助力机械手平衡控制器的制作方法
1.本实用新型涉及助力机械手技术领域,特别涉及助力机械手平衡控制器。
背景技术:
2.助力机械手,是一种新颖的、用于物料搬运及安装时省力操作的助力设备,它巧妙地应用力的平衡原理,使操作者对重物进行相应的推拉,就可在空间内平衡移动定位,重物在提升或下降时形成浮动状态,靠气路保证零操作力操作力受工件重量影响,无需熟练的点动操作,操作者用手推拉重物,就可以把重物正确地放到空间中的任何位置。
3.现有的助力机械手,在夹持的物体较重时,助力机械手两侧会发生受力不均的问题,进而在长时间受力不均的情况下进行工作,会使得助力机械手的部件进行发生变形,进而导致损坏的风险,为此,我们提出助力机械手平衡控制器。
技术实现要素:
4.本实用新型的主要目的在于提供助力机械手平衡控制器,可以有效解决背景技术中的问题。
5.为实现上述目的,本实用新型采取的技术方案为:
6.助力机械手平衡控制器,包括支撑座、平衡组件与稳定组件,所述支撑座包括上端的第一旋转臂,以及第一旋转臂上端安装的活动臂,所述平衡组件包括活动臂后端焊接的延伸架,以及延伸架上端活动安装的平衡块,所述平衡组件还包括平衡块内部安装的丝杆座,以及丝杆座内部活动安装的滚珠丝杆。
7.优选的,所述平衡组件还包括延伸架后端安装的对滚珠丝杆进行驱动的步进电机,以及步进电机两侧与延伸架之间安装的固定架。
8.优选的,所述平衡组件还包括平衡块两侧对称贯穿开设的圆孔。
9.优选的,所述平衡组件还包括延伸架两侧安装的固定台,以及固定台中央安装的处于圆孔内部的圆杆。
10.优选的,所述平衡组件还包括平衡块两侧固定台上端套设的弹簧。
11.优选的,所述稳定组件包括平衡块底部排列安装的底部滚轮,且底部滚轮的数量为两组。
12.优选的,所述稳定组件还包括平衡块两侧贴合于延伸架排列安装的侧部滚轮,且侧部滚轮的数量为四组。
13.优选的,所述支撑座还包括活动臂底部安装的第二旋转臂,以及第二旋转臂下端安装的机械手夹具,所述第一旋转臂与延伸架之间还安装有气缸,所述第一旋转臂前端还安装有控制箱。
14.与现有技术相比,本实用新型具有如下有益效果:
15.1、助力机械手平衡控制器,延伸架上端的平衡块,能够在延伸架前端活动臂的升降调节中,同步的对延伸架上端的平衡块进行移动调节,进而以保持助力机械手两侧的平
衡,避免两侧因受力不均,而造成助力机械手损坏的问题;
16.2、助力机械手平衡控制器,平衡块底部和内侧安装的底部滚轮和侧部滚轮,可减小平衡块移动时与延伸架之间的摩擦阻力,进而保持平衡块移动中的轻便和流畅。
附图说明
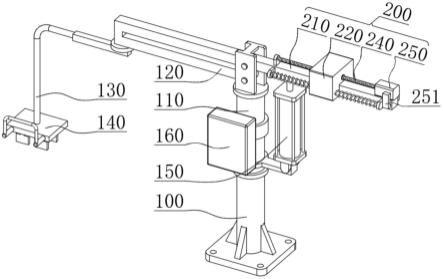
17.图1为本实用新型助力机械手平衡控制器的整体结构示意图;
18.图2为本实用新型助力机械手平衡控制器的局部上视图;
19.图3为本实用新型助力机械手平衡控制器平衡块的侧剖视图。
20.附图标记:
21.100、支撑座;110、第一旋转臂;120、活动臂;130、第二旋转臂;140、机械手夹具;150、气缸;160、控制箱;
22.200、平衡组件;210、延伸架;220、平衡块;230、丝杆座;240、滚珠丝杆;250、步进电机;251、固定架;260、圆孔;270、固定台;280、圆杆;290、弹簧;
23.300、稳定组件;310、底部滚轮;320、侧部滚轮。
具体实施方式
24.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
25.实施例一:
26.如图1-3所示,本实施例提供了助力机械手平衡控制器,包括支撑座100、平衡组件200与稳定组件300,支撑座100包括上端的第一旋转臂110,以及第一旋转臂110上端安装的活动臂120,支撑座100还包括活动臂120底部安装的第二旋转臂130,以及第二旋转臂130下端安装的机械手夹具140,第一旋转臂110与延伸架210之间还安装有气缸150,第一旋转臂110前端还安装有控制箱160,平衡组件200包括活动臂120后端焊接的延伸架210,以及延伸架210上端活动安装的平衡块220,平衡组件200还包括平衡块220内部安装的丝杆座230,以及丝杆座230内部活动安装的滚珠丝杆240,平衡组件200还包括延伸架210后端安装的对滚珠丝杆240进行驱动的步进电机250,以及步进电机250两侧与延伸架210之间安装的固定架251,平衡组件200还包括平衡块220两侧对称贯穿开设的圆孔260,平衡组件200还包括延伸架210两侧安装的固定台270,以及固定台270中央安装的处于圆孔260内部的圆杆280,平衡组件200还包括平衡块220两侧固定台270上端套设的弹簧290,步进电机250的型号为110byg350a。
27.具体的,延伸架210上端的平衡块220,能够在延伸架210前端活动臂120的升降调节中,通过后端步进电机250的驱动,同步的对延伸架210上端的平衡块220进行移动调节,进而以保持助力机械手两侧的平衡,避免两侧因受力不均,而造成助力机械手损坏的问题,平衡块220两侧连接的圆杆280和弹簧290,可保持平衡块220前后移动中的稳定性。
28.实施例二:
29.在实施例一的基础上,如图3所示,稳定组件300包括平衡块220底部排列安装的底部滚轮310,且底部滚轮310的数量为两组,稳定组件300还包括平衡块220两侧贴合于延伸架210排列安装的侧部滚轮320,且侧部滚轮320的数量为四组。
30.具体的,平衡块220底部和内侧安装的底部滚轮310和侧部滚轮320,可在平衡块220沿着延伸架210移动时进行滚动,以减小平衡块220移动时与延伸架210之间的摩擦阻力,进而保持平衡块220移动中的轻便和流畅。
31.本实用新型的工作原理及使用流程:
32.气缸150抬升对活动臂120下压,使得活动臂120前端底部的机械手夹具140对物体进行夹持时,活动臂120后端延伸架210尾端的步进电机250将启动,并通过驱动滚珠丝杆240正转,将滚珠丝杆240上端的平衡块220,沿着两侧的圆杆280,在底部和内侧底部滚轮310和侧部滚轮320的滚动下,进行后移,进而保持机械手夹具140下压时助力机械手两侧的平衡,气缸150下降对活动臂120上移,使得活动臂120前端底部的机械手夹具140对物体进行夹持后的上移时,步进电机250将驱动滚珠丝杆240反转,使得滚珠丝杆240驱动上端的平衡块220,沿着两侧的圆杆280,在底部和内侧底部滚轮310和侧部滚轮320的滚动下,进行前移,保持物体抬升时,助力机械手两侧的平衡。
33.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解,在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
技术特征:
1.助力机械手平衡控制器,包括支撑座(100)、平衡组件(200)与稳定组件(300),所述支撑座(100)包括上端的第一旋转臂(110),以及第一旋转臂(110)上端安装的活动臂(120),其特征在于,所述平衡组件(200)包括活动臂(120)后端焊接的延伸架(210),以及延伸架(210)上端活动安装的平衡块(220),所述平衡组件(200)还包括平衡块(220)内部安装的丝杆座(230),以及丝杆座(230)内部活动安装的滚珠丝杆(240)。2.根据权利要求1所述的助力机械手平衡控制器,其特征在于,所述平衡组件(200)还包括延伸架(210)后端安装的对滚珠丝杆(240)进行驱动的步进电机(250),以及步进电机(250)两侧与延伸架(210)之间安装的固定架(251)。3.根据权利要求1所述的助力机械手平衡控制器,其特征在于,所述平衡组件(200)还包括平衡块(220)两侧对称贯穿开设的圆孔(260)。4.根据权利要求1所述的助力机械手平衡控制器,其特征在于,所述平衡组件(200)还包括延伸架(210)两侧安装的固定台(270),以及固定台(270)中央安装的处于圆孔(260)内部的圆杆(280)。5.根据权利要求1所述的助力机械手平衡控制器,其特征在于,所述平衡组件(200)还包括平衡块(220)两侧固定台(270)上端套设的弹簧(290)。6.根据权利要求1所述的助力机械手平衡控制器,其特征在于,所述稳定组件(300)包括平衡块(220)底部排列安装的底部滚轮(310),且底部滚轮(310)的数量为两组。7.根据权利要求1所述的助力机械手平衡控制器,其特征在于,所述稳定组件(300)还包括平衡块(220)两侧贴合于延伸架(210)排列安装的侧部滚轮(320),且侧部滚轮(320)的数量为四组。8.根据权利要求1所述的助力机械手平衡控制器,其特征在于,所述支撑座(100)还包括活动臂(120)底部安装的第二旋转臂(130),以及第二旋转臂(130)下端安装的机械手夹具(140),所述第一旋转臂(110)与延伸架(210)之间还安装有气缸(150),所述第一旋转臂(110)前端还安装有控制箱(160)。
技术总结
本实用新型公开了助力机械手平衡控制器,包括支撑座、平衡组件与稳定组件,所述支撑座包括上端的第一旋转臂,以及第一旋转臂上端安装的活动臂,所述平衡组件包括活动臂后端焊接的延伸架,以及延伸架上端活动安装的平衡块,所述平衡组件还包括平衡块内部安装的丝杆座。本实用新型所述的助力机械手平衡控制器,延伸架上端的平衡块,能够在延伸架前端活动臂的升降调节中,同步的对延伸架上端的平衡块进行移动调节,进而以保持助力机械手两侧的平衡,避免两侧因受力不均,而造成助力机械手损坏的问题,平衡块底部和内侧安装的底部滚轮和侧部滚轮,可减小平衡块移动时与延伸架之间的摩擦阻力,进而保持平衡块移动中的轻便和流畅。进而保持平衡块移动中的轻便和流畅。进而保持平衡块移动中的轻便和流畅。
技术研发人员:张忠伟
受保护的技术使用者:艾锐克智能装备(江苏)有限公司
技术研发日:2022.09.06
技术公布日:2023/1/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1