一种多自由度贴合面夹取装置的制作方法
本技术涉及夹具,具体为一种多自由度贴合面夹取装置。
背景技术:
1、随着国家对能源需求量增加和对绿色能源的总体占比要求的提高,海上和陆上风力发电投资规模不断加大,风力发电应用的叶片数量也急剧上升,随着风力发电塔的高度增加,使得单台发电功率的增加,单个叶片的质量和尺寸也越来越大,为了保证安装速度,必须要有一个可靠的设备来有效的夹取叶片,传统夹取叶片的技术是依靠两台或多台起重机,通过多点定位通过夹具夹取叶片,再起吊到一定高度后安装在风电塔筒的顶部,所需起重设备的数量过多,每个起重设备的操作更加复杂,且叶片的表面多为曲面以及异形面的连续结构件,夹持面的贴合程度不高,并且由于传统夹具的接触面与异型叶片的连接面夹取不牢靠易脱落,容易损坏叶片。
技术实现思路
1、本实用新型的目的在于提供一种多自由度贴合面夹取装置,以解决上述背景技术中提出所需起重设备的数量过多,每个起重设备的操作更加复杂,且叶片的表面多为曲面以及异形面的连续结构件,夹持面的贴合程度不高,并且由于传统夹具的接触面与异型叶片的连接面夹取不牢靠易脱落,容易损坏叶片的问题。
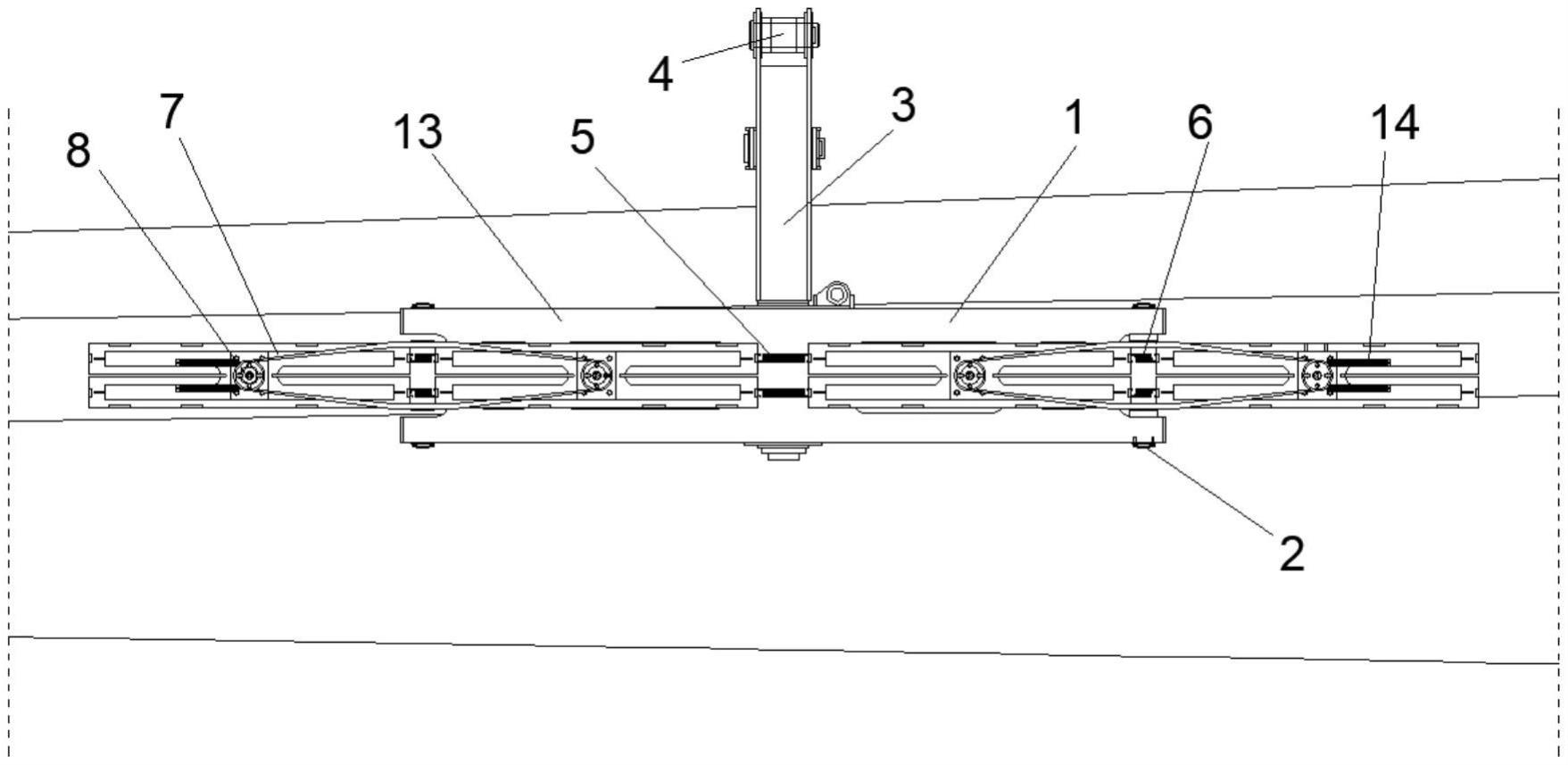
2、为实现上述目的,本实用新型提供如下技术方案:一种多自由度贴合面夹取装置,包括夹梁大臂,其设置为对称梯形板状结构,所述夹梁大臂两端对称设置有连接销,且夹梁大臂内部被连接杆一端贯穿,所述连接杆上端设置有限位销,且连接杆与夹梁大臂连接的内壁一侧与连接弹簧平行;
3、夹梁小臂,其对称设置在所述夹梁大臂内部,每组所述夹梁小臂之间设置有衔接弹簧,且衔接弹簧两端均设置有夹梁小臂一端,并且每组夹梁小臂与连接弹簧一端连接,每个所述夹梁小臂内部均设置有转接块;
4、辅助杆,其两端均与所述夹梁大臂侧壁转动连接,所述夹梁大臂通过连接销与夹梁中臂内部转动连接,且夹梁中臂两端均与1个转接块的一端连接,所述夹梁中臂一端与夹梁小臂一侧之间设置有定位弹簧。
5、采用上述技术方案,为扇叶的异型连续结构件的夹持保持稳定,提高夹取的稳定性。
6、优选的,所述夹梁大臂上端设置有伸缩杆,且伸缩杆与辅助杆平行设置,所述夹梁大臂对称设置有2个。
7、采用上述技术方案,夹梁大臂为装置整体的框架提供整体的雏形结构,便于整体的组装。
8、优选的,所述连接销贯穿夹梁中臂内部,且连接销在夹梁大臂内部转动连接。
9、采用上述技术方案,便于连接销为夹梁大臂与夹梁中臂为活动提供限位。
10、优选的,所述夹梁小臂为2个一组,且夹梁小臂横截面设置为三角形结构,所述夹梁小臂内壁转动连接有活动块。
11、采用上述技术方案,使得夹梁小臂每组之间相互配合更加贴合叶片的表面的弧形状态。
12、优选的,所述转接块转动安装在活动块内部,且转接块输出端设置有夹板,且夹板端面贯穿夹梁小臂
13、采用上述技术方案,便于连接块配合夹板为夹持扇叶表面的夹持活动,进一步提供稳定性。
14、优选的,所述夹梁中臂设置为v状的板状体结构,且夹梁中臂位于夹梁大臂内部。
15、采用上述技术方案,便于夹梁中臂为夹梁大臂与夹梁小臂之间的辅助连接定位。
16、与现有技术相比,本实用新型的有益效果是:该多自由度贴合面夹取装置:
17、1.在使用该装置时,通过装置内部的夹梁大臂在通过连接销与夹梁中臂连接,在活动块配合下使得夹梁中臂与夹梁小臂之间配合作业,通过连接杆的衔接,使得整体形成完整的长条状夹具结构,且随着连续结构件配合作业,使得夹梁大臂、夹梁中臂与夹梁小臂通用单台起重机,减少起重设备的数量降低起重设备的操作的复杂程度;
18、2.通过装置内部的夹梁大臂、夹梁中臂与夹梁小臂在连接销的配合下,对风扇叶片表面异型的角度可以自由的调整使用,更加贴合风扇叶片的弧形起伏角度,提高夹持面的贴合程度,有效保持夹持过程中贴合区域的稳定性;
19、3.通过装置内部的转接块与夹板的位置的配合作业,再辅助夹梁大臂、夹梁中臂与夹梁小臂的夹持作业,为扇叶叶片的不同的弧形面夹持提供稳定的夹持效果,减少夹取中的脱落现象,保持夹取中高效以及牢固的状态。
技术特征:
1.一种多自由度贴合面夹取装置,包括夹梁大臂(1)、夹梁小臂(7)和辅助杆(11),其特征在于:
2.根据权利要求1所述的一种多自由度贴合面夹取装置,其特征在于:所述夹梁大臂(1)上端设置有伸缩杆(12),且伸缩杆(12)与辅助杆(11)平行设置,所述夹梁大臂(1)对称设置有2个。
3.根据权利要求1所述的一种多自由度贴合面夹取装置,其特征在于:所述连接销(2)贯穿夹梁中臂(13)内部,且连接销(2)在夹梁大臂(1)内部转动连接。
4.根据权利要求1所述的一种多自由度贴合面夹取装置,其特征在于:所述夹梁小臂(7)为2个一组,且夹梁小臂(7)横截面设置为三角形结构,所述夹梁小臂(7)内壁转动连接有活动块(8)。
5.根据权利要求1所述的一种多自由度贴合面夹取装置,其特征在于:所述转接块(9)转动安装在活动块(8)内部,且转接块(9)输出端设置有夹板(10),且夹板(10)端面贯穿夹梁小臂(7)。
6.根据权利要求1所述的一种多自由度贴合面夹取装置,其特征在于:所述夹梁中臂(13)设置为v状的板状体结构,且夹梁中臂(13)位于夹梁大臂(1)内部。
技术总结
本技术公开了一种多自由度贴合面夹取装置,包括:夹梁大臂,其设置为对称梯形板状结构,所述夹梁大臂两端对称设置有连接销,且夹梁大臂内部被连接杆一端贯穿,所述连接杆上端设置有限位销,且连接杆与夹梁大臂连接的内壁一侧与连接弹簧平行;夹梁小臂,其对称设置在所述夹梁大臂内部。该多自由度贴合面夹取装置,通过装置内部的夹梁大臂在通过连接销与夹梁中臂连接,在活动块配合下使得夹梁中臂与夹梁小臂之间配合作业,通过连接杆的衔接,使得整体形成完整的长条状夹具结构,且随着连续结构件配合作业,使得夹梁大臂、夹梁中臂与夹梁小臂通用单台起重机,减少起重设备的数量降低起重设备的操作的复杂程度。
技术研发人员:丛海军
受保护的技术使用者:上海菲切尔智能科技有限公司
技术研发日:20221008
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!