一种半导体制造用机械手臂的制作方法
本技术涉及机械手臂,具体为一种半导体制造用机械手臂。
背景技术:
1、机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。
2、授权公开号为cn207326983u公开了一种半导体制造用机械手臂,包括机械手臂主支撑杆,机械手臂主连接杆和机械手臂连接凹槽,所述机械手臂主支撑杆的底端设置有机械手臂连接块,所述机械手臂连接旋转轴的端部设置有机械手臂主连接杆,所述机械手臂主连接杆的端部设置有机械手臂操作杆,所述机械手臂主支撑杆的表面设置有机械手臂主连接杆放置凹槽;本实用新型中设计的机械手臂固定连接底座伸缩柱可以在加工时根据操作的需要进行伸缩,从而加长机械手臂的长度,本实用新型中设计的机械手臂连接凹槽可以在连接时直接将机械手臂进行固定连接,同时缓冲垫圈可以在使用时将机械手臂之间的连接进行缓冲减压,操作起来更加的顺畅。
3、但该方案仍存在不足,机械手臂的安装和拆卸工作都较为麻烦,当机械手臂损坏需要拆卸进行维修或更换时的操作较为麻烦,较为浪费时间,增大了操作人员的劳动强度,降低了安装和拆卸机械手臂的效率,并且机械手臂的工作范围有限,从而影响机械手臂的实用性,为此,我们提出一种半导体制造用机械手臂。
技术实现思路
1、本实用新型的目的在于提供一种半导体制造用机械手臂,以解决上述背景技术提出的问题。
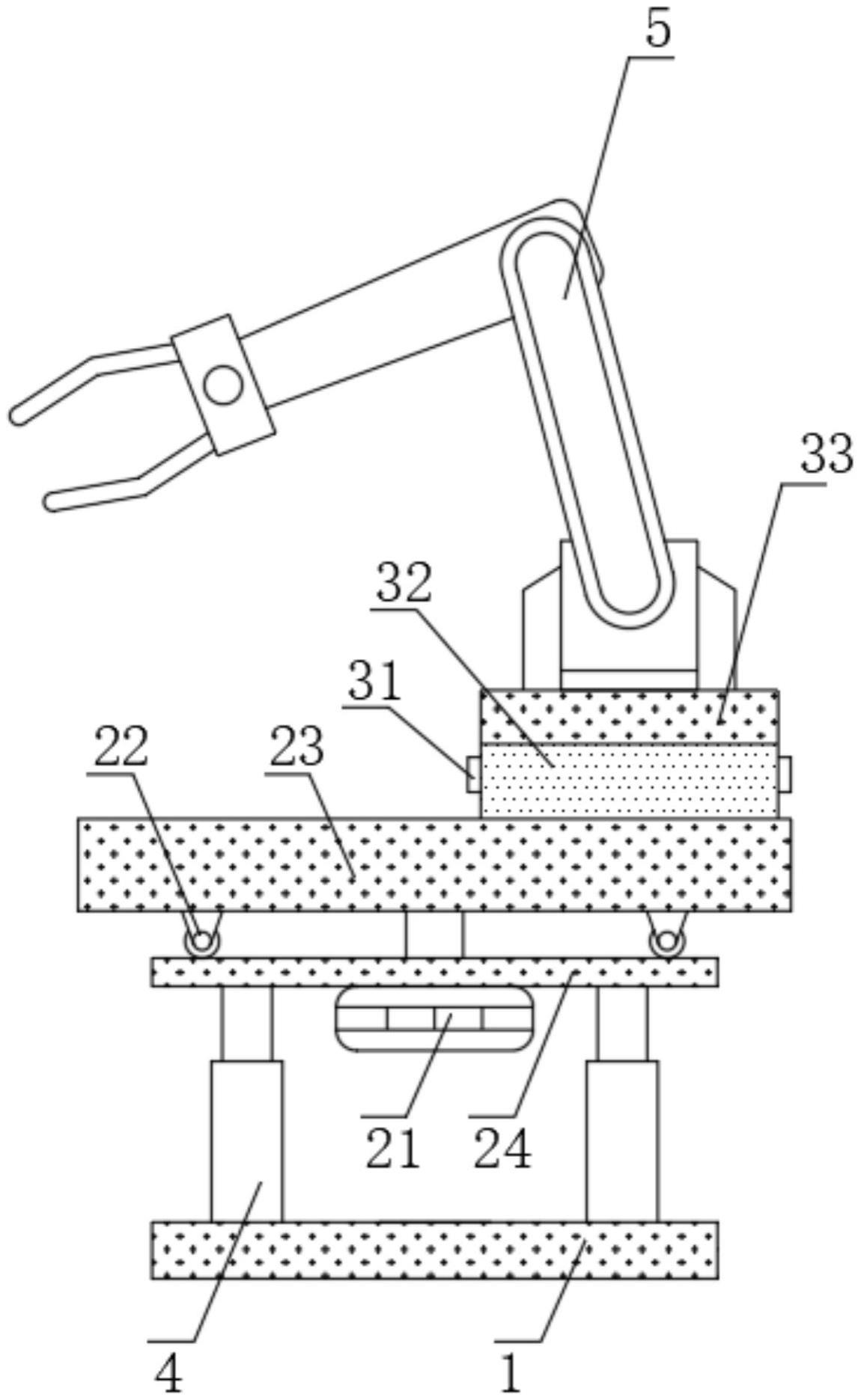
2、为实现上述目的,本实用新型提供如下技术方案:一种半导体制造用机械手臂,包括底座,所述底座上设有气缸,通过设置有气缸,便于调节机械手本体的高度,利于提高机械手本体的操作范围,所述气缸上设有移动机构,通过设置有移动机构,起到调整机械手本体位置的目的,利于提高机械手本体的操作范围,所述移动机构上设有安装机构,通过设置有安装机构,起到方便安装和拆卸机械手本体的目的,所述安装机构上设有机械手本体,所述移动机构包括承接板,所述承接板固定安装于气缸的活塞杆端,所述承接板的底端设有第一电机,通过设置有第一电机,便于带动条形箱转动,所述第一电机的转轴端设有条形箱,条形箱的顶端为开口设置,所述条形箱的底端设有滚轮,通过设置有滚轮,便于承接条形箱的转动。
3、优选的,所述条形箱内设有滑杆,所述滑杆上滑动连接有滑块,滑杆为方形杆,通过设置有滑杆,便于承接滑块的滑动。
4、优选的,所述滑块的底端设有第二电机,所述第二电机的转轴端设有齿轮,第二电机具有正反转功能。
5、优选的,所述条形箱的内壁设有齿条,所述齿条与齿轮相啮合,通过设置有齿轮和齿条,在第二电机工作时,起到带动滑块沿着滑杆滑动的目的。
6、优选的,所述安装机构包括安装板,所述安装板固定安装于滑块上。
7、优选的,所述安装板上开设有定位槽,通过设置有定位槽,便于承接定位杆的插接,所述安装板内开设有弹簧槽,所述弹簧槽内滑动设置有插块,插块的截面形状为凸块,所述插块的个数为两个,两个所述插块之间设有弹簧,弹簧处于压缩状态,所述插块的一端贯穿定位槽,所述插块的侧面设有按杆,通过设置有按杆,便于带动插块沿着弹簧槽的内壁滑动,所述按杆的一端贯穿安装板。
8、优选的,所述安装板上插接有承台,所述承台与机械手本体固定连接,所述承台的底端设有定位杆,所述定位杆的侧面开设有插槽,通过设置有插槽,便于插块的插接。
9、与现有技术相比,本实用新型的有益效果是:
10、1.本实用新型通过设置有移动机构,配合气缸,起到调整机械手本体位置的目的,利于提高机械手本体的操作范围。
11、2.本实用新型通过设置有安装机构,起到方便安装和拆卸机械手本体的目的。
技术特征:
1.一种半导体制造用机械手臂,其特征在于,包括:
2.根据权利要求1所述的一种半导体制造用机械手臂,其特征在于:所述条形箱(23)内设有滑杆(27),所述滑杆(27)上滑动连接有滑块(29)。
3.根据权利要求2所述的一种半导体制造用机械手臂,其特征在于:所述滑块(29)的底端设有第二电机(28),所述第二电机(28)的转轴端设有齿轮(26)。
4.根据权利要求3所述的一种半导体制造用机械手臂,其特征在于:所述条形箱(23)的内壁设有齿条(25),所述齿条(25)与齿轮(26)相啮合。
5.根据权利要求2所述的一种半导体制造用机械手臂,其特征在于:所述安装机构包括安装板(32),所述安装板(32)固定安装于滑块(29)上。
6.根据权利要求5所述的一种半导体制造用机械手臂,其特征在于:所述安装板(32)上开设有定位槽(35),所述安装板(32)内开设有弹簧槽(38),所述弹簧槽(38)内滑动设置有插块(34),所述插块(34)的个数为两个,两个所述插块(34)之间设有弹簧(37),所述插块(34)的一端贯穿定位槽(35),所述插块(34)的侧面设有按杆(31),所述按杆(31)的一端贯穿安装板(32)。
7.根据权利要求5所述的一种半导体制造用机械手臂,其特征在于:所述安装板(32)上插接有承台(33),所述承台(33)与机械手本体(5)固定连接,所述承台(33)的底端设有定位杆(39),所述定位杆(39)的侧面开设有插槽(36)。
技术总结
本技术公开了一种半导体制造用机械手臂,包括底座,底座上设有气缸,气缸上设有移动机构,移动机构上设有安装机构,安装机构上设有机械手本体,移动机构包括承接板,承接板固定安装于气缸的活塞杆端,承接板的底端设有第一电机,第一电机的转轴端设有条形箱,条形箱的底端设有滚轮。本技术通过设置有移动机构,配合气缸,起到调整机械手本体位置的目的,利于提高机械手本体的操作范围,本技术通过设置有安装机构,起到方便安装和拆卸机械手本体的目的。
技术研发人员:李红星
受保护的技术使用者:广东翔伟自动化科技有限公司
技术研发日:20220905
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!