一种基于通信电缆同步卷收的天车式喷涂机器人机械臂
1.本实用新型涉及喷涂机器人,具体是涉及一种基于通信电缆同步卷收的天车式喷涂机器人机械臂。
背景技术:
2.目前,天车式喷涂机器人机械手臂常位于z轴伸缩臂最末端节臂处,机械臂控制箱若随机械臂安装在最末端节臂,会导致该串联式机器人末端点过重造成不稳定的情况。现将控制箱固定于伸缩臂最顶端固定臂,但控制箱与机械臂的通讯电缆在伸缩臂收缩时出现长度富余的情况,富余电缆线在伴随机器人机械臂伸缩时容易产生缠绕、干涉现象,导致电缆遭到破损。
3.现有常见的电缆自动卷收装置为电机驱动实现收放,然而电动式卷收装置也会产生以下几点问题:一是用于天车式机器人通讯电缆卷收时同步卷收依靠电控实现,稳定性、安全性较差,很容易由于卷收与伸缩臂运动不同步导致电缆拉断,造成极大损失。二是利用电机提供卷收动力可靠性、安全性低,成本较高。三是传统方式卷收时受力作用在电缆上,极有可能导致电缆因自拉力过大而拉断损坏。
技术实现要素:
4.实用新型目的:针对以上缺点,本实用新型提供一种可靠性高、避免电缆缠绕干涉问题的基于通信电缆同步卷收的天车式喷涂机器人机械臂。
5.技术方案:为解决上述问题,本实用新型采用一种基于通信电缆同步卷收的天车式喷涂机器人机械臂,包括一端设置于天车上的伸缩臂、机械手、用于对机械手供电或控制的电缆、同步卷收装置,所述机械手设置于伸缩臂远离天车的另一端,所述同步卷收装置设置于伸缩臂靠近天车的一端,所述同步卷收装置包括与伸缩臂固定连接的支座、设置于支座上的转轴、卷筒、发条卷簧和钢丝绳,所述卷筒和发条卷簧固定套设于转轴上,所述发条卷簧一端与转轴固定连接,另一端与支座固定连接,所述钢丝绳一端固定连接于卷筒上,另一端与机械手固定连接,且钢丝绳缠绕在卷筒上,所述电缆通过若干卡扣定位于钢丝绳上,钢丝绳带动电缆缠绕至卷筒上。
6.进一步的,所述支座上设置导缆器,导缆器设置于卷筒下方,导缆器包括用于钢丝绳和电缆穿过的第一导缆孔,第一导缆孔直径大于卡扣直径。
7.进一步的,所述伸缩臂靠近机械手的一端设置导缆架,导缆架包括第二导缆孔,第二导缆孔用于电缆穿过,且钢丝绳固定连接于第二导缆孔内,位于第一导缆孔和第二导缆孔之间的钢丝绳平行于伸缩臂的延伸方向。
8.进一步的,所述伸缩臂靠近天车一端设置电控箱,所述电缆一端从电控箱引出,经过卷筒与钢丝绳定位,另一端连接机械手,电控箱用于对机械手进行供电及控制,所述电控箱靠近同步卷收装置。
9.进一步的,所述支座上设置两个轴承座,转轴安装于两个轴承座内,所述发条卷簧
位于两个轴承座之间。
10.有益效果:本实用新型相对于现有技术,其显著优点是由伸缩臂本身驱动,配合发条弹簧储能驱动,增强同步性能,实现伸缩臂移动距离与卷筒收放长度同步。利用钢丝代替通信电缆受力,可以避免通信电缆由于受力过大造成自身或其它部件损坏的问题。利用发条弹簧作为动力来收卷电缆,安装简单,维修成本低,相对于电动卷筒,安全性、稳定性高。采用机械结构驱动,避免使用电机,经济性好,重量低、成本低且具有更高的可靠性、安全性。保持电缆与伸缩臂的长度匹配,避免了通信电缆冗余过程的缠绕、干涉问题,延长通信电缆工作寿命,提高机器人工作效率。
附图说明
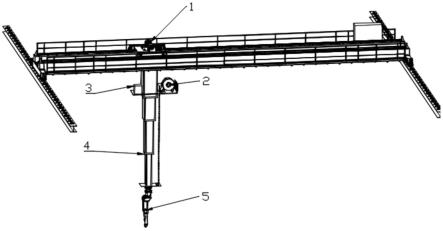
11.图1所示为本实用新型中机械臂连接在天车上的整体结构示意图;
12.图2所示为本实用新型中机械臂收缩时的结构示意图;
13.图3所示为本实用新型中同步卷收装置的结构示意图;
14.图4所示为本实用新型中钢丝绳与线缆连接的结构示意图;
15.图5所示为本实用新型中导缆器的结构示意图;
16.图6所示为本实用新型中导缆架的结构示意图。
具体实施方式
17.实施例1
18.如图1和图2所示,本实施例中的一种基于通信电缆同步卷收的天车式喷涂机器人机械臂,包括一端设置于天车1上的伸缩臂4、机械手5、用于对机械手供电或控制的电缆20、同步卷收装置2。伸缩臂4一端连接在天车1上并竖直向下延伸,下端连接机械手5,机械手5设置于伸缩臂4远离天车的另一端,同步卷收装置2和电控箱3设置于伸缩臂4上端靠近天车1,电控箱3与同步卷收装置2设置于伸缩臂4同一高度,电控箱靠近同步卷收装置2,电缆20一端从电控箱3引出,经过卷筒与钢丝绳定位,另一端连接机械手,电控箱3用于通过电缆20对机械手5进行供电及控制。
19.同步卷收装置2包括卷收装置6和收放驱动装置7,收放驱动装置7包括与伸缩臂4固定连接的支座13、设置于支座13上的转轴9、发条卷簧11、固定杆12,支座13用是承载收放驱动装置的零件,以及与伸缩臂固定节臂连接、固定,支座13上设置两个轴承座11,转轴9安装于两个轴承座内,发条卷簧11固定套设于转轴9上,且发条卷簧11位于两个轴承座之间,发条卷簧11一端与转轴9固定连接,另一端通过固定杆12与支座13固定连接,发条卷簧11为储能机构,同时为装置提供动力。发条卷簧11利用转轴与卷筒配合实现电缆20的收放。电缆20被拉出时,卷筒15带动转轴9转动使得发条卷簧11收紧,发条卷簧11储能。卷收时,发条卷簧11松弛,通过转轴带动卷筒转动,收进电缆20。利用发条卷簧11作为动力源,钢丝绳19受力实现通信电缆20同步卷收,继而推广可应用于其它电缆垂直起降的工况。
20.卷收装置6包括支架16、卷筒15和钢丝绳19,卷筒15包括卷轴和位于卷轴两端的端板14,卷筒15固定套设于转轴9上,钢丝绳19被卷筒15卷收,钢丝绳19一端固定连接于卷筒15上,另一端与导缆架8固定连接,且钢丝绳19缠绕在卷筒15上,电缆20通过若干卡扣18定位于钢丝绳19上,钢丝绳19带动电缆20缠绕至卷筒15上,钢丝绳19代替电缆20承受主要拉
力,实现电缆20伴随钢丝绳19同步收放。
21.支架16固定在支座13上,支架16上设置导缆器17,导缆器17设置于卷筒15下方,导缆器17包括用于钢丝绳19和电缆20穿过的第一导缆孔,第一导缆孔斜向下,第一导缆孔直径大于卡扣直径,引导并限制通信电缆及钢丝绳的导出方向,避免电缆20及钢丝缠19绕重叠。
22.伸缩臂4靠近机械手5的一端设置导缆架8,导缆架8包括第二导缆孔,第二导缆孔用于电缆20穿过,且钢丝绳19固定连接于第二导缆孔内,位于第一导缆孔和第二导缆孔之间的钢丝绳平行于伸缩臂4的延伸方向,导缆架8引导电缆20导出方向,避免与伸缩臂接触而缠绕磨损。本实施例中的机械臂为模块化装配,便于安装、修理、装配。
技术特征:
1.一种基于通信电缆同步卷收的天车式喷涂机器人机械臂,其特征在于,包括一端设置于天车上的伸缩臂(4)、机械手(5)、用于对机械手供电或控制的电缆(20)、同步卷收装置(2),所述机械手(5)设置于伸缩臂(4)远离天车的另一端,所述同步卷收装置(2)设置于伸缩臂(4)靠近天车的一端,所述同步卷收装置(2)包括与伸缩臂固定连接的支座(13)、设置于支座(13)上的转轴(9)、卷筒(15)、发条卷簧(11)和钢丝绳(19),所述卷筒(15)和发条卷簧(11)固定套设于转轴(9)上,所述发条卷簧(11)一端与转轴(9)固定连接,另一端与支座(13)固定连接,所述钢丝绳(19)一端固定连接于卷筒(15)上,另一端与机械手(5)固定连接,且钢丝绳(19)缠绕在卷筒(15)上,所述电缆(20)通过若干卡扣(18)定位于钢丝绳(19)上,钢丝绳(19)带动电缆(20)缠绕至卷筒(15)上。2.根据权利要求1所述的机械臂,其特征在于,所述支座(13)上设置导缆器(17),导缆器(17)设置于卷筒(15)下方,导缆器(17)包括用于钢丝绳(19)和电缆(20)穿过的第一导缆孔,第一导缆孔直径大于卡扣直径。3.根据权利要求2所述的机械臂,其特征在于,所述伸缩臂(4)靠近机械手(5)的一端设置导缆架(8),导缆架(8)包括第二导缆孔,第二导缆孔用于电缆(20)穿过,且钢丝绳(19)固定连接于第二导缆孔内,位于第一导缆孔和第二导缆孔之间的钢丝绳平行于伸缩臂(4)的延伸方向。4.根据权利要求1所述的机械臂,其特征在于,所述伸缩臂(4)靠近天车一端设置电控箱(3),所述电缆(20)一端从电控箱(3)引出,经过卷筒与钢丝绳定位,另一端连接机械手,电控箱(3)用于对机械手进行供电及控制,所述电控箱靠近同步卷收装置(2)。5.根据权利要求1所述的机械臂,其特征在于,所述支座上设置两个轴承座(10),转轴(9)安装于两个轴承座内,所述发条卷簧(11)位于两个轴承座之间。
技术总结
本实用新型公开了一种基于通信电缆同步卷收的天车式喷涂机器人机械臂,包括伸缩臂、机械手、电缆、同步卷收装置,机械手设置于伸缩臂远离天车的另一端,同步卷收装置设置于伸缩臂靠近天车的一端,同步卷收装置包括与伸缩臂固定连接的支座、设置于支座上的转轴、卷筒、发条卷簧和钢丝绳,卷筒和发条卷簧固定套设于转轴上,发条卷簧另一端与支座固定连接,钢丝绳一端固定连接于卷筒上,另一端与机械手固定连接,电缆通过若干卡扣定位于钢丝绳上,钢丝绳带动电缆缠绕至卷筒上。伸缩臂伸缩配合发条弹簧储能驱动,实现伸缩臂移动距离与卷筒收放长度同步。利用钢丝代替通信电缆受力,可以避免通信电缆由于受力过大造成自身或其它部件损坏的问题。坏的问题。坏的问题。
技术研发人员:崔杰 陶蕾 谭星林 徐唯佳 王帅 徐江敏 陈悦 夏志平
受保护的技术使用者:江苏科技大学
技术研发日:2022.07.29
技术公布日:2022/12/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1