一种带防意外开启机构的全机械驱动机械手的制作方法
本技术涉及机械手,具体为一种带防意外开启机构的全机械驱动机械手。
背景技术:
1、在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,都要用到机械手来完成工件的取放;机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置,它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。
2、常见的机械手多为由电动伺服或气动伺服驱动来实现机械手的抓取、放下、翻转、移动等动作。
3、发明专利cn201610999920.8(cn108068103a)提供了一种全机械驱动并带防意外开启机构的机械手,该装置采用了机械外力推动结构,用简单机械外力推动手指锁来实现机械手的抓取、放下、防意外开启锁死的动作。但其装置仅适用于只采用机械动作而不采用电动或气动伺服驱动的方式,不能在机械手主体外侧设置防意外开启机构。
4、现有的带防意外开启机构的全机械驱动机械手,机械手主体的外侧无防意外开启机构,难以阻止机械手主体发生意外开启的情况发生,而且,机械手主体的安装端比较硬性安装连接,无减震缓冲机构降低机械手主体的震动。
技术实现思路
1、本实用新型的目的在于提供一种带防意外开启机构的全机械驱动机械手,以解决机械手主体的外侧无防意外开启机构,难以阻止机械手主体发生意外开启的情况发生的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种带防意外开启机构的全机械驱动机械手,包括机械手主体,所述机械手主体的表面固定有安装板,所述安装板的一侧安装有缓冲板,所述安装板的另一侧安装有调节板。
3、优选的,所述安装板为矩形结构,所述调节板与所述安装板平行,所述调节板的中间开有调节槽,所述机械手主体穿过所述调节槽。
4、优选的,所述调节板与所述安装板的中间连接有阻拦带,所述阻拦带采用伸缩带结构,所述阻拦带罩住所述机械手主体的一端,所述机械手主体的一端表面固定有限位块。
5、优选的,所述缓冲板的中间有导向孔,所述导向孔为圆形结构,所述机械手主体的一端穿过所述导向孔,所述缓冲板的外侧碾压有减震垫,所述减震垫采用弹性橡胶材质。
6、优选的,所述缓冲板与所述安装板平行,所述缓冲板与所述安装板之间连接有缓冲柱,所述缓冲柱位于所述机械手主体的一端外侧周围。
7、优选的,所述缓冲柱的表面套接有缓冲弹簧。
8、优选的,所述机械手主体的中间开有定位孔,所述机械手主体的中间黏贴有防护垫,所述防护垫的内侧固定有定位块,所述定位块插入所述定位孔。
9、与现有技术相比,本实用新型的有益效果是:
10、1.本实用新型通过在机械手主体的中间固定有安装板,且在机械手主体的表面移动滑动套接安装调节板,调节板与安装板之间连接的阻拦带,采用可伸缩结构,随着调节板在机械手主体表面的移动,可以对机械手主体一端表面进行包裹覆盖,阻拦机械手主体意外开启,作为机械手主体的防意外开启机构,可以调节覆盖包裹的范围,应用灵活。
11、2.本实用新型在机械手主体的一端设置缓冲板,并通过缓冲柱与安装板连接,且在缓冲柱表面套接缓冲弹簧,在缓冲板的外侧黏贴减震垫,以及在机械手主体的中间设置防护垫,如此,对机械手主体的安装端及中间提供减震缓冲防护。
技术特征:
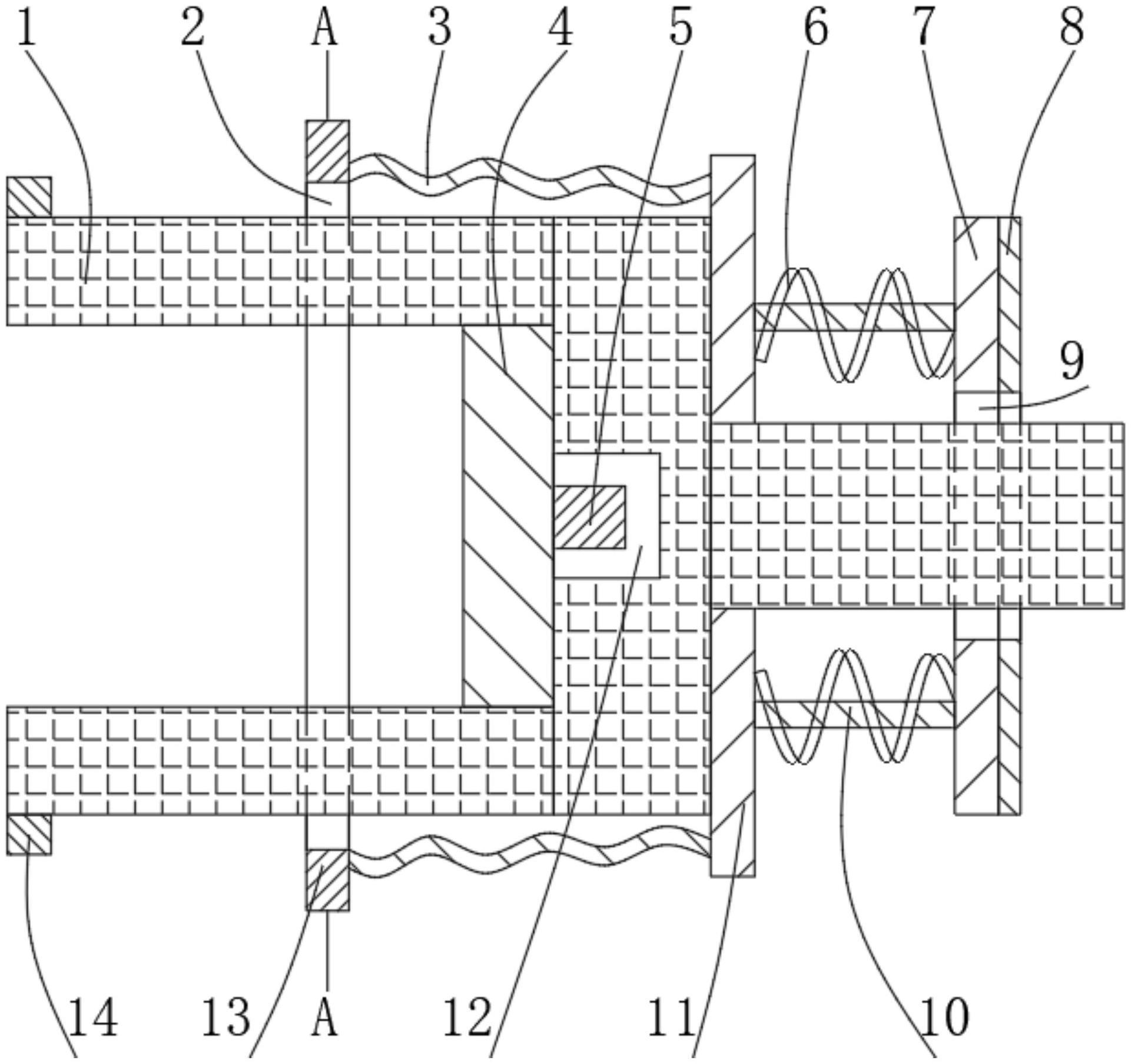
1.一种带防意外开启机构的全机械驱动机械手,其特征在于,包括:机械手主体(1),所述机械手主体(1)的表面固定有安装板(11),所述安装板(11)的一侧安装有缓冲板(7),所述安装板(11)的另一侧安装有调节板(13)。
2.根据权利要求1所述的一种带防意外开启机构的全机械驱动机械手,其特征在于:所述安装板(11)为矩形结构,所述调节板(13)与所述安装板(11)平行,所述调节板(13)的中间开有调节槽(2),所述机械手主体(1)穿过所述调节槽(2)。
3.根据权利要求1所述的一种带防意外开启机构的全机械驱动机械手,其特征在于:所述调节板(13)与所述安装板(11)的中间连接有阻拦带(3),所述阻拦带(3)采用伸缩带结构,所述阻拦带(3)罩住所述机械手主体(1)的一端,所述机械手主体(1)的一端表面固定有限位块(14)。
4.根据权利要求1所述的一种带防意外开启机构的全机械驱动机械手,其特征在于:所述缓冲板(7)的中间有导向孔(9),所述导向孔(9)为圆形结构,所述机械手主体(1)的一端穿过所述导向孔(9),所述缓冲板(7)的外侧碾压有减震垫(8),所述减震垫(8)采用弹性橡胶材质。
5.根据权利要求1所述的一种带防意外开启机构的全机械驱动机械手,其特征在于:所述缓冲板(7)与所述安装板(11)平行,所述缓冲板(7)与所述安装板(11)之间连接有缓冲柱(10),所述缓冲柱(10)位于所述机械手主体(1)的一端外侧周围。
6.根据权利要求5所述的一种带防意外开启机构的全机械驱动机械手,其特征在于:所述缓冲柱(10)的表面套接有缓冲弹簧(6)。
7.根据权利要求1所述的一种带防意外开启机构的全机械驱动机械手,其特征在于:所述机械手主体(1)的中间开有定位孔(12),所述机械手主体(1)的中间黏贴有防护垫(4),所述防护垫(4)的内侧固定有定位块(5),所述定位块(5)插入所述定位孔(12)。
技术总结
本技术公开了一种带防意外开启机构的全机械驱动机械手,包括机械手主体,机械手主体的表面固定有安装板,安装板的一侧安装有缓冲板,安装板的另一侧安装有调节板。本技术通过在机械手主体的中间固定有安装板,调节板与安装板之间连接的阻拦带,随着调节板在机械手主体表面的移动,可以对机械手主体一端表面进行包裹覆盖,阻拦机械手主体的意外开启,可以调节覆盖包裹的范围,应用灵活。在缓冲板的外侧黏贴减震垫,以及在机械手主体的中间设置防护垫,如此,对机械手主体的安装端及中间提供减震缓冲防护。
技术研发人员:李红星
受保护的技术使用者:广东翔伟自动化科技有限公司
技术研发日:20220927
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!