一种具有调整结构的桁架机械手的制作方法
本技术涉及机械手领域,尤其涉及一种具有调整结构的桁架机械手。
背景技术:
1、桁架机械手是一种建立在直角x,y,z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其控制核心通过工业控制器实现。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成x,y,z三轴之间的联合运动,以此实现一整套的全自动作业流程。
2、传统桁架机械手在对不同大小以及形状的工件进行夹持时需要更换相对应的夹爪进行抓取,由于机械手与桁架之间有机械连接以及电性连接,这就导致机械手的更换非常繁琐,耽误较多时间,降低了工作效率。
3、因此,有必要提供一种具有调整结构的桁架机械手解决上述技术问题。
技术实现思路
1、本实用新型提供一种具有调整结构的桁架机械手,解决了现有桁架机械手难以进行调整的问题。
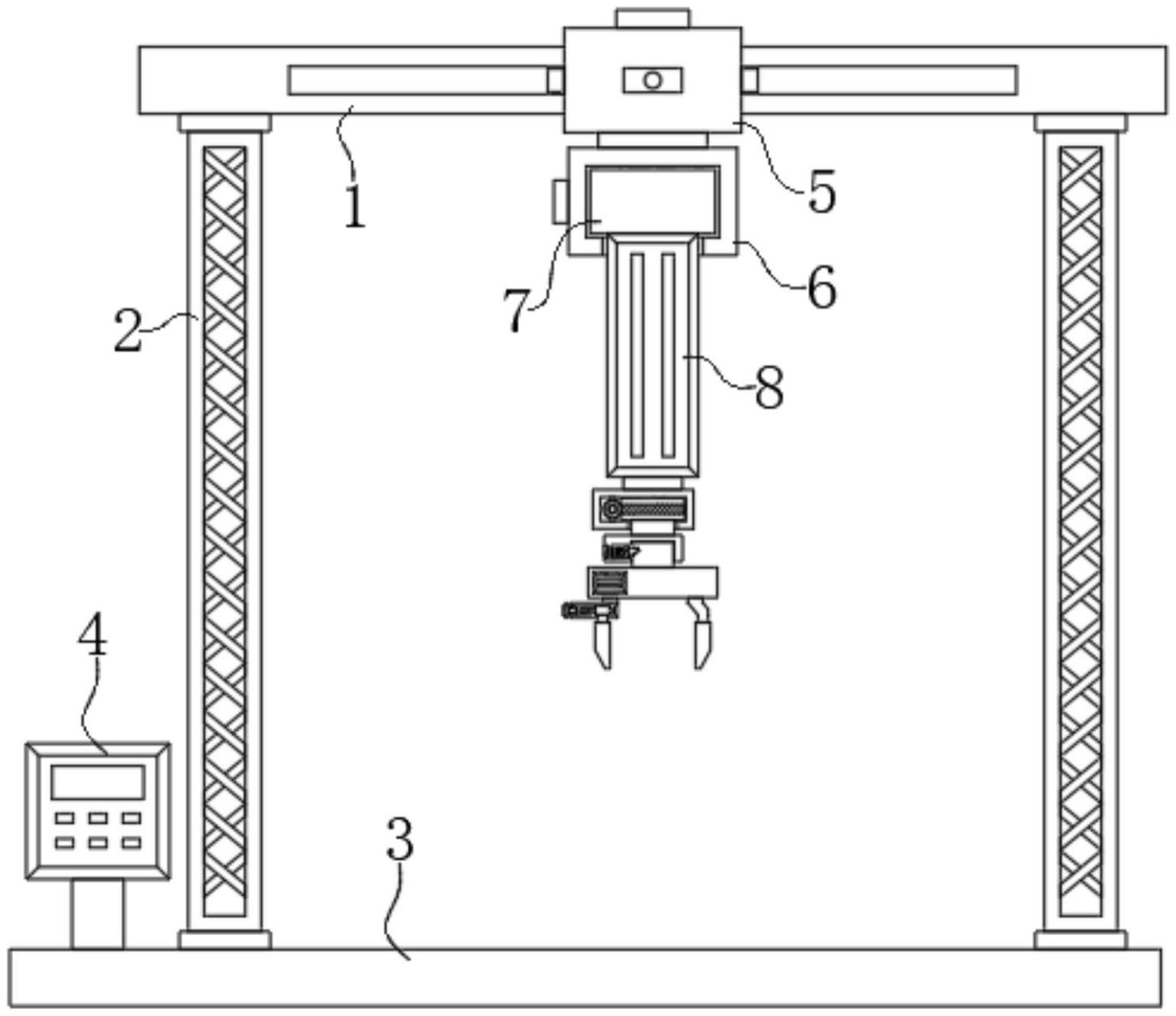
2、为解决上述技术问题,本实用新型提供的一种具有调整结构的桁架机械手,包括横板、桁架、底板和控制器,所述横板固定安装于桁架的顶部,所述控制器固定安装于底板的左侧,所述横板的外部安装有横滑台,所述横滑台的底部固定连接有纵板,所述纵板的内部滑动安装有纵滑台,所述纵滑台的底部固定安装有电动伸缩杆,所述电动伸缩杆的输出轴固定连接有固定板,所述固定板的内部转动安装有相互啮合的蜗轮与蜗杆,所述蜗杆贯穿于固定板的内壁且与外部转动机构固定相连,所述蜗轮的底部固定连接有连接板,所述连接板的底部固定连接有固定架,所述固定架的下方连接有夹持机构。
3、优选的,所述固定架的内部开设有舱室且滑动安装有拉杆,所述拉杆的内端固定连接有卡块,所述拉杆的外部套设有弹簧,所述夹持机构的上端开设有与卡块大小相适配的卡槽,所述卡块与夹持机构之间为活动插接。
4、优选的,所述固定架的侧面开设有凹槽,所述拉杆的外端固定连接有拉环,且拉环内嵌于固定架的凹槽内。
5、优选的,所述夹持机构的下方有两组夹板,其中一组所述夹板的上端固定连接有连接套,所述连接套套设于螺杆的外侧,所述螺杆水平且转动安装于固定框的内部,所述固定框固定安装于夹持机构的下方。
6、优选的,所述夹板的内侧设置有橡胶垫。
7、优选的,所述横滑台、纵滑台以及电动伸缩杆均通过接触式导电块电性连通。
8、与相关技术相比较,本实用新型提供的一种具有调整结构的桁架机械手具有如下有益效果:
9、本实用新型提供的一种具有调整结构的桁架机械手,该桁架机械手通过设置蜗轮和蜗杆可对夹持机构的夹持方向进行调节,在夹持不同形状的工件时无需对夹持机构进行更换,具有省时省力,且调节速度快的优点,通过设置拉杆、卡块和弹簧配合对夹持机构进行固定可便于后续夹持机构的更换检修,通过设置螺杆和连接套可对其中一组夹板的位置进行调节,从而改变两组夹板之间的间距,便于对宽度较大或较小的工件进行快速夹持。
技术特征:
1.一种具有调整结构的桁架机械手,包括横板(1)、桁架(2)、底板(3)和控制器(4),其特征在于:所述横板(1)固定安装于桁架(2)的顶部,所述控制器(4)固定安装于底板(3)的左侧,所述横板(1)的外部安装有横滑台(5),所述横滑台(5)的底部固定连接有纵板(6),所述纵板(6)的内部滑动安装有纵滑台(7),所述纵滑台(7)的底部固定安装有电动伸缩杆(8),所述电动伸缩杆(8)的输出轴固定连接有固定板(9),所述固定板(9)的内部转动安装有相互啮合的蜗轮(10)与蜗杆(11),所述蜗杆(11)贯穿于固定板(9)的内壁且与外部转动机构固定相连,所述蜗轮(10)的底部固定连接有连接板(12),所述连接板(12)的底部固定连接有固定架(14),所述固定架(14)的下方连接有夹持机构(13)。
2.根据权利要求1所述的一种具有调整结构的桁架机械手,其特征在于,所述固定架(14)的内部开设有舱室且滑动安装有拉杆(15),所述拉杆(15)的内端固定连接有卡块(16),所述拉杆(15)的外部套设有弹簧(17),所述夹持机构(13)的上端开设有与卡块(16)大小相适配的卡槽,所述卡块(16)与夹持机构(13)之间为活动插接。
3.根据权利要求2所述的一种具有调整结构的桁架机械手,其特征在于,所述固定架(14)的侧面开设有凹槽,所述拉杆(15)的外端固定连接有拉环,且拉环内嵌于固定架(14)的凹槽内。
4.根据权利要求1所述的一种具有调整结构的桁架机械手,其特征在于,所述夹持机构(13)的下方有两组夹板(18),其中一组所述夹板(18)的上端固定连接有连接套(19),所述连接套(19)套设于螺杆(20)的外侧,所述螺杆(20)水平且转动安装于固定框(21)的内部,所述固定框(21)固定安装于夹持机构(13)的下方。
5.根据权利要求4所述的一种具有调整结构的桁架机械手,其特征在于,所述夹板(18)的内侧设置有橡胶垫。
6.根据权利要求1所述的一种具有调整结构的桁架机械手,其特征在于,所述横滑台(5)、纵滑台(7)以及电动伸缩杆(8)均通过接触式导电块电性连通。
技术总结
本技术提供一种具有调整结构的桁架机械手。包括横板、桁架、底板和控制器,所述横板固定安装于桁架的顶部,所述控制器固定安装于底板的左侧,所述横板的外部安装有横滑台,所述横滑台的底部固定连接有纵板。本技术提供的一种具有调整结构的桁架机械手,该桁架机械手通过设置蜗轮和蜗杆可对夹持机构的夹持方向进行调节,在夹持不同形状的工件时无需对夹持机构进行更换,具有省时省力,且调节速度快的优点,通过设置拉杆、卡块和弹簧配合对夹持机构进行固定可便于后续夹持机构的更换检修,通过设置螺杆和连接套可对其中一组夹板的位置进行调节,从而改变两组夹板之间的间距,便于对宽度较大或较小的工件进行快速夹持。
技术研发人员:张全华
受保护的技术使用者:青岛勇创信自动化机械有限公司
技术研发日:20221118
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!