹持臂3所开设的螺孔内旋转,此时由于丝杆4两侧外壁螺纹相反即可时两组夹持臂3位于滑槽2内对向移动,此时夹块13对向移动即可进行夹持工作,而通过插杆7
向外拉动可使其位于插孔12内脱落,随后通过t型插块11位于t型插槽10内拔出即可完成夹块13的拆卸工作,而安装时只需将t型插块11插入t型插槽10内后松开插杆7,随后插杆7可通过弹簧8的回弹插入于插孔12内完成限位固定,该装置能够便捷高效的完成夹块13的拆装工作,使其能够根据不同加工物件更换不同形状的夹块13进行夹持工作,大大提高适用性,使得设备的使用更为灵活。
技术特征:
1.一种工业加工用机器人夹具,其特征在于,包括夹持座(1)和夹块(13);所述夹持座(1)内开设有滑槽(2),所述滑槽(2)内部两侧活动安装有夹持臂(3),所述夹持臂(3)右侧底部开设有t型插槽(10),所述夹块(13)外侧安装有t型插块(11),所述t型插块(11)插入于t型插槽(10)内,所述夹块(13)通过t型插块(11)安装于夹持臂(3)右端内侧;所述夹持臂(3)右侧内部活动插入有插杆(7),所述夹持臂(3)右侧内部开设有弹簧槽(6),所述弹簧槽(6)内且位于插杆(7)上套置有弹簧(8),所述t型插块(11)内开设有插孔(12),所述插杆(7)底端插入于插孔(12)内;所述滑槽(2)内活动安装有丝杆(4),所述丝杆(4)旋转贯穿于夹持臂(3)。2.根据权利要求1所述的一种工业加工用机器人夹具,其特征在于:所述丝杆(4)内侧安装有限位块(5)。3.根据权利要求1所述的一种工业加工用机器人夹具,其特征在于:所述夹持座(1)左侧安装有连接件(14)。4.根据权利要求1所述的一种工业加工用机器人夹具,其特征在于:所述夹持座(1)顶部安装有电机(15),所述电机(15)与丝杆(4)传动连接。5.根据权利要求1所述的一种工业加工用机器人夹具,其特征在于:所述插杆(7)外端安装有拉环(9)。
技术总结
本实用新型公开了一种工业加工用机器人夹具,包括夹持座和夹块;所述夹持座内开设有滑槽,所述滑槽内部两侧活动安装有夹持臂,所述夹持臂右侧底部开设有T型插槽,所述夹块外侧安装有T型插块,所述T型插块插入于T型插槽内,所述夹块通过T型插块安装于夹持臂右端内侧。本实用新型通过插杆向外拉动可使其位于插孔内脱落,随后通过T型插块位于T型插槽内拔出即可完成夹块的拆卸工作,而安装时只需将T型插块插入T型插槽内后松开插杆,随后插杆可通过弹簧的回弹插入于插孔内完成限位固定,该装置能够便捷高效的完成夹块的拆装工作,使其能够根据不同加工物件更换不同形状的夹块进行夹持工作,大大提高适用性,使得设备的使用更为灵活。为灵活。为灵活。
技术研发人员:王兆东
受保护的技术使用者:惠州市品焕精密五金制品有限公司
技术研发日:2022.01.18
技术公布日:2022/7/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1