一种新能源汽车电池模组下线夹爪的制作方法
1.本实用新型涉及新能源汽车电池加工设备领域,具体涉及为一种新能源汽车电池模组下线夹爪。
背景技术:
2.随着新能源领域的发展,新能源汽车的市场需求日益增加,新能源汽车采用蓄电池作为储能动力源的汽车,它利用蓄电池作为储能动力源,通过电池向电动机提供电能,驱动电动机运转,从而推动汽车行驶;
3.新能源汽车电池是一种由多个电芯组装而成,再由多个电池组合成为电池模组,单个电池体积较大,重量较重,电池组装完成后需要经过流水线搬运到储存工位,一般采用机械手搭配抓取工装进行下线搬运,因此稳定抓取电池的难度较大;
4.现有的电池下线抓取工装仅采用两侧夹爪夹取,夹取稳定性较差,定位不够精准,需多次调整夹取位置,且存在夹取局限性,无法满足大小不同的电池进行抓取,使用效率低下。
技术实现要素:
5.本实用新型的目的是:提供一种新能源汽车电池模组下线夹爪,以解决上述背景技术中提出的问题。
6.为了实现上述目的,本实用新型提供如下的技术方案:一种新能源汽车电池模组下线夹爪,包括丝杆直线滑台,所述丝杆直线滑台两端分别设有移动夹爪组件和活动夹爪组件,所述移动夹爪组件和所述活动夹爪组件结构相同,所述丝杆直线滑台下端设有卡抓板,所述丝杆直线滑台前端设有ccd定位检测相机,所述丝杆直线滑台包括底板,所述底板两侧设有直线导轨,所述底板中间设有驱动电机,所述驱动电机一端连接有丝杆,所述丝杆上设有与所述移动夹爪组件固定连接的联动板,所述移动夹爪组件包括滑动盖板,所述滑动盖板两侧设有l形卡板,两个所述l形卡板下端设有夹爪。
7.优选的,所述底板远离所述丝杆的一端设有拉压力传感器,所述拉压力传感器与所述活动夹爪组件相接触。
8.优选的,所述驱动电机通过电机固定座与所述底板固定连接,所述电机固定座后端设有多个光电开关。
9.优选的,两个所述直线导轨包括导轨,所述导轨两端均设有多个滑块,所述滑块与所述滑动盖板、所述l形卡板固定连接。
10.优选的,所述夹爪靠近所述卡抓板的一侧设有防滑垫板,所述防滑垫板下端设有与之相垂直设置的橡胶垫。
11.优选的,所述防滑垫板上设有多个卡台,多个所述卡台水平高度一致。
12.优选的,所述卡抓板两侧设有多个挡板,所述挡板下端设有倾斜面,所述卡抓板上端通过多个导向杆与所述底板固定连接。
13.优选的,所述移动夹爪组件上端设有导向条。
14.本实用新型的有益效果为:一种新能源汽车电池模组下线夹爪,采用丝杆直线滑台、移动夹爪组件、活动夹爪组件、卡抓板、ccd定位检测相机和拉压力传感器配合使用,保证电池各个端面全方位定位,实现精准定位,通过丝杆直线滑台任意调节夹取宽度,灵活性强,利用拉压力传感器监测电池重量,保证夹取稳定性。
附图说明
15.图1为本实用新型的整体结构示意图;
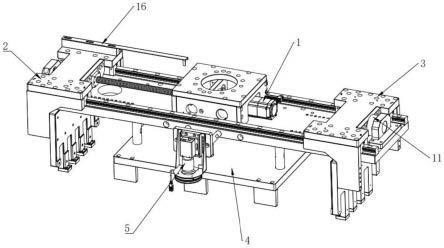
16.图2为本实用新型的另一角度整体结构示意图;
17.图3为本实用新型的丝杆直线滑台结构示意图;
18.图4为本实用新型的移动夹爪组件结构示意图。
19.图中:1-丝杆直线滑台,2-移动夹爪组件,21-滑动盖板,22-l形卡板,23-夹爪,24-防滑垫板,25-橡胶垫,26-卡台,3-活动夹爪组件,4-卡抓板,5-ccd定位检测相机,6-底板,7-直线导轨,71-导轨,72-滑块,8-驱动电机,9-丝杆,10-联动板,11-拉压力传感器,12-电机固定座,13-光电开关,14-挡板,15-导向杆,16-导向条。
具体实施方式
20.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型作进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
21.参考图1-4所示,一种新能源汽车电池模组下线夹爪,包括丝杆直线滑台1,丝杆直线滑台1两端分别设有移动夹爪组件2和活动夹爪组件3,通过直线滑台1带动移动夹爪组件2左右移动,移动夹爪组件2和活动夹爪组件3结构相同,用于夹取电池两侧,丝杆直线滑台1下端设有卡抓板4,用于电池上端面与前后端面卡紧定位,丝杆直线滑台1前端设有ccd定位检测相机5,用于拍照定位后再进行抓取,丝杆直线滑台1包括底板6,底板6两侧设有直线导轨7,底板6中间设有驱动电机8,驱动电机8一端连接有丝杆9,通过驱动电机8驱动丝杆9,使移动夹爪组件2沿直线导轨7进行左右移动,丝杆9上设有与移动夹爪组件2固定连接的联动板10,使移动夹爪组件2与丝杆9相连接,移动夹爪组件2包括滑动盖板21,滑动盖板21与直线导轨7相连接,滑动盖板21两侧设有l形卡板22,用于固定夹爪23,两个l形卡板22下端设有夹爪23。
22.底板6远离丝杆9的一端设有拉压力传感器11,拉压力传感器11与活动夹爪组件3相接触,拉压力传感器11作为夹爪23超载保护装置,防止因电池过重夹爪23夹持力不够而掉落。
23.驱动电机8通过电机固定座12与底板6固定连接,用于保护驱动电机8,电机固定座12后端设有多个光电开关13。
24.两个直线导轨7包括导轨71,导轨71两端均设有多个滑块72,滑块72与滑动盖板21、l形卡板22固定连接,保护滑动盖板21与l形卡板22沿直线导轨7作精准线性移动,防止偏移抖动,l形卡板22可根据电池大小进行反向安装,扩大夹取宽度。
25.夹爪23靠近卡抓板4的一侧设有防滑垫板24,防滑垫板24下端设有与之相垂直设
置的橡胶垫25,夹取电池时增加与电池接触面的摩擦力,保证夹取稳定。
26.防滑垫板24上设有多个卡台26,多个卡台26水平高度一致,多个卡台26精准卡入电池外壳上的凹槽内,加强夹取的定位准确性。
27.卡抓板4两侧设有多个挡板14,挡板14下端设有倾斜面,通过多个挡板14保证电池前后端面定位,卡抓板4上端通过多个导向杆15与底板6固定连接。
28.移动夹爪组件2上端设有导向条16,用于匹配光电开关13进行识别。
29.本装置上端与机械手相匹配使用,首先,通过机械手移动至电池上方,ccd定位检测相机进行定位,机械手将本装置下降后使卡抓板4与电池接触并定位,随后启动驱动电机8,通过丝杆9带动其一侧的移动夹爪组件2,向电池侧面移动,使移动夹爪组件2和活动夹爪组件3夹紧电池两端,夹爪23内侧的防滑垫板24和下端的橡胶垫25夹紧电池侧面和下端面,防滑垫板24上的卡台26与电池外壳匹配卡紧,经拉压力传感器11数值确认是否超载后,即可搬运电池。
30.上述实施例用于对本实用新型作进一步的说明,但并不将本实用新型局限于这些具体实施方式。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应理解为在本实用新型的保护范围之内。
技术特征:
1.一种新能源汽车电池模组下线夹爪,其特征在于:包括丝杆直线滑台(1),所述丝杆直线滑台(1)两端分别设有移动夹爪组件(2)和活动夹爪组件(3),所述移动夹爪组件(2)和所述活动夹爪组件(3)结构相同,所述丝杆直线滑台(1)下端设有卡抓板(4),所述丝杆直线滑台(1)前端设有ccd定位检测相机(5),所述丝杆直线滑台(1)包括底板(6),所述底板(6)两侧设有直线导轨(7),所述底板(6)中间设有驱动电机(8),所述驱动电机(8)一端连接有丝杆(9),所述丝杆(9)上设有与所述移动夹爪组件(2)固定连接的联动板(10),所述移动夹爪组件(2)包括滑动盖板(21),所述滑动盖板(21)两侧设有l形卡板(22),两个所述l形卡板(22)下端设有夹爪(23)。2.根据权利要求1所述的一种新能源汽车电池模组下线夹爪,其特征在于:所述底板(6)远离所述丝杆(9)的一端设有拉压力传感器(11),所述拉压力传感器(11)与所述活动夹爪组件(3)相接触。3.根据权利要求1所述的一种新能源汽车电池模组下线夹爪,其特征在于:所述驱动电机(8)通过电机固定座(12)与所述底板(6)固定连接,所述电机固定座(12)后端设有多个光电开关(13)。4.根据权利要求1所述的一种新能源汽车电池模组下线夹爪,其特征在于:两个所述直线导轨(7)包括导轨(71),所述导轨(71)两端均设有多个滑块(72),所述滑块(72)与所述滑动盖板(21)、所述l形卡板(22)固定连接。5.根据权利要求1所述的一种新能源汽车电池模组下线夹爪,其特征在于:所述夹爪(23)靠近所述卡抓板(4)的一侧设有防滑垫板(24),所述防滑垫板(24)下端设有与之相垂直设置的橡胶垫(25)。6.根据权利要求5所述的一种新能源汽车电池模组下线夹爪,其特征在于:所述防滑垫板(24)上设有多个卡台(26),多个所述卡台(26)水平高度一致。7.根据权利要求1所述的一种新能源汽车电池模组下线夹爪,其特征在于:所述卡抓板(4)两侧设有多个挡板(14),所述挡板(14)下端设有倾斜面,所述卡抓板(4)上端通过多个导向杆(15)与所述底板(6)固定连接。8.根据权利要求1所述的一种新能源汽车电池模组下线夹爪,其特征在于:所述移动夹爪组件(2)上端设有导向条(16)。
技术总结
本实用新型涉及一种新能源汽车电池模组下线夹爪,包括丝杆直线滑台,丝杆直线滑台两端分别设有移动夹爪组件和活动夹爪组件,丝杆直线滑台下端设有卡抓板,丝杆直线滑台前端设有CCD定位检测相机,丝杆直线滑台包括底板,底板两侧设有直线导轨,底板中间设有驱动电机,驱动电机一端设有丝杆,移动夹爪组件包括滑动盖板,滑动盖板两侧设有L形卡板,L形卡板下端设有夹爪。本实用新型的有益效果是:采用丝杆直线滑台、移动夹爪组件、活动夹爪组件、卡抓板、CCD定位检测相机和拉压力传感器配合使用,保证电池各个端面全方位定位,实现精准定位,通过丝杆直线滑台任意调节夹取宽度,灵活性强,利用拉压力传感器监测电池重量,保证夹取稳定性。稳定性。稳定性。
技术研发人员:孙士学 秦学刚 孟凡鹏
受保护的技术使用者:昆山申光智能装备科技有限公司
技术研发日:2022.07.01
技术公布日:2022/11/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1