一种机器人视觉定位装置
1.本实用新型涉及视觉定位技术领域,尤其涉及一种机器人视觉定位装置。
背景技术:
2.视觉定位由于数字图像处理和计算机视觉技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。
3.目前,市面上现有的机器人视觉定位装置还存在以下不足:随着机器人运转的过程中,视觉定位装置会随着机器人的移动而出现偏移,但是长时间的使用,使得视觉定位装置的表面会附着灰尘、杂质等,若不及时处理,则影响后期视觉拍摄的清晰程度。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺陷,而提出的一种机器人视觉定位装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种机器人视觉定位装置,包括可用于机器人相互对接的连接板、视觉定位机构,所述连接板的底部活动设置有视觉定位机构,所述视觉定位机构的正面分别设置有通孔与多个摄像头,所述通孔位于多个摄像头的上方;
7.所述通孔的内部固定安装有微型气缸,所述微型气缸的输出端固定安装有增压泵,所述增压泵的一端固定连通有弯管,所述弯管的端部固定连通有喷头,所述喷头与多个摄像头相互对应。
8.作为本实用新型的一种优选技术方案,所述连接板的顶端中部固定安装有蓄水箱,所述蓄水箱的正面固定连接有连通管,所述连通管的中部设置有水泵,且连通管的一端与增压泵的顶端相互连接。
9.作为本实用新型的一种优选技术方案,所述连接板的底端两侧均固定安装有电动气缸,所述电动气缸的输出端固定连接有连接条。
10.作为本实用新型的一种优选技术方案,所述连接条呈“l”形状,且连接条的一端与视觉定位机构的外部侧壁相互连接。
11.作为本实用新型的一种优选技术方案,所述视觉定位机构的顶端中部固定安装有安装板,所述安装板的顶端中部固定安装有光杆,所述光杆的顶端与连接板的底端相互固定。
12.相比于现有技术,本实用新型的有益效果在于:位于多个摄像头的顶部增设弯管与喷头,通过连通管、增压泵将蓄水箱内部的水体抽出,并通过增压泵传输至喷头之内,使得喷头喷出雾状水汽将多个摄像头的表面得到清洁,有效的杜绝灰尘附着的现象,提高了拍摄时的清晰程度。
附图说明
13.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
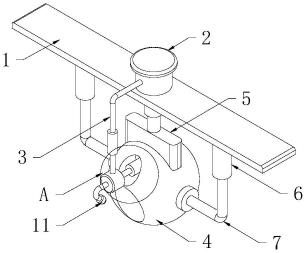
14.图1为本实用新型提出的一种机器人视觉定位装置的整体结构示意图;
15.图2为本实用新型提出的一种机器人视觉定位装置的正视图;
16.图3为本实用新型提出的一种机器人视觉定位装置的侧视图;
17.图4为本实用新型提出的一种机器人视觉定位装置的a处结构放大示意图。
18.图中:1、连接板;2、蓄水箱;3、连通管;4、视觉定位机构;5、安装板;6、电动气缸;7、连接条;8、通孔;9、摄像头;10、弯管;11、喷头;12、增压泵;13、微型气缸。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述;
20.参照图1-4,一种机器人视觉定位装置,包括可用于机器人相互对接的连接板1、视觉定位机构4,其特征在于,连接板1的底部活动设置有视觉定位机构4,视觉定位机构4的正面分别设置有通孔8与多个摄像头9,通孔8位于多个摄像头9的上方;
21.通孔8的内部固定安装有微型气缸13,微型气缸13的输出端固定安装有增压泵12,增压泵12的一端固定连通有弯管10,弯管10的端部固定连通有喷头11,喷头11与多个摄像头9相互对应。
22.连接板1的顶端中部固定安装有蓄水箱2,蓄水箱2的正面固定连接有连通管3,连通管3的中部设置有水泵,且连通管3的一端与增压泵12的顶端相互连接,需要对多个摄像头9进行清洁时,通过水泵将蓄水箱2内部的水体抽出至增压泵12,且通过增压泵12将水体进行增压,使得水体能够顺利的进入到喷头11内,喷头11将水体喷至多个摄像头9的表面上,进而使得水体将摄像头9表面的灰尘实现清洁,从而保障摄像头9表面的整洁性。
23.连接板1的底端两侧均固定安装有电动气缸6,电动气缸6的输出端固定连接有连接条7。连接条7呈“l”形状,且连接条7的一端与视觉定位机构4的外部侧壁相互连接,两组连接条7位于视觉定位机构4的两侧,且与视觉定位机构4进行固定,启动电动气缸6后,可通过电动气缸6的输出端带动连接条7实现上下移动,从而带动视觉定位机构4实现高度的调节,便于机器人后期的定位。
24.视觉定位机构4的顶端中部固定安装有安装板5,安装板5的顶端中部固定安装有光杆,光杆的顶端与连接板1的底端相互固定。
25.使用时,首先对蓄水箱2装满水体,且将连接板1的两个端部与机器人所需定位处进行连接,通过两个电动气缸6带动连接条7进行上下移动,随着连接条7的移动,使得视觉定位机构4实现高度的调节。需要对多个摄像头9的表面进行清洁时,通过连通管3中部的水泵将蓄水箱2内部的水体抽出,且将水体抽至增压泵12的内部,再次跟随增压泵12的增压,使得水体进入到喷头11内部后,喷头11能够有效的将水体喷至多个摄像头9的表面,使得摄像头9表面的灰尘得以清洁,保障摄像头9表面的整洁性。
技术特征:
1.一种机器人视觉定位装置,包括可用于机器人相互对接的连接板(1)、视觉定位机构(4),其特征在于,所述连接板(1)的底部活动设置有视觉定位机构(4),所述视觉定位机构(4)的正面分别设置有通孔(8)与多个摄像头(9),所述通孔(8)位于多个摄像头(9)的上方;所述通孔(8)的内部固定安装有微型气缸(13),所述微型气缸(13)的输出端固定安装有增压泵(12),所述增压泵(12)的一端固定连通有弯管(10),所述弯管(10)的端部固定连通有喷头(11),所述喷头(11)与多个摄像头(9)相互对应。2.根据权利要求1所述的一种机器人视觉定位装置,其特征在于,所述连接板(1)的顶端中部固定安装有蓄水箱(2),所述蓄水箱(2)的正面固定连接有连通管(3),所述连通管(3)的中部设置有水泵,且连通管(3)的一端与增压泵(12)的顶端相互连接。3.根据权利要求1所述的一种机器人视觉定位装置,其特征在于,所述连接板(1)的底端两侧均固定安装有电动气缸(6),所述电动气缸(6)的输出端固定连接有连接条(7)。4.根据权利要求3所述的一种机器人视觉定位装置,其特征在于,所述连接条(7)呈“l”形状,且连接条(7)的一端与视觉定位机构(4)的外部侧壁相互连接。5.根据权利要求1所述的一种机器人视觉定位装置,其特征在于,所述视觉定位机构(4)的顶端中部固定安装有安装板(5),所述安装板(5)的顶端中部固定安装有光杆,所述光杆的顶端与连接板(1)的底端相互固定。
技术总结
本实用新型公开了一种机器人视觉定位装置,涉及视觉定位技术领域,包括可用于机器人相互对接的连接板、视觉定位机构,连接板的底部活动设置有视觉定位机构,视觉定位机构的正面分别设置有通孔与多个摄像头,通孔位于多个摄像头的上方;通孔的内部固定安装有微型气缸,微型气缸的输出端固定安装有增压泵,增压泵的一端固定连通有弯管,弯管的端部固定连通有喷头,喷头与多个摄像头相互对应。该种实用新型,位于多个摄像头的顶部增设弯管与喷头,通过连通管、增压泵将蓄水箱内部的水体抽出,并通过增压泵传输至喷头之内,使得喷头喷出雾状水汽将多个摄像头的表面得到清洁,有效的杜绝灰尘附着的现象,提高了拍摄时的清晰程度。提高了拍摄时的清晰程度。提高了拍摄时的清晰程度。
技术研发人员:周卫 郇新 蒋庆磊 刘庆伟
受保护的技术使用者:潍坊工程职业学院
技术研发日:2022.08.31
技术公布日:2022/11/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1