便于调节的工业机器人的抓取装置的制作方法
本技术属于抓取装置,具体是指便于调节的工业机器人的抓取装置。
背景技术:
1、目前,现有的公开授权专利cn209682218u一种便于调节的工业机器人的抓取装置由于底部缺少承托组件,在抓取物体后容易出现脱离的现象,降低了抓取装置对物体抓取时的牢固性。
技术实现思路
1、为了解决上述难题,本实用新型提供了能够在物体抓取过程中将物体托起,同时能够根据不同大小的物体对托板的位置进行调节,增加物体的稳定性,使用灵活方便的便于调节的工业机器人的抓取装置。
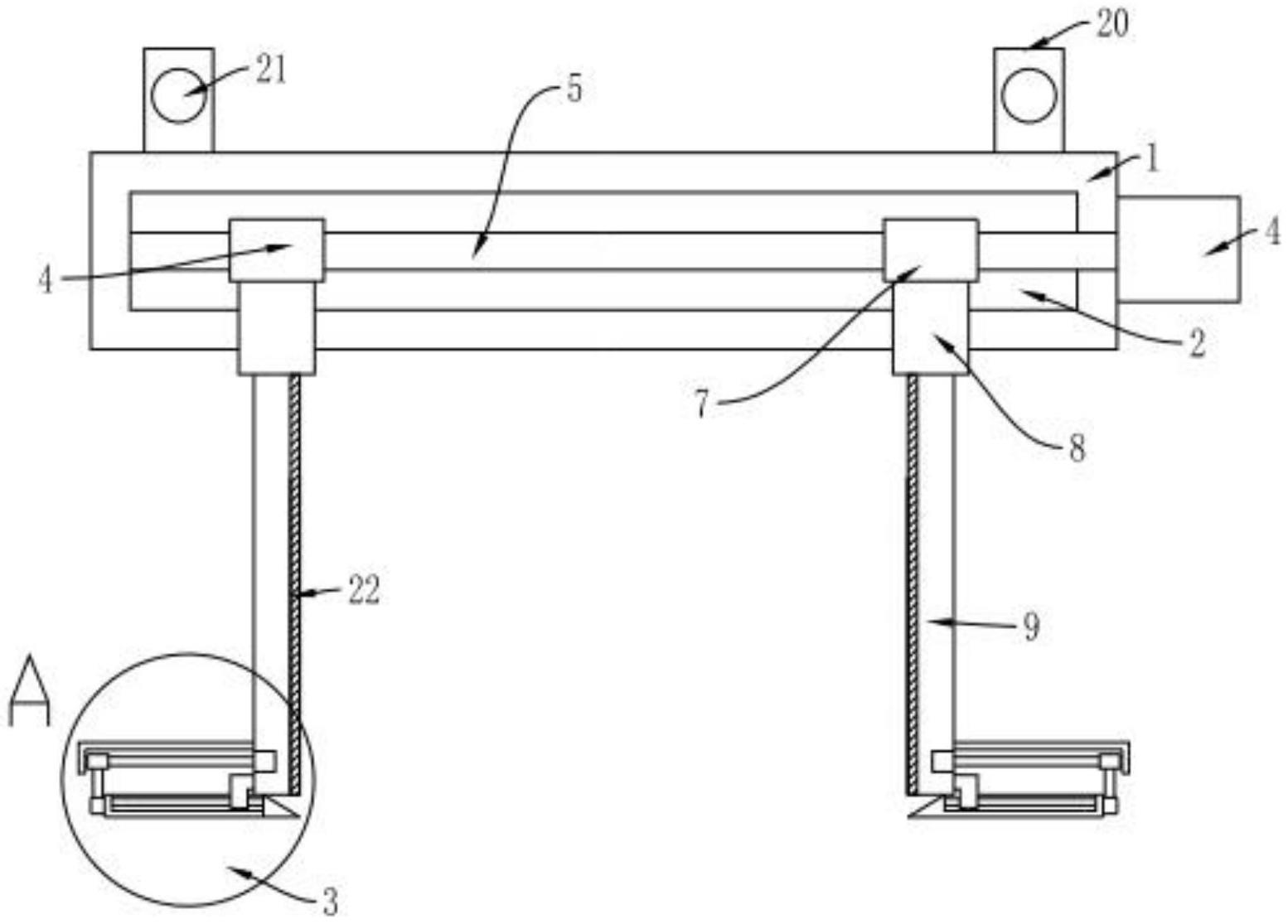
2、为了实现上述功能,本实用新型采取的技术方案如下:便于调节的工业机器人的抓取装置,包括支撑板、抓取机构和承托调节机构,所述抓取机构设于支撑板上,所述承托调节机构设于抓取机构上;所述抓取机构包括伺服电机一、双向丝杠、丝杠副一、丝杠副二、衔接板和夹爪,所述伺服电机一设于支撑板外侧壁上,所述双向丝杠一端转动设于支撑板内侧壁上,所述双向丝杠另一端设于伺服电机一上,所述丝杠副一和丝杠副二套接于双向丝杠上,所述衔接板贯穿支撑板底壁设于丝杠副一和丝杠副二下,所述夹爪设于衔接板下。
3、优选地,所述承托调节机构包括伺服电机二、固定套板、连接杆、凹槽、支撑架、螺纹套块、连接板、螺纹杆、外接板和托板,所述支撑架设于夹爪外侧壁上,所述固定套板靠近支撑支撑架设于夹爪外侧壁上,所述伺服电机二设于夹爪内,所述螺纹杆一端转动设于支撑架侧壁上,所述螺纹杆另一端设于伺服电机二上,所述螺纹套块套接于螺纹杆上,所述连接板设于螺纹套块下,所述外接板设于连接板下,所述托板设于外接板上,所述凹槽设于托板顶壁下,所述连接杆贯穿固定套板设于凹槽内侧壁上。
4、优选地,所述支撑板上设有安装板,所述安装板设有安装孔,便于对装置整体进行安装。
5、优选地,所述夹爪外侧壁上设有防滑层,增加与物体接触面的摩擦力,增加稳定性。
6、优选地,所述支撑架和固定套板均为l形结构。
7、本实用新型采取上述结构取得有益效果如下:本实用新型提供的便于调节的工业机器人的抓取装置通过抓取机构的设置,伺服电机一带动双向丝杠转动,双向丝杠带动丝杠副一和丝杠副二相互靠近,进而带动衔接板和夹爪相互靠近,夹爪将物体夹紧固定,进行抓取;通过承托调节机构的设置,伺服电机二带动螺纹杆转动,螺纹杆带动螺纹套块移动,螺纹套块带动连接板、外接板和托板整体移动,从而带动连接杆相对固定套块滑动,将托板移出,对托板移出的位置进行调节,使用更加灵活方便,托板将物体托起,增加物体的稳定性。
技术特征:
1.便于调节的工业机器人的抓取装置,其特征在于:包括支撑板、抓取机构和承托调节机构,所述抓取机构设于支撑板上,所述承托调节机构设于抓取机构上;所述抓取机构包括伺服电机一、双向丝杠、丝杠副一、丝杠副二、衔接板和夹爪,所述伺服电机一设于支撑板外侧壁上,所述双向丝杠一端转动设于支撑板内侧壁上,所述双向丝杠另一端设于伺服电机一上,所述丝杠副一和丝杠副二套接于双向丝杠上,所述衔接板贯穿支撑板底壁设于丝杠副一和丝杠副二下,所述夹爪设于衔接板下。
2.根据权利要求1所述的便于调节的工业机器人的抓取装置,其特征在于:所述承托调节机构包括伺服电机二、固定套板、连接杆、凹槽、支撑架、螺纹套块、连接板、螺纹杆、外接板和托板,所述支撑架设于夹爪外侧壁上,所述固定套板靠近支撑支撑架设于夹爪外侧壁上,所述伺服电机二设于夹爪内,所述螺纹杆一端转动设于支撑架侧壁上,所述螺纹杆另一端设于伺服电机二上,所述螺纹套块套接于螺纹杆上,所述连接板设于螺纹套块下,所述外接板设于连接板下,所述托板设于外接板上,所述凹槽设于托板顶壁下,所述连接杆贯穿固定套板设于凹槽内侧壁上。
3.根据权利要求2所述的便于调节的工业机器人的抓取装置,其特征在于:所述支撑板上设有安装板,所述安装板设有安装孔。
4.根据权利要求3所述的便于调节的工业机器人的抓取装置,其特征在于:所述夹爪外侧壁上设有防滑层。
5.根据权利要求4所述的便于调节的工业机器人的抓取装置,其特征在于:所述支撑架和固定套板均为l形结构。
技术总结
本技术公开了便于调节的工业机器人的抓取装置,包括支撑板、抓取机构和承托调节机构,所述抓取机构设于支撑板上,所述承托调节机构设于抓取机构上;所述抓取机构包括伺服电机一、双向丝杠、丝杠副一、丝杠副二、衔接板和夹爪,所述伺服电机一设于支撑板外侧壁上,所述双向丝杠一端转动设于支撑板内侧壁上,所述双向丝杠另一端设于伺服电机一上,所述丝杠副一和丝杠副二套接于双向丝杠上。本技术属于抓取装置技术领域,具体是指能够在物体抓取过程中将物体托起,同时能够根据不同大小的物体对托板的位置进行调节,增加物体的稳定性,使用灵活方便的便于调节的工业机器人的抓取装置。
技术研发人员:张庆刚
受保护的技术使用者:嘉宏拓信科技(珠海横琴)有限公司
技术研发日:20220831
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!