基于红外传感器和无线视频传输的智能辅助监、巡考机器人
1.本实用新型涉及一种新兴交叉领域的监、巡考辅助设备,更具体的说,它是一种基于红外传感器和无线视频传输的智能辅助监、巡考机器人。
背景技术:
2.创造良好的考试环境是保证考试发挥应有作用有且仅有的重要研究内容。在考试的进行过程中,由于无法保证监考人员们在考前不受到各种主客观的因素影响。无法确保监考人员投入到预期,如果采用传统的摄像装置与监考人员结合,需要考虑摄像头死角、监考人员抵御长期监考时受到心理,感情,体力,耐力,精力等诸多临时因素的能力,而在监考过程中正是最需要监考人员的倾力投入,显然在监考人员已受到主客观因素影响时预期的考试环境将无法完成既定作用,容易导致对考试各类突发状况的应对不及时。
技术实现要素:
3.本实用新型针对目前无法确保监考人员对考试环境的百分百掌握的现状,提供了一种操作简便、易于使用、成本较低、性能可靠、可进行人机交互、无线传输的智能辅助监、巡考机器人。
4.本实用新型所采用的技术方案为:基于红外传感器和无线视频传输的智能辅助监、巡考机器人,其特征在于:包括机器人本体,所述机器人本体包括360摄像头、收发卷箱、轮子、红外传感器、直流电源、悬架、电机,所述360摄像头设置在机器人本体的顶部,所述收发卷箱设置在机器人本体的两侧且开口向收发卷箱的两侧外部,收发卷箱的顶部外侧连接有箱门,所述机器人本体的底部设有底盘,所述底盘包括悬架和与悬架连接的四个轮子,所述悬架上通过架承式悬挂连接有电机,所述悬架上设有直流电源,机器人本体内设有自动避障系统,所述自动避障系统的硬件包括红外传感器和灰度传感器,所述红外传感器和灰度传感器连接单片机,所述机器人本体内设有bt蓝牙通信系统,所述bt蓝牙通信系统连接单片机。
5.所述机器人包括机器人外壳和机器人车架,所述机器人外壳连接在机器人车架上,底盘与机器人外壳之间采用铝型材焊接而成。
6.所述收发卷箱包括多个塑料薄板,通过胶水粘接到机器人本体两侧。
7.所述360摄像头通过螺钉连接固定在机器人本体顶部。
8.所述机器人本体内设有播放装置,所述播放装置包括音频解码器和喇叭。
9.所述360摄像头连接单片机。
10.所述机器人本体的后侧设有与直流电源连接的充电插口。
11.本实用新型的有益效果:
12.本实用新型基于红外传感器可在考场进行自动避障,并可以通过无线视频传输向监考教师手机传送视频画面,方便监考教师对考场情况进行监控,且操作简便、易于使用、成本较低、性能可靠、可进行人机交互、无线传输,提高了考试环境的公平性。
附图说明
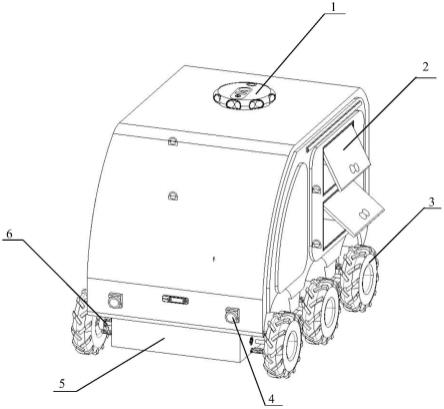
13.图1是基于红外传感器和无线视频传输的智能辅助监、巡考机器人的左轴测图;
14.图2是基于红外传感器和无线视频传输的智能辅助监、巡考机器人的右轴测图;
15.图3是基于红外传感器和无线视频传输的智能辅助监、巡考机器人中360摄像头的轴测图;
16.图4是基于红外传感器和无线视频传输的智能辅助监、巡考机器人中收发卷箱的轴测图;
17.图5是基于红外传感器和无线视频传输的智能辅助监、巡考机器人中轮子的轴测图;
18.图6是基于红外传感器和无线视频传输的智能辅助监、巡考机器人中悬架的轴测图;
19.图7是基于红外传感器和无线视频传输的智能辅助监、巡考机器人中电机的轴测图;
20.图8是基于红外传感器和无线视频传输的智能辅助监、巡考机器人中轮子、电机、单片机、红外传感器的逻辑关系图;
21.图中:1、360摄像头;2、收发卷箱;3、轮子;4、红外传感器;5、直流电源;6、悬架;7、充电插口;8、电机。
具体实施方式
22.下面结合附图对本发明作进一步的详细描述:
23.参阅图1至图7,本实用新型中基于红外传感器和无线视频传输的智能辅助监、巡考机器人包括有360摄像头1,收发卷箱2,轮子3,红外传感器4,直流电源5,悬架6,充电插口7,电机8。
24.本实用新型中单片机为arduino mega2560单片机,
25.机器人底部是由四个轮子3外加悬架6组成的底盘,悬架6和电机8通过架承式悬挂连到一起,同时直流电源5固定在底盘上,直流电源5、红外传感器4、arduino mega2560单片机和电机8连接到一起实现自动避障,底盘和机器人框架采用铝型材焊接而成。收发卷箱2体采用工程塑料加工的薄板组成,通过hy-303胶水粘接到车架上。机器人外壳采用pc+abs材料,通过卡钩连接固定在机器人车架上。360摄像头1通过螺钉连接固定在机器人外壳顶部。
26.基于红外传感器和无线视频传输的智能辅助监、巡考机器人的使用方法:
27.机器人使用arduino mega2560作为主控,4个电机带动底盘,两个直流电源5供电,2个l298n驱动板驱动电机8,采用android app作为上位机发布指令,操纵机器人运动、播放音乐等,两者通过bt蓝牙通信,同时使用2自由度云台辅助超声波传感器探测距离,躲避障碍,灰度传感器进行pid巡线、音频解码器和3w喇叭播放声音。
28.将机器人放置在考场中,机器人与监考或者巡考老师的手机相连,机器人实事传送考场的画面至老师的手机,老师通过手机可以随时监控考场的情况。在考试开始时,机器人内部存放考试的卷子,随着机器人在考场内移动,考生从收发卷箱2取到考试卷,开始答题。在考试结束后,机器人再次经过考场各个位置,考生将试卷交给机器人的收发卷箱2,完
成收卷工作。在收发卷期间,老师可以查看考场内考生的情况,省去了老师发卷的工作,而且在考试进行期间,机器人也随时在考场内移动,避免了考场中存在监控死角和监考教师的视野盲区。保证了考试的公正性,减轻了监考教师的工作量。
29.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
技术特征:
1.基于红外传感器和无线视频传输的智能辅助监、巡考机器人,其特征在于:包括机器人本体,所述机器人本体包括360摄像头(1)、收发卷箱(2)、轮子(3)、红外传感器(4)、直流电源(5)、悬架(6)、电机(8),所述360摄像头(1)设置在机器人本体的顶部,所述收发卷箱(2)设置在机器人本体的两侧且开口向收发卷箱(2)的两侧外部,收发卷箱(2)的顶部外侧连接有箱门,所述机器人本体的底部设有底盘,所述底盘包括悬架(6)和与悬架(6)连接的四个轮子(3),所述悬架(6)上通过架承式悬挂连接有电机(8),所述悬架(6)上设有直流电源(5),机器人本体内设有自动避障系统,所述自动避障系统的硬件包括红外传感器(4)和灰度传感器,所述红外传感器(4)和灰度传感器连接单片机,所述机器人本体内设有bt蓝牙通信系统,所述bt蓝牙通信系统连接单片机。2.根据权利要求1所述的基于红外传感器和无线视频传输的智能辅助监、巡考机器人,其特征在于:所述机器人包括机器人外壳和机器人车架,所述机器人外壳连接在机器人车架上,底盘与机器人外壳之间采用铝型材焊接而成。3.根据权利要求1所述的基于红外传感器和无线视频传输的智能辅助监、巡考机器人,其特征在于:所述收发卷箱(2)包括多个塑料薄板,通过胶水粘接到机器人本体两侧。4.根据权利要求1所述的基于红外传感器和无线视频传输的智能辅助监、巡考机器人,其特征在于:所述360摄像头(1)通过螺钉连接固定在机器人本体顶部。5.根据权利要求1所述的基于红外传感器和无线视频传输的智能辅助监、巡考机器人,其特征在于:所述机器人本体内设有播放装置,所述播放装置包括音频解码器和喇叭。6.根据权利要求1所述的基于红外传感器和无线视频传输的智能辅助监、巡考机器人,其特征在于:所述360摄像头(1)连接单片机。7.根据权利要求1所述的基于红外传感器和无线视频传输的智能辅助监、巡考机器人,其特征在于:所述机器人本体的后侧设有与直流电源(5)连接的充电插口(7)。
技术总结
本实用新型涉及监、巡考辅助技术领域,具体是一种基于红外传感器和无线视频传输的智能辅助监、巡考机器人,包括机器人本体,机器人本体包括360摄像头、收发卷箱、轮子、红外传感器、直流电源、悬架、电机,360摄像头设置在机器人本体的顶部,收发卷箱设置在机器人本体的两侧,收发卷箱顶部外侧连有箱门,机器人本体底部设底盘,底盘包括悬架和与悬架连接的四个轮子,悬架上通过架承式悬挂连接有电机,悬架上设直流电源,机器人本体内设自动避障系统,自动避障系统的硬件包括红外传感器和灰度传感器,红外传感器和灰度传感器连接单片机,机器人本体内设BT蓝牙通信系统,BT蓝牙通信系统连接单片机。接单片机。接单片机。
技术研发人员:杜浩 陈朗 周成亮 吴斐 邓宇琦
受保护的技术使用者:吉林大学
技术研发日:2022.08.01
技术公布日:2022/11/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1