一种自动锥桶收放车用机械抓手的制作方法
本技术涉及一种高速公路维护保养行业专用车领域,具体涉及一种自动交通锥桶收放车用的交通锥机械抓手。
背景技术:
1、高速公路日常养护内容多、频次高。检测到不达标的路面时需要维修,随着人民物质水平提高,机动车使用量增加以及物流高速发展,当下高速路面的维修频次逐渐升高。在高速公路执行维修保养施工工程时,需要将维修路段临时封闭,保护施工设备以及施工人员人身安全,其常用方法是人工摆放交通锥桶以引导车流,人工摆放开始阶段以及回收结束阶段施工人员和设备是暴露在危险地环境中,其次长距离的摆放劳动强度高,在机械化智能化信息化以及人口老龄化的当下难以吸引到年轻人加入,劳动力的成本高。因此设计一种自动交通锥摆放收集车是有必要,同时也是迫切的。
2、比如,2021年8月19日公布的一份名为“自动交通锥桶收放车”、申请号为“2021106539097”的中国实用新型专利申请中就记载了一种自动交通锥摆放收集车,其中为了实现对锥桶的转运,需要在锥桶收放车设置一机械抓手,比如名为“交通锥桶抓手机构”、申请号为“202121309389x”的中国实用新型专利所示,但此类机械抓手与锥桶的接触面积小,精度要求较高,对此,如何更好的完成锥桶的转运,如何对现有的机械抓手进行改良,就成为了本领域技术人员亟待解决的技术问题。
技术实现思路
1、本实用新型针对以上问题,提出了一种自动锥桶收放车用机械抓手,能够实现将交通锥在两个相对固定的位置之间运输,运输过程中交通锥为平动,运输动作稳定、运输效果好。
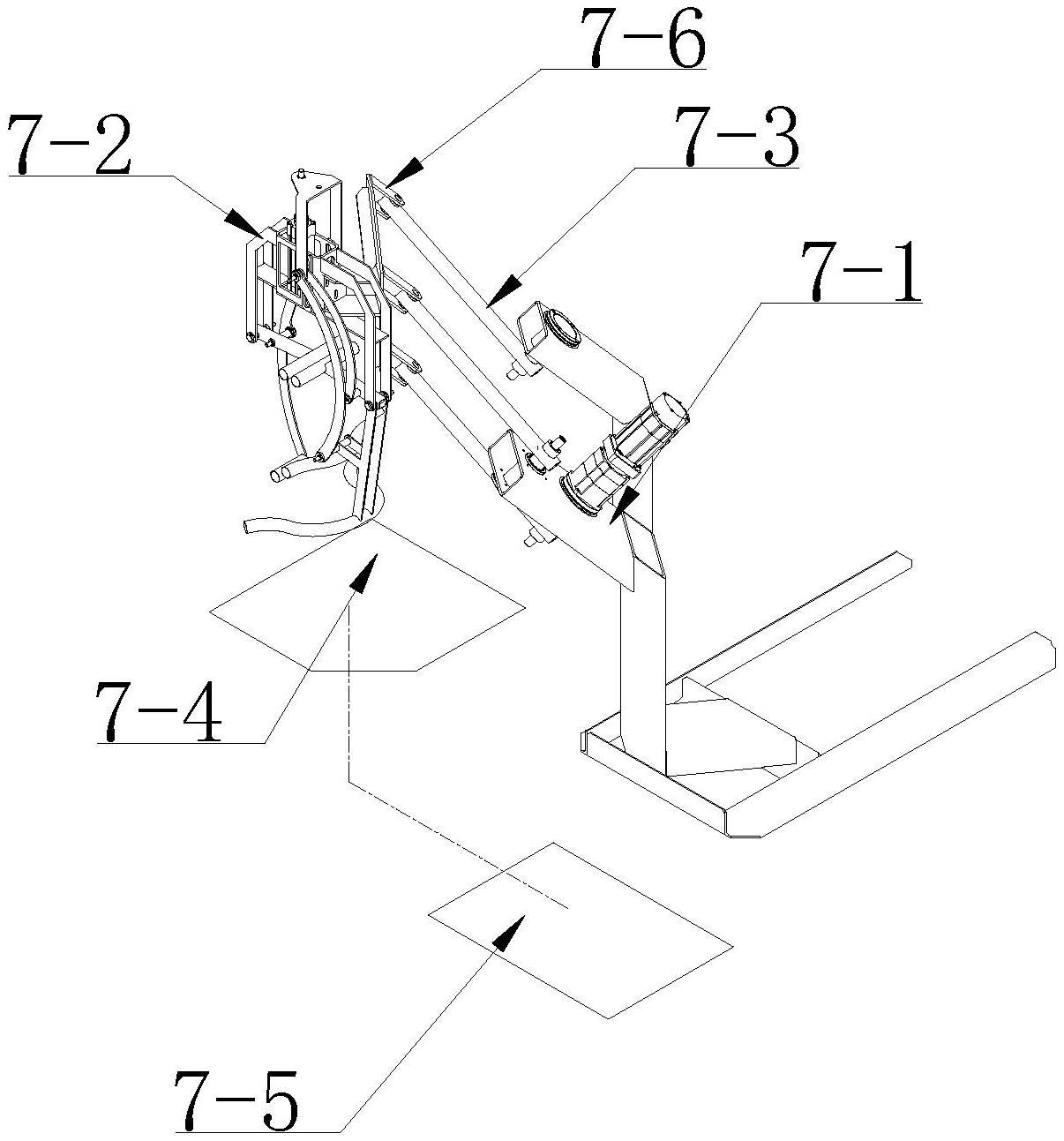
2、本实用新型的技术方案为:所述机械抓手包括抓手架7-1、外抓手7-2、抓手连杆7-3以及连杆架7-6,通过机械抓手抓取交通锥桶在第一平面7-4和第二平面7-5之间进行转运;所述连杆架7-6通过抓手连杆7-3连接在抓手架7-1上,所述外抓手7-2则连接在连杆架7-6上;所述抓手架7-1中设有用于驱动抓手连杆7-3摆动的旋转驱动机构;
3、所述外抓手7-2包括夹爪架7-21、爪滑块7-22、爪连杆7-23、夹爪7-24以及维稳杆7-25;所述夹爪架7-21固定连接在连杆架7-6上,所述爪滑块7-22通过升降驱动机构连接在夹爪架7-21上,所述夹爪7-24具有两个,两个夹爪7-24对称的设置在夹爪架7-21之下,并且夹爪7-24的根部与夹爪架7-21铰接,所述维稳杆7-25的根部也与夹爪架7-21铰接;
4、所述爪连杆7-23具有三个,三个爪连杆7-23的顶端都与爪滑块7-22铰接,其中两个爪连杆7-23的底端铰接在两个夹爪7-24的中部,另外一个爪连杆7-23的底端则铰接维稳杆7-25的中部。
5、进一步的,在所述夹爪架7-21的上部开设有平行于升降驱动机构的竖直滑槽,所述爪滑块7-22通过一根铰接轴同时与三个爪连杆7-23铰接,所述铰接轴滑动连接在所述竖直滑槽中。
6、进一步的,所述夹爪7-24包括杆部以及夹持部,所述杆部的一端与夹爪架7-21铰接,并且另一端与夹持部连为一体,从而在两个夹持部之间形成夹持区域,所述杆部的中部与其中一个爪连杆7-23的底端铰接。
7、进一步的,所述维稳杆7-25包括连接杆、上维稳杆以及下维稳杆,所述连接杆根部与夹爪架7-21铰接,并且连接杆的中部与其中一个爪连杆7-23的底端铰接,所述上维稳杆以及下维稳杆分别固定连接在连接杆的中部以及底部,上维稳杆以及下维稳杆均呈弧形,并且朝向两个夹爪7-24之间的区域设置。
8、进一步的,所述维稳杆7-25与其中一个夹爪7-24处在同一侧,另一个夹爪7-24所连接的爪连杆7-23 底端还具有延伸部,所述延伸部的底端固定连接有对向维稳杆。
9、进一步的,所述抓手连杆7-3具有至少两个,所有的抓手连杆7-3相互平行,所述抓手连杆7-3的一端与抓手架7-1铰接,并且另一端与连杆架7-6铰接,所述旋转驱动机构固定连接在抓手架7-1上,并且与其中一个抓手连杆7-3保持联动,从而驱动抓手连杆7-3往复摆动,以带动连杆架7-6往复平移。
10、本实用新型中由于多个抓手连杆的设计,使得抓手架可以在旋转驱动机构的带动下平移;并且本案中的夹爪包括杆部以及夹持部可显著增加两个夹爪与锥桶上部的接触面积,使得锥桶可以更好、更稳定的被夹持。从整体上来说,本案能够完成交通锥桶在第一平面和第二平面之间的稳定转运,对于锥桶的夹持效果更好,对于锥桶的转运更为稳定,相较于传统的机械抓手,具有更好的实际使用效果。
技术特征:
1.一种自动锥桶收放车用机械抓手,其特征在于,所述机械抓手包括抓手架(7-1)、外抓手(7-2)、抓手连杆(7-3)以及连杆架(7-6),通过机械抓手抓取交通锥桶在第一平面(7-4)和第二平面(7-5)之间进行转运;所述连杆架(7-6)通过抓手连杆(7-3)连接在抓手架(7-1)上,所述外抓手(7-2)则连接在连杆架(7-6)上;所述抓手架(7-1)中设有用于驱动抓手连杆(7-3)摆动的旋转驱动机构;
2.根据权利要求1所述的一种自动锥桶收放车用机械抓手,其特征在于,在所述夹爪架(7-21)的上部开设有平行于升降驱动机构的竖直滑槽,所述爪滑块(7-22)通过一根铰接轴同时与三个爪连杆(7-23)铰接,所述铰接轴滑动连接在所述竖直滑槽中。
3.根据权利要求1所述的一种自动锥桶收放车用机械抓手,其特征在于,所述夹爪(7-24)包括杆部以及夹持部,所述杆部的一端与夹爪架(7-21)铰接,并且另一端与夹持部连为一体,从而在两个夹持部之间形成夹持区域,所述杆部的中部与其中一个爪连杆(7-23)的底端铰接。
4.根据权利要求1所述的一种自动锥桶收放车用机械抓手,其特征在于,所述维稳杆(7-25)包括连接杆、上维稳杆以及下维稳杆,所述连接杆根部与夹爪架(7-21)铰接,并且连接杆的中部与其中一个爪连杆(7-23)的底端铰接,所述上维稳杆以及下维稳杆分别固定连接在连接杆的中部以及底部,上维稳杆以及下维稳杆均呈弧形,并且朝向两个夹爪(7-24)之间的区域设置。
5.根据权利要求1所述的一种自动锥桶收放车用机械抓手,其特征在于,所述维稳杆(7-25)与其中一个夹爪(7-24)处在同一侧,另一个夹爪(7-24)所连接的爪连杆(7-23) 底端还具有延伸部,所述延伸部的底端固定连接有对向维稳杆。
6.根据权利要求1-5任一所述的一种自动锥桶收放车用机械抓手,其特征在于,所述抓手连杆(7-3)具有至少两个,所有的抓手连杆(7-3)相互平行,所述抓手连杆(7-3)的一端与抓手架(7-1)铰接,并且另一端与连杆架(7-6)铰接,所述旋转驱动机构固定连接在抓手架(7-1)上,并且与其中一个抓手连杆(7-3)保持联动,从而驱动抓手连杆(7-3)往复摆动,以带动连杆架(7-6)往复平移。
技术总结
本技术公开了一种自动锥桶收放车用机械抓手,涉及一种高速公路维护保养行业专用车领域。能够实现将交通锥在两个相对固定的位置之间运输,运输过程中交通锥为平动,运输动作稳定、运输效果好。所述机械抓手包括抓手架、外抓手、抓手连杆以及连杆架,通过机械抓手抓取交通锥桶在第一平面和第二平面之间进行转运;所述外抓手包括夹爪架、爪滑块、爪连杆、夹爪以及维稳杆;所述夹爪架固定连接在连杆架上,所述爪滑块通过升降驱动机构连接在夹爪架上;所述爪连杆具有三个,三个爪连杆的顶端都与爪滑块铰接,其中两个爪连杆的底端铰接在两个夹爪的中部,另外一个爪连杆的底端则铰接维稳杆的中部。对于锥桶的夹持效果更好,对于锥桶的转运更为稳定。
技术研发人员:施伟斌,孙莉,张道忠,万良钢
受保护的技术使用者:南京英达公路养护车制造有限公司
技术研发日:20221109
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!