一种巡检机器人
本申请属于巡检机器人,具体涉及巡检机器人。
背景技术:
1、巡检机器人在户外变电站、工厂等场地的应用日趋广泛,以代替人做重复性、观察性乃至操作性工作。目前上述地工作开展多以人工为主,人效率高,但长期重复性作业易导致疲劳,进而影响工作准确性和可靠性,例如检查并记录仪器仪表参数等。并且特殊天气下人无法正常工作。巡检机器人代替人工作业已成为趋势,其可靠性高,搭载特殊传感器可以完成人无法完成的作业,例如红外测温,有害气体检测等。
2、目前,现有的巡检机器人户外进行工作时,经常会出现摄像头高度不便于根据现场情况进行调节而导致视野出现盲区或不清晰,使得工作人员无法进行精确定位识别,影响其巡检工作的效率,同时现有的巡检机器人多为采用四轮全驱形式,其动力强劲,越野能力强,但驱动单元多,成本高昂,摄像头等通过四轮差速转向来实现全方位进行监测,从而使得轮胎磨损严重,也不利于精确定位。
技术实现思路
1、因此,本申请要解决的技术问题在于提供一种巡检机器人,通过第一驱动件能够带动升降台在导向件上上下移动,进而可根据实际情况调节巡检机构的高度,以便于能够实现对巡检机构的高度进行控制,避免出现巡检机构在巡检过程中被障碍物遮挡视野而出现盲区或不清晰的现象,使工作人员能够对巡检目标精确定位识别;通过转向部的设置,实现巡检机构进行全方位的观察监测,避免通过机器人本体四轮差速转向而造成轮胎的磨损,大大降低其成本并也提高巡检机器人巡检工作的效率。
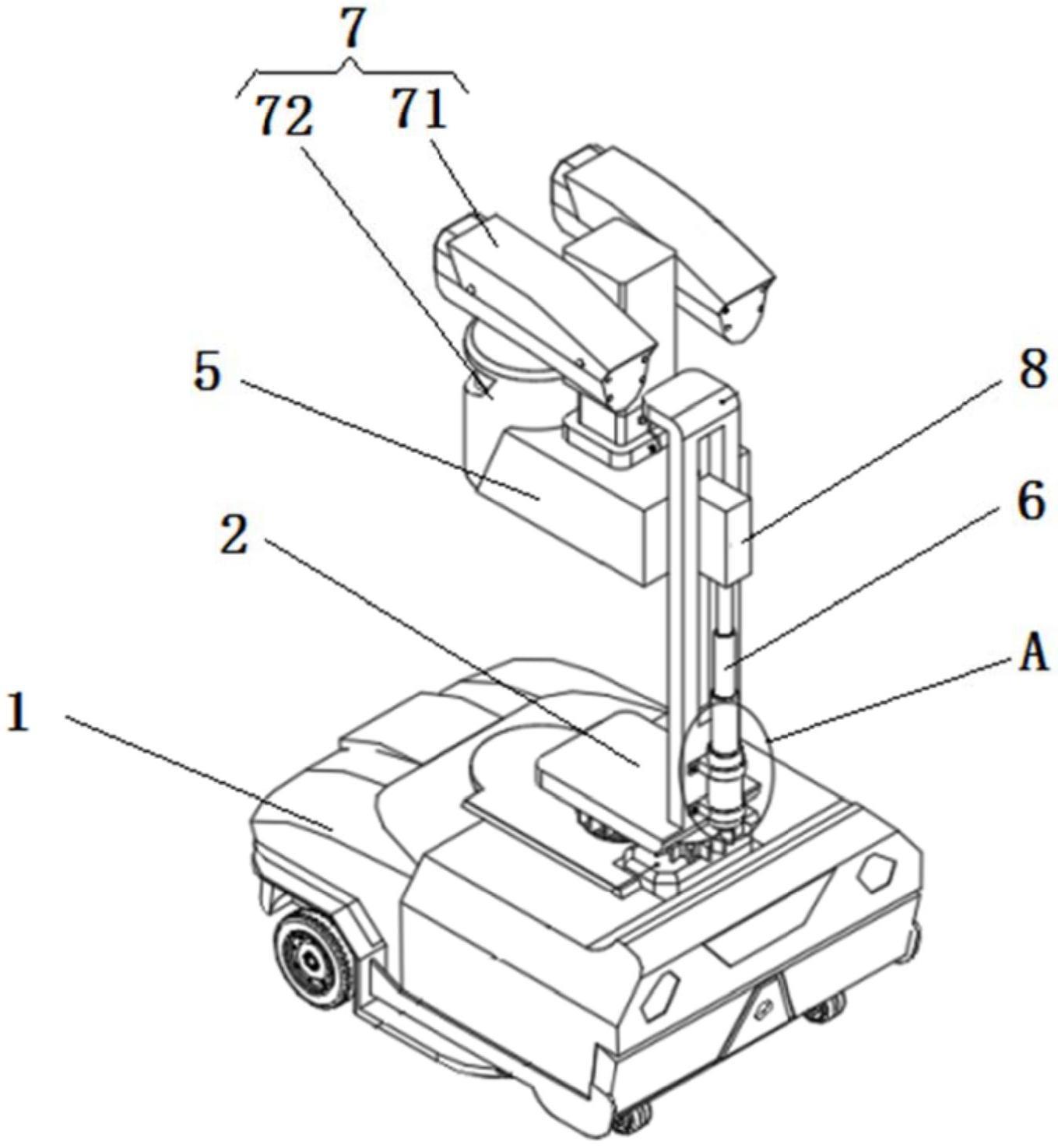
2、为了解决上述问题,本申请提供一种巡检机器人,包括机器人本体、安装架、转向部、导向件、升降台、第一驱动件及巡检机构;
3、所述转向部设置于所述机器人本体与所述安装架之间,用于带动所述安装架水平转动,所述安装架顶壁与底壁之间设置有导向件,所述升降台与所述导向件相连接,所述第一驱动件设置于所述安装架上,所述第一驱动件用于带动所述升降台沿所述导向件进行上下移动,所述巡检机构设置于所述升降台上。
4、可选的,还包括移动块,所述安装架上开设有限位孔,所述移动块滑动设置于所述限位孔内,所述移动块第一端与所述升降台相连接,所述移动块第二端底部与所述第一驱动件驱动端相连接。
5、可选的,所述导向件为导向柱。
6、可选的,所述转向部包括:第二驱动件、第一齿轮、连接杆及第二齿轮;
7、所述第二驱动件设置于所述机器人本体内,所述第一齿轮设置于所述第二驱动件输出端上,所述连接杆设置于所述机器人本体与所述安装架之间,所述第二齿轮设置于所述连接杆上,所述第一齿轮与所述第二齿轮啮合连接。
8、可选的,所述连接杆第一端与所述机器人本体转动连接,所述连接杆第二端与所述安装架固定连接。
9、可选的,所述连接杆第一端与所述机器人本体之间通过轴承连接。
10、可选的,所述机器人本体顶部开设有安装槽,所述第二驱动件设置于所述安装槽内。
11、可选的,所述第一驱动件为电动推杆;所述第二驱动件为驱动电机。
12、可选的,还包括环箍,所述第一驱动件通过若干环箍固定于所述安装架上。
13、可选的,所述巡检机构包括红外摄像头和激光雷达,所述红外摄像头设置于所述升降台上,所述激光雷达设置于所述升降台上,所述激光雷达位于所述红外摄像头一侧。
14、有益效果
15、本实用新型的实施例中所提供的一种巡检机器人,优点在于:
16、1、通过第一驱动件能够带动升降台在导向件上上下移动,进而可根据实际情况调节巡检机构的高度,以便于能够实现对巡检机构的高度进行控制,避免出现巡检机构在巡检过程中被障碍物遮挡视野而出现盲区或不清晰的现象,使工作人员能够对巡检目标精确定位识别。
17、2、通过转向部的设置,实现巡检机构进行全方位的观察监测,避免通过机器人本体四轮差速转向而造成轮胎的磨损,大大降低其成本并也提高巡检机器人巡检工作的效率。
技术特征:
1.一种巡检机器人,其特征在于,包括机器人本体(1)、安装架(2)、转向部(3)、导向件(4)、升降台(5)、第一驱动件(6)及巡检机构(7);
2.根据权利要求1所述的巡检机器人,其特征在于,还包括移动块(8),所述安装架(2)上开设有限位孔,所述移动块(8)滑动设置于所述限位孔内,所述移动块(8)第一端与所述升降台(5)相连接,所述移动块(8)第二端底部与所述第一驱动件(6)驱动端相连接。
3.根据权利要求1所述的巡检机器人,其特征在于,所述导向件(4)为导向柱。
4.根据权利要求1所述的巡检机器人,其特征在于,所述连接杆(33)第一端与所述机器人本体(1)转动连接,所述连接杆(33)第二端与所述安装架(2)固定连接。
5.根据权利要求4所述的巡检机器人,其特征在于,所述连接杆(33)第一端与所述机器人本体(1)之间通过轴承连接。
6.根据权利要求5所述的巡检机器人,其特征在于,所述机器人本体(1)顶部开设有安装槽,所述第二驱动件(31)设置于所述安装槽内。
7.根据权利要求6所述的巡检机器人,其特征在于,所述第一驱动件(6)为电动推杆;所述第二驱动件(31)为驱动电机。
8.根据权利要求1所述的巡检机器人,其特征在于,还包括环箍(9),所述第一驱动件(6)通过若干环箍(9)固定于所述安装架(2)上。
9.根据权利要求1所述的巡检机器人,其特征在于,所述巡检机构(7)包括红外摄像头(71)和激光雷达(72),所述红外摄像头(71)设置于所述升降台(5)上,所述激光雷达(72)设置于所述升降台(5)上,所述激光雷达(72)位于所述红外摄像头(71)一侧。
技术总结
本申请提供了一种巡检机器人,包括机器人本体、安装架、转向部、导向件、升降台、第一驱动件及巡检机构;所述转向部设置于所述机器人本体与所述安装架之间,用于带动所述安装架水平转动,所述安装架顶壁与底壁之间设置有导向件,所述升降台与所述导向件相连接,所述第一驱动件设置于所述安装架上,所述第一驱动件用于带动所述升降台沿所述导向件进行上下移动,所述巡检机构设置于所述升降台上;本技术通过第一驱动件能够带动升降台在导向件上上下移动,进而可根据实际情况调节巡检机构的高度,以便于能够实现对巡检机构的高度进行控制;通过转向部的设置,实现巡检机构进行全方位的观察监测。
技术研发人员:于德源,刘金海,闫锐,张天宝,刘永策,许阿敏,刘殊彤
受保护的技术使用者:东北大学
技术研发日:20221104
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!