一种机器人的防撞组件的制作方法
本技术涉及机器人防撞组件,特别涉及一种机器人的防撞组件。
背景技术:
1、公开号cn 108972630 a的实用新型公开了一种机器人防撞装置,包括底盘,所述底盘内部安装有支撑座,所述底盘外侧设有支撑板,所述支撑板外侧安装有防撞轮,所述支撑座外侧开有第一凹槽,所述支撑板内侧开有第二凹槽,所述第一凹槽与第二凹槽之间固定连接有缓冲装置,所述缓冲装置外侧套接有第一弹簧,所述第一弹簧两端分别连接于第一凹槽底部与第二凹槽底部,所述底盘内部中间固定连接有固定座,所述固定座外侧开有卡槽。本发明结构新颖,通过支撑板、支撑座、缓冲装置和第一弹簧的设置,使得底盘与外界发生碰撞时,支撑板先触及到被碰撞的物体,由与第一弹簧和缓冲装置的设置,实现支撑板可以有着两层缓冲,提高支撑板的缓冲冲击力的效果。通过对上述现有技术的分析发现,该机器人防撞装置只能对底盘进行缓冲防护,无法对机器人全身进行全面缓冲防护,并且上述现有技术也只能对沿缓冲装置长度的方向正对的力进行缓冲防护,使得造成防护缓冲效果不理想的问题。
2、因此,设计一种可以对机器人进行全面缓冲防护和可以对多个方向的冲击力进行缓冲防护的机器人的防撞组件显得非常必要。
技术实现思路
1、本实用新型提供一种机器人的防撞组件,可以实现上述背景技术中提出的技术效果。
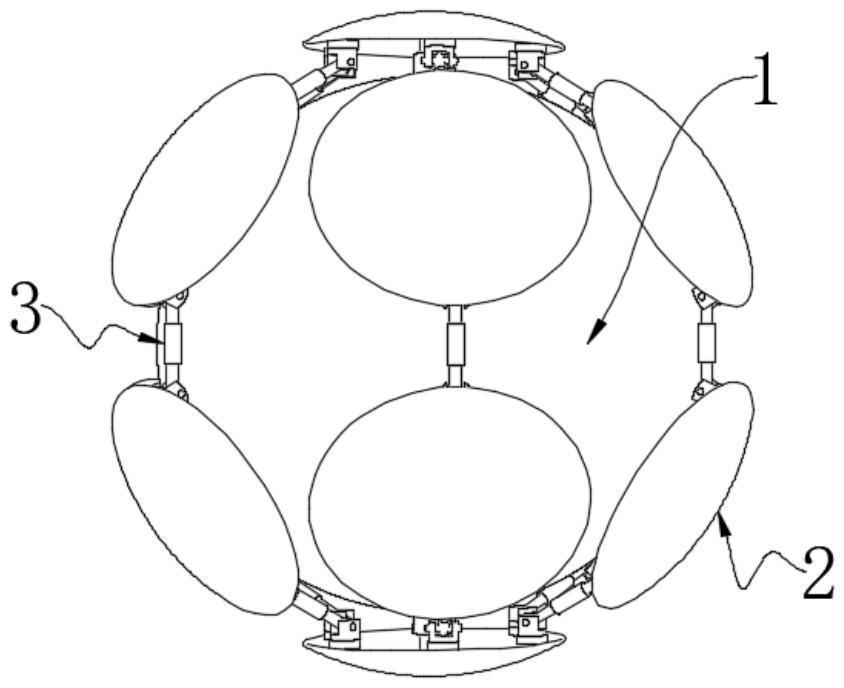
2、本实用新型提供了一种机器人的防撞组件,包括机器人本体以及设置在所述机器人本体上的防撞机构;
3、所述防撞机构包括安装孔、缓冲板、螺纹杆、缓冲套管、缓冲杆、支撑杆、连接头和缓冲弹簧,所述安装孔设置于所述机器人本体的表面,所述缓冲套管的一端通过所述螺纹杆安装于所述安装孔的内部,所述缓冲杆的一端通过所述缓冲弹簧弹性连接在所述缓冲套管的另一端内部,所述支撑杆的一端与所述缓冲杆的另一端固定连接,所述缓冲板与所述支撑杆的另一端之间设置有连接头,并通过所述连接头相连接,相邻的两个所述缓冲板之间设置有连接机构。
4、较佳地,所述连接机构包括支撑座、转动铰接耳、连接臂、连接套管、连接块和连接弹簧,所述支撑座的一端均安装在相邻的两个所述缓冲板的一端底部,所述转动铰接耳转动连接在所述支撑座的另一端,所述连接套管的内部中端固定连接有所述连接块,所述连接弹簧的一端对称固定连接在所述连接块的两侧,所述连接臂的一端转动连接在所述转动铰接耳的内侧,所述连接臂的另一端与所述连接弹簧的另一端相连接,且所述连接臂的另一端滑动连接在所述连接套管的内部。
5、较佳地,所述收纳壳内滑动连接有收纳管,所述缓冲板的顶部安装有固定螺栓,且所述固定螺栓的一端螺纹贯穿所述缓冲板的顶部与所述连接头螺纹连接。
6、较佳地,所述缓冲板均为圆盘状结构,且所述缓冲板的侧边处均为圆弧状切角。
7、较佳地,所述连接臂与所述连接套管的交接处均安装有阻尼垫。
8、本实用新型提供的有益效果是:
9、1、该机器人的防撞组件,通过在缓冲杆的一端通过缓冲弹簧弹性连接在缓冲套管的另一端内部,支撑杆的一端与缓冲杆的另一端固定连接,缓冲板与支撑杆的另一端之间设置有连接头,并通过连接头相连接,进而缓冲板首先接触到地面,且冲击力通过缓冲弹簧得到最大的缓冲,从而使得机器人本体的防护性得到提升,因缓冲板均匀分布在机器人本体的表面,从而形成了对机器人本体的全方位的保护;
10、2、该机器人的防撞组件,通过在支撑座的一端均安装在相邻的两个缓冲板的一端底部,转动铰接耳转动连接在支撑座的另一端,连接套管的内部中端固定连接有连接块,连接弹簧的一端对称固定连接在连接块的两侧,连接臂的一端转动连接在转动铰接耳的内侧,连接臂的另一端与连接弹簧的另一端相连接,且连接臂的另一端滑动连接在连接套管的内部,进而当跌落发生时或者从多个方向有撞击力时,其中缓冲板受到冲击力向内侧挤压,在连接块的作用下,使得相邻的两个缓冲板之间的连接性得到提高,从而使得跌落时,整体的架构更加稳定,且在连接弹簧的作用下,进一步地使得冲击力得到缓冲。
技术特征:
1.一种机器人的防撞组件,其特征在于:包括机器人本体(1)以及设置在所述机器人本体(1)上的防撞机构(2);
2.如权利要求1所述的一种机器人的防撞组件,其特征在于,所述连接机构(3)包括支撑座(31)、转动铰接耳(32)、连接臂(33)、连接套管(34)、连接块(35)和连接弹簧(36),所述支撑座(31)的一端均安装在相邻的两个所述缓冲板(22)的一端底部,所述转动铰接耳(32)转动连接在所述支撑座(31)的另一端,所述连接套管(34)的内部中端固定连接有所述连接块(35),所述连接弹簧(36)的一端对称固定连接在所述连接块(35)的两侧,所述连接臂(33)的一端转动连接在所述转动铰接耳(32)的内侧,所述连接臂(33)的另一端与所述连接弹簧(36)的另一端相连接,且所述连接臂(33)的另一端滑动连接在所述连接套管(34)的内部。
3.如权利要求2所述的一种机器人的防撞组件,其特征在于,所述连接臂(33)与所述连接套管(34)的交接处均安装有阻尼垫。
4.如权利要求1所述的一种机器人的防撞组件,其特征在于,所述缓冲板(22)的顶部安装有固定螺栓(221),且所述固定螺栓(221)的一端螺纹贯穿所述缓冲板(22)的顶部与所述连接头(27)螺纹连接。
5.如权利要求1所述的一种机器人的防撞组件,其特征在于,所述缓冲板(22)均为圆盘状结构,且所述缓冲板(22)的侧边处均为圆弧状切角。
技术总结
本技术公开了一种机器人的防撞组件,包括机器人本体以及设置在所述机器人本体上的防撞机构;所述防撞机构包括安装孔、缓冲板、螺纹杆、缓冲套管、缓冲杆、支撑杆、连接头和缓冲弹簧,所述安装孔设置于所述机器人本体的表面,所述缓冲套管的一端通过所述螺纹杆安装于所述安装孔的内部,所述缓冲杆的一端通过所述缓冲弹簧弹性连接在所述缓冲套管的另一端内部,所述支撑杆的一端与所述缓冲杆的另一端固定连接,所述缓冲板与所述支撑杆的另一端之间设置有连接头,并通过所述连接头相连接,相邻的两个所述缓冲板之间设置有连接机构。该技术的有益效果为可以对机器人进行全面缓冲防护和可以对多个方向的冲击力进行缓冲防护。
技术研发人员:张欣
受保护的技术使用者:米奥思(天津)科技有限公司
技术研发日:20220929
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!