一种机械臂传动装置的制作方法
本技术涉及机械臂领域,尤指一种机械臂传动装置。
背景技术:
1、工业机器人的驱动源通过传动部件来驱动关节的移动或转动,从而实现机身、手臂和手腕的运动。因此,传动部件是构成工业机器人的重要部件。
2、工业机器人传动方式很多种,根据传动类型的不同,传动部件可以分为两大类:直线传动机构和旋转传动机构,由于多使用多关节机器人,因此本发明主要针对旋转传动机构的优化。
3、一般电机都能够直接产生旋转运动,但其输出力矩比所要求的力矩小,转速比要求的转速高,因此需要采用齿轮、皮带或其他运动传动机构,把较高的转速转换成较低的转速,并获得较大的力矩。
4、运动的传递和转换必须高效率地完成,并且不能有损于机器人系统所需要的特性,包括定位精度、重复定位精度和可靠性等,而采用齿轮、皮带的传动方式要面临传动精度降低的问题,以此同时,采用齿轮、皮带传动的方式较为复杂,增加了加工难度与组装难度;
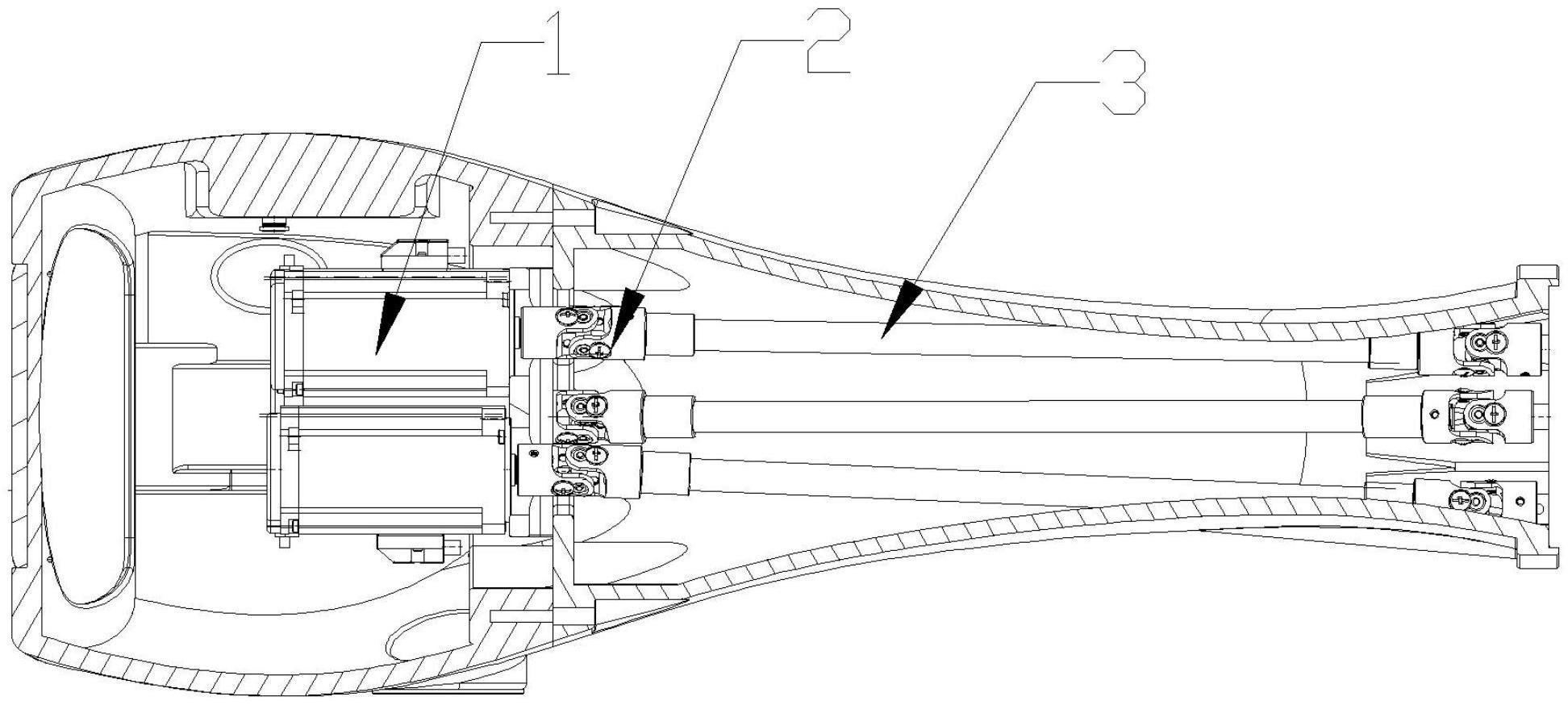
5、除却上述问题以为,如图1所示,传动轴的连接方式是通过中空嵌套的方式连接,如,j4传动轴套在j5传动轴上,j5传动轴套在j6传动轴上,通过伺服电机偏置分别与各传动轴连接,实现各轴运动。
技术实现思路
1、为解决上述问题,本实用新型提供一种机械臂传动装置,其目的旨在解决传动方式复杂和传动精度低的问题。
2、为实现上述目的,本实用新型采用的技术方案是:一种机械臂传动装置,用于与腕部传动,其特征在于,包含:伺服电机、传动轴、联轴器,伺服电机通过联轴器和传动轴相连。
3、进一步地,传动轴与联轴器之间是通过螺丝锁紧。
4、进一步地,伺服电机上的电机轴与传动轴之间通过螺丝锁附。
5、进一步地,还包括有包围伺服电机、传动轴、联轴器的壳体,所述壳体具有远离腕部的后端,伺服电机位于所述后端内。
6、进一步地,所述传动轴是用复合材料制作。
7、本实用新型的有益效果在于:
8、本实用新型采用联轴器直连伺服电机,代替传统的传动机构的中空齿轮组,因此,杜绝了传动精度受到影响的情况,从而解决传动精度降低的问题,且传动方式相对于中空嵌套结构更为简易,加工难度和组装难度都能明显得到减少。
技术特征:
1.一种机械臂传动装置,用于与腕部传动,其特征在于,包含:伺服电机、传动轴、联轴器,伺服电机通过联轴器和传动轴相连;传动轴与联轴器之间是通过螺丝锁紧;伺服电机上的电机轴与传动轴之间通过螺丝锁附;还包括有包围伺服电机、传动轴、联轴器的壳体,所述壳体具有远离腕部的后端,伺服电机位于所述后端内。
2.根据权利要求1所述的一种机械臂传动装置,其特征在于:所述传动轴是用复合材料制作。
技术总结
本技术涉及机械臂领域,尤指一种机械臂传动装置,用于与腕部传动,包含:伺服电机、传动轴、联轴器,伺服电机通过联轴器和传动轴相连;传动轴与联轴器之间是通过螺丝锁紧;伺服电机上的电机轴与传动轴之间通过螺丝锁附;还包括有包围伺服电机、传动轴、联轴器的壳体,所述壳体具有远离腕部的后端,伺服电机位于所述后端内,本技术采用联轴器直连伺服电机,代替传统的传动机构的中空齿轮组,因此,杜绝了传动精度受到影响的情况,从而解决传动精度降低的问题,且传动方式相对于中空嵌套结构更为简易,加工难度和组装难度都能明显得到减少。
技术研发人员:王鑫,张文欣,朱荣佳,凌建杨
受保护的技术使用者:中铭谷智能机器人(广东)有限公司
技术研发日:20220919
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!