一种气动拉线混合驱动人工肌肉
本技术属于康复医疗器械,具体涉及一种气动拉线混合驱动人工肌肉。
背景技术:
1、目前,应用康复领域的柔性机器人设备主要采用气动或者线驱的人工肌肉来驱动外骨骼装置。无论是气动柔性肌肉或者拉线柔性肌肉,单一的驱动方式都有一定的局限性。
2、气动柔性肌肉通常可以通过增大肌肉外壁和调整内部气压的方式来实现较大的推力,但受限于其自身的刚性与柔性材料的压缩能力,难以提供较大的拉力。拉线驱动的肌肉执行器只能提供单向的拉力,如果作用于某一转动关节,则需要在两个方向上同时布置拉线肌肉执行器。并且,拉线肌肉执行器自身结构缺乏刚性,无法作为结构支撑件使用。
3、在康复医疗领域,柔性外骨骼康复机器人既要提供足够的结构支撑,又要在关节进行主动运动时提供辅助力。现有的柔性外骨骼无法同时满足上述条件,实用性较差。
技术实现思路
1、本实用新型的主要目的在于提供一种气动拉线混合驱动人工肌肉,以解决现有的柔性外骨骼无法同时提供结构支撑和辅助力的问题。
2、为解决上述技术问题,本实用新型所采取的技术方案是:
3、一种气动拉线混合驱动人工肌肉,包括气动执行器、气压调节组件和拉线驱动组件,所述气压调节组件与气动执行器连通,用于调节所述气动执行器中的气压,以控制所述气动执行器伸展或压缩;所述拉线驱动组件的伸缩端与气动执行器的伸缩端固定连接,用于控制所述执行器压缩。
4、一种可能的实施方式中,所述气动执行器包括内伸缩管、外伸缩管、第一端盖和第二端盖,所述内伸缩管嵌套在外伸缩管内,所述内伸缩管和外伸缩管的第一端均与第一端盖密封连接,所述内伸缩管和外伸缩管的第二端均与第二端盖密封连接,以形成封闭的气腔;所述内伸缩管的内腔通过第二端盖上的中心通孔与外界大气连通;所述气压调节组件与气腔连通,所述拉线驱动组件的伸缩端与第一端盖固定连接。
5、一种可能的实施方式中,所述第二端盖上靠近第一端盖的一侧设有环形槽,所述环形槽位于内伸缩管和外伸缩管之间,并与所述气腔连通;所述第二端盖的侧壁上设有与环形槽连通的气孔,所述气压调节组件与所述气孔连通。
6、一种可能的实施方式中,所述气压调节组件包括与所述气腔连通,用于向气腔中充气的高压泵,以及与所述气腔连通,用于将气腔中空气抽出的真空泵。
7、一种可能的实施方式中,该气动拉线混合驱动人工肌肉还包括导气管组件,所述导气管组件包括主气管、第一支气管和第二支气管,所述主气管与所述气孔连通;所述高压泵通过第一支气管与主气管连通,所述第一支气管上设有高压阀;所述真空泵通过第二支气管与主气管连通,所述第二支气管上设有真空阀。
8、一种可能的实施方式中,所述导气管组件还包括第三支气管,所述第三支气管上设有泄流阀,所述主气管可通过第三支气管与外界大气连通。
9、一种可能的实施方式中,所述拉线驱动组件包括柔性拉线和卷线马达,所述柔性拉线的一端固定在卷线马达上,另一端穿过所述中心通孔后与第一端盖中心固定连接。
10、一种可能的实施方式中,所述内伸缩管和外伸缩管均为波纹管。
11、一种可能的实施方式中,所述内伸缩管和外伸缩管均为tpu材质。
12、一种可能的实施方式中,所述第一端盖和第二端盖均为玻纤增强尼龙材质。
13、采用上述技术方案所产生的有益效果在于:本实用新型中的人工肌肉采用气动与拉线双重驱动,通过利用气动执行器自身刚度较大的特点,能够为关节活动提供较大的驱动推力,同时拉线驱动组件还能提供较大的驱动拉力,有效保证了人机交互安全性,为佩戴以该人工肌肉为驱动装置的残障人士提供足够的双向助力。
技术特征:
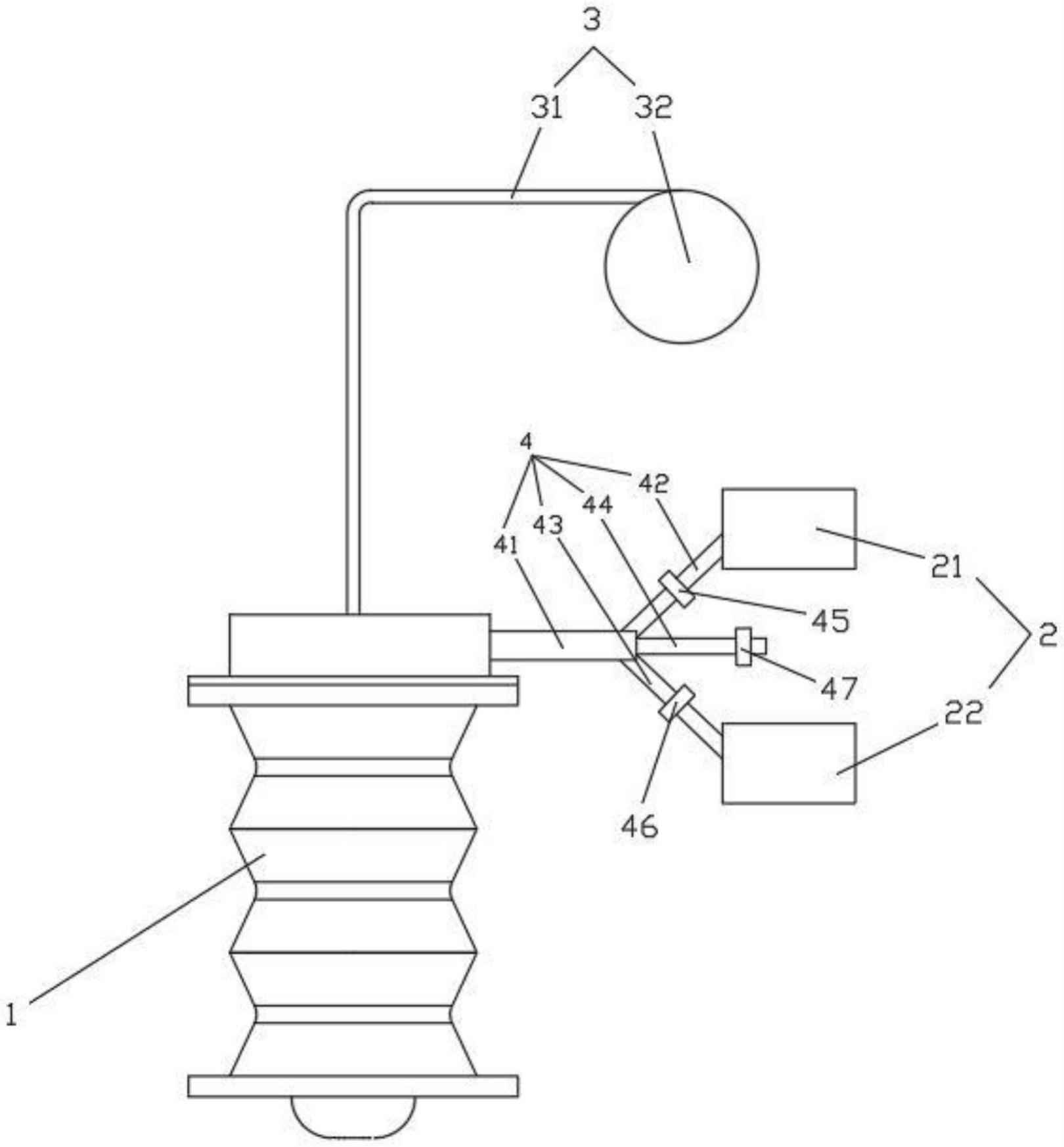
1.一种气动拉线混合驱动人工肌肉,其特征在于,包括气动执行器(1)、气压调节组件(2)和拉线驱动组件(3),所述气压调节组件(2)与气动执行器(1)连通,用于调节所述气动执行器(1)中的气压,以控制所述气动执行器(1)伸展或压缩;所述拉线驱动组件(3)的伸缩端与气动执行器(1)的伸缩端固定连接,用于控制所述执行器压缩。
2.根据权利要求1所述的一种气动拉线混合驱动人工肌肉,其特征在于,所述气动执行器(1)包括内伸缩管(11)、外伸缩管(12)、第一端盖(13)和第二端盖(14),所述内伸缩管(11)嵌套在外伸缩管(12)内,所述内伸缩管(11)和外伸缩管(12)的第一端均与第一端盖(13)密封连接,所述内伸缩管(11)和外伸缩管(12)的第二端均与第二端盖(14)密封连接,以形成封闭的气腔(15);所述内伸缩管(11)的内腔通过第二端盖(14)上的中心通孔(141)与外界大气连通;所述气压调节组件(2)与气腔(15)连通,所述拉线驱动组件(3)的伸缩端与第一端盖(13)固定连接。
3.根据权利要求2所述的一种气动拉线混合驱动人工肌肉,其特征在于,所述第二端盖(14)上靠近第一端盖(13)的一侧设有环形槽(142),所述环形槽(142)位于内伸缩管(11)和外伸缩管(12)之间,并与所述气腔(15)连通;所述第二端盖(14)的侧壁上设有与环形槽(142)连通的气孔(143),所述气压调节组件(2)与所述气孔(143)连通。
4.根据权利要求3所述的一种气动拉线混合驱动人工肌肉,其特征在于,所述气压调节组件(2)包括与所述气腔(15)连通,用于向气腔(15)中充气的高压泵(21),以及与所述气腔(15)连通,用于将气腔(15)中空气抽出的真空泵(22)。
5.根据权利要求4所述的一种气动拉线混合驱动人工肌肉,其特征在于,该气动拉线混合驱动人工肌肉还包括导气管组件(4),所述导气管组件(4)包括主气管(41)、第一支气管(42)和第二支气管(43),所述主气管(41)与所述气孔(143)连通;所述高压泵(21)通过第一支气管(42)与主气管(41)连通,所述第一支气管(42)上设有高压阀(45);所述真空泵(22)通过第二支气管(43)与主气管(41)连通,所述第二支气管(43)上设有真空阀(46)。
6.根据权利要求5所述的一种气动拉线混合驱动人工肌肉,其特征在于,所述导气管组件(4)还包括第三支气管(44),所述第三支气管(44)上设有泄流阀(47),所述主气管(41)可通过第三支气管(44)与外界大气连通。
7.根据权利要求2-6任一项所述的一种气动拉线混合驱动人工肌肉,其特征在于,所述拉线驱动组件(3)包括柔性拉线(31)和卷线马达(32),所述柔性拉线(31)的一端固定在卷线马达(32)上,另一端穿过所述中心通孔(141)后与第一端盖(13)中心固定连接。
8.根据权利要求2-6任一项所述的一种气动拉线混合驱动人工肌肉,其特征在于,所述内伸缩管(11)和外伸缩管(12)均为波纹管。
9.根据权利要求8所述的一种气动拉线混合驱动人工肌肉,其特征在于,所述内伸缩管(11)和外伸缩管(12)均为tpu材质。
10.根据权利要求8所述的一种气动拉线混合驱动人工肌肉,其特征在于,所述第一端盖和第二端盖均为玻纤增强尼龙材质。
技术总结
本技术公开了一种气动拉线混合驱动人工肌肉,包括气动执行器、气压调节组件和拉线驱动组件,气压调节组件与气动执行器连通,用于调节气动执行器中的气压,以控制气动执行器伸展或压缩;拉线驱动组件的伸缩端与气动执行器的伸缩端固定连接,用于控制执行器压缩。本技术中的人工肌肉采用气动与拉线双重驱动,通过利用气动执行器自身刚度较大的特点,能够为关节活动提供较大的驱动推力,同时拉线驱动组件还能使该人工肌肉整体提供较大的驱动拉力,柔性结构有效保证了人机交互安全性,为佩戴以该人工肌肉为驱动装置的残障人士提供足够的双向助力。
技术研发人员:胡勇,李晓东,端木德浩,王小军,曹翔
受保护的技术使用者:香港大学
技术研发日:20221026
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!