一种多自由度的机器人操作手及机器人的制作方法
本技术实施例涉及机械领域,尤其涉及一种多自由度的机器人操作手及机器人。
背景技术:
1、主从遥操作机器人技术被广泛应用于危险空间的探索、大众娱乐、工业生产、医疗服务等领域。在遥操作机器人系统中,主操作手作为操作者与机器人之间的交互设备,向从端设备传递操作者给出的位姿、速度等信息,同时也可向操作者传递从端系统受到的力/力矩等环境信息,以使操作者具有操作临场感,可及时对从端系统的运动做有效的控制和干预。
2、目前应用比较广泛的机器人操作手是delta并联主操作手。delta并联主操作手通常包括动平台、静平台、以及连接在动平台和静平台之间的三条支链,其具有空间三个平动自由度以实现位置变化,并能实现力反馈。
3、然而现有的这种delta并联主操作手却无法进行姿态控制。
技术实现思路
1、本实用新型实施例提供一种多自由度的机器人操作手及具有该机器人操作手的机器人,所述机器人操作手的动平台可同时移动和转动,以实现力反馈和姿态控制,且布线简单。
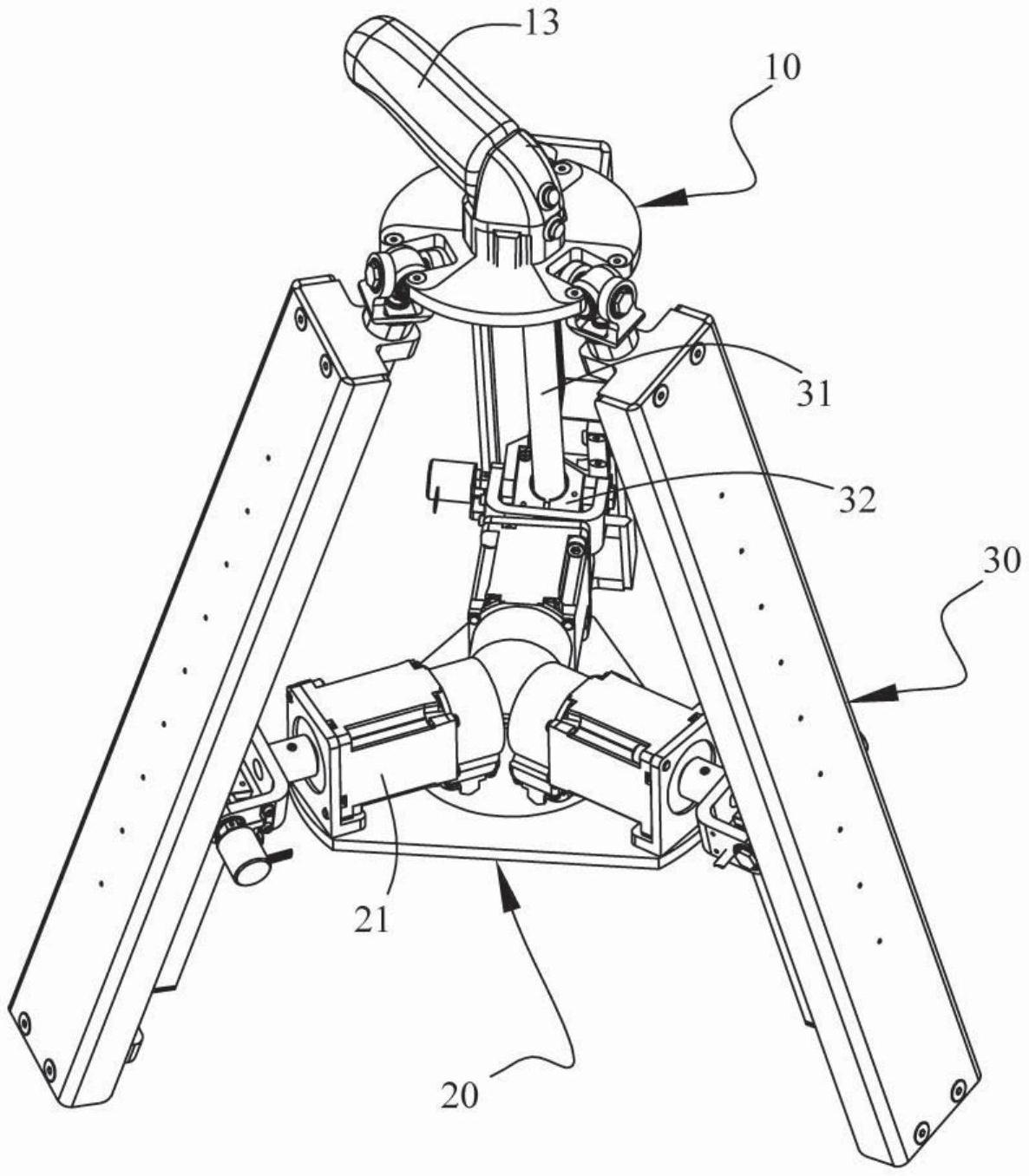
2、本实用新型实施例提供一种多自由度的机器人操作手,所述操作手包括动平台、静平台、以及转动连接于所述动平台和所述静平台之间的n条支链,其中n≥2,每一所述支链的一端与所述动平台转动连接,每一所述支链包括一直线轴,所述直线轴上套设有一直线电机,所述直线电机用于驱动相应的所述支链相对所述直线电机移动,所述静平台上固定有n个旋转电机,每一所述直线电机与所述静平台上的一相应的所述旋转电机转动连接,所述旋转电机用于驱动相应的所述支链相对所述静平台转动。本技术方案通过旋转电机驱动支链相对静平台转动,通过直线电机驱动支链平动,进而驱动与支链转动连接的动平台进行移动和/或转动,从而使得操作手能够同时实现力反馈和姿态控制,解决了现有技术中自由度较少、且无法进行姿态控制的问题。
3、值得说明的是,本文中的直线电机是指用于驱动与之连接的零部件(本文中为直线轴)进行直线运动的电机,旋转电机是指用于驱动与之连接的零部件(本文中为直线电机)进行旋转运动的电机。
4、在一种可行的方案中,每一所述直线电机分别通过一虎克铰与所述静平台上的相应的所述旋转电机转动连接。通过2自由度的虎克铰转动连接直线电机和旋转电机,不仅能实现稳定的转动,而且结构简单。
5、在一种可行的方案中,所述虎克铰包括第一旋转架、以及与所述第一旋转架连接的第一轴承组件,所述第一旋转架包括与所述旋转电机的输出轴固定连接的第一区段、以及经由所述第一轴承组件与所述直线电机转动连接的第二区段。采用轴承结构实现虎克铰,有助于降低操作手的摩擦阻力,提高机械效率。
6、在一种可行的方案中,所述操作手还包括n个编码器,每一所述编码器同轴固定在一相应的虎克铰的一所述第一轴承组件以检测所述直线电机的转动角度。通过编码器检测直线电机的转动角度,从而检测支链以及动平台的相应的例如角度位置,检测精度高,且体积小,结构简单。
7、在一种可行的方案中,每一所述支链还包括支架、固定在所述支架上的滑轨、以及与所述滑轨滑动连接的滑块,所述直线轴与所述支架连接,所述滑块与所述直线电机固定连接。通过将直线电机与滑块固定连接,而滑块又与固定在支架上的滑轨滑动连接,使得支链可更稳定地相对直线电机滑动。
8、在一种可行的方案中,每一所述支链还包括分别套设在所述直线轴两端的第一限位套和第二限位套,所述直线电机位于所述第一限位套和所述第二限位套之间。第一限位套和第二限位套的设计有助于防止支链过度移动使得直线电机脱离直线轴,为支链提供一个固定的运动行程。
9、在一种可行的方案中,每一所述支链还包括固定在所述支架上的光栅尺钢带、以及固定在所述直线电机上的光栅尺读数头,所述光栅尺读数头被配置为用于检测所述光栅尺钢带的位移。通过光栅尺检测光栅尺钢带进而检测支链的移动量,从而检测动平台的相应的例如位移信息,检测精度高,且体积小,结构简单。
10、在一种可行的方案中,每一所述支链通过一球铰与所述动平台转动连接。通过3自由度的球铰转动连接支链的一端和动平台,不仅能实现稳定的转动,而且结构简单。
11、在一种可行的方案中,所述球铰包括第二旋转架、以及与所述第二旋转架连接的第二轴承组件,所述第二旋转架包括与所述直线轴连接的第一区段、以及经由所述第二轴承组件与所述动平台转动连接的第二区段。采用轴承结构实现球铰,有助于降低操作手的摩擦阻力,提高机械效率。
12、在一种可行的方案中,所述第二轴承组件包括轴承外壳、贯穿所述轴承外壳的长支撑轴、支撑于所述轴承外壳并分别穿设在所述长支撑轴的两端的两第一轴承、支撑于所述轴承外壳并垂直于所述长支撑轴的两短支撑轴、以及支撑于所述第二旋转架的所述第二区段并分别穿设所述两短支撑轴的两第二轴承,其中所述长支撑轴与所述动平台固定连接。垂直交叉布置的球铰结构,结构简单,传动可靠,且效率高。
13、在一种可行的方案中,所述动平台包括朝向所述静平台的下表面以及背离所述静平台的上表面,所述长支撑轴固定于所述动平台的下表面。将长支撑轴固定在动平台的下表面有助于防止干涉,增大动平台的运动范围。
14、本实用新型实施例还提供一种机器人,所述机器人包括前述的机器人操作手。本实施例的机器人的有益效果如前述的操作手所述,在此不再赘述。
15、基于上述方案可知,本实用新型实施例的操作手的支链被直线电机驱动以相对直线电机移动,且支链还被旋转电机驱动以相对静平台转动,因此,与支链连接的动平台可进行移动和/或转动,以向操作者传递从端系统受到的力/力矩等环境信息,以使操作者具有操作临场感,可及时对从端系统的运动做有效的控制和干预,且布线简单。
技术特征:
1.一种多自由度的机器人操作手,其特征在于,所述操作手包括动平台、静平台、以及转动连接于所述动平台和所述静平台之间的n条支链,其中n≥2,每一所述支链的一端与所述动平台转动连接,每一所述支链包括一直线轴,所述直线轴上套设有一直线电机,所述直线电机用于驱动相应的所述支链相对所述直线电机移动,所述静平台上固定有n个旋转电机,每一所述直线电机与所述静平台上的一相应的所述旋转电机转动连接,所述旋转电机用于驱动相应的所述支链相对所述静平台转动。
2.根据权利要求1所述的机器人操作手,其特征在于,每一所述直线电机分别通过一虎克铰与所述静平台上的相应的所述旋转电机转动连接。
3.根据权利要求2所述的机器人操作手,其特征在于,所述虎克铰包括第一旋转架、以及与所述第一旋转架连接的第一轴承组件,所述第一旋转架包括与所述旋转电机的输出轴固定连接的第一区段、以及经由所述第一轴承组件与所述直线电机转动连接的第二区段。
4.根据权利要求3所述的机器人操作手,其特征在于,所述操作手还包括n个编码器,每一所述编码器同轴固定在一相应的虎克铰的一所述第一轴承组件以检测所述直线电机的转动角度。
5.根据权利要求1所述的机器人操作手,其特征在于,每一所述支链还包括支架、固定在所述支架上的滑轨、以及与所述滑轨滑动连接的滑块,所述直线轴与所述支架连接,所述滑块与所述直线电机固定连接。
6.根据权利要求5所述的机器人操作手,其特征在于,每一所述支链还包括分别套设在所述直线轴两端的第一限位套和第二限位套,所述直线电机位于所述第一限位套和所述第二限位套之间。
7.根据权利要求5所述的机器人操作手,其特征在于,每一所述支链还包括固定在所述支架上的光栅尺钢带、以及固定在所述直线电机上的光栅尺读数头,所述光栅尺读数头被配置为用于检测所述光栅尺钢带的位移。
8.根据权利要求1所述的机器人操作手,其特征在于,每一所述支链通过一球铰与所述动平台转动连接。
9.根据权利要求8所述的机器人操作手,其特征在于,所述球铰包括第二旋转架、以及与所述第二旋转架连接的第二轴承组件,所述第二旋转架包括与所述直线轴连接的第一区段、以及经由所述第二轴承组件与所述动平台转动连接的第二区段。
10.根据权利要求9所述的机器人操作手,其特征在于,所述第二轴承组件包括轴承外壳、贯穿所述轴承外壳的长支撑轴、支撑于所述轴承外壳并分别穿设在所述长支撑轴的两端的两第一轴承、支撑于所述轴承外壳并垂直于所述长支撑轴的两短支撑轴、以及支撑于所述第二旋转架的所述第二区段并分别穿设所述两短支撑轴的两第二轴承,其中所述长支撑轴与所述动平台固定连接。
11.根据权利要求10所述的机器人操作手,其特征在于,所述动平台包括朝向所述静平台的下表面以及背离所述静平台的上表面,所述长支撑轴固定于所述动平台的下表面。
12.一种机器人,其特征在于,所述机器人包括根据权利要求1至11中任一项所述的机器人操作手。
技术总结
本技术实施例公开了一种多自由度的机器人操作手及机器人。本技术的机器人操作手包括动平台、静平台、以及转动连接于所述动平台和所述静平台之间的N条支链,其中N≥2,每一所述支链的一端与所述动平台转动连接,每一所述支链包括一直线轴,所述直线轴上套设有一直线电机,所述直线电机用于驱动相应的所述支链相对所述直线电机移动,所述静平台上固定有N个旋转电机,每一所述直线电机与所述静平台上的一相应的所述旋转电机转动连接,所述旋转电机用于驱动相应的所述支链相对所述静平台转动。本技术的机器人操作手的动平台可同时移动和转动,以实现力反馈和姿态控制,且布线简单。
技术研发人员:柳建飞,万永宏,黄善灯,徐鉷
受保护的技术使用者:诺创智能医疗科技(杭州)有限公司
技术研发日:20220307
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!