一种夹爪机构的制作方法
本申请涉及机械自动化领域,具体涉及一种夹爪机构。
背景技术:
1、在自动化生产线上,工厂的生产流程上使用夹爪夹持产品的情况较为普遍。然而,现阶段的夹爪通常由刚性材质制成,在对部分产品进行生产加工时存在夹伤或划伤产品表面的问题,导致生产良率降低,长久以往会给生产企业造成一定程度上的经济损失。
2、具体来说,针对柔性环状产品,为防止产品在夹持过程中发生掉落,刚性材质的夹爪的力度往往较大,容易对柔性环状产品的表面造成夹伤或划伤,因此发明一种针对柔性环状产品的夹爪机构显得非常必要。
技术实现思路
1、针对上述技术问题,本申请提供一种夹爪机构,旨在解决现有夹爪容易夹伤柔性环状产品的问题。
2、为实现上述目的,本申请采用了如下技术方案:
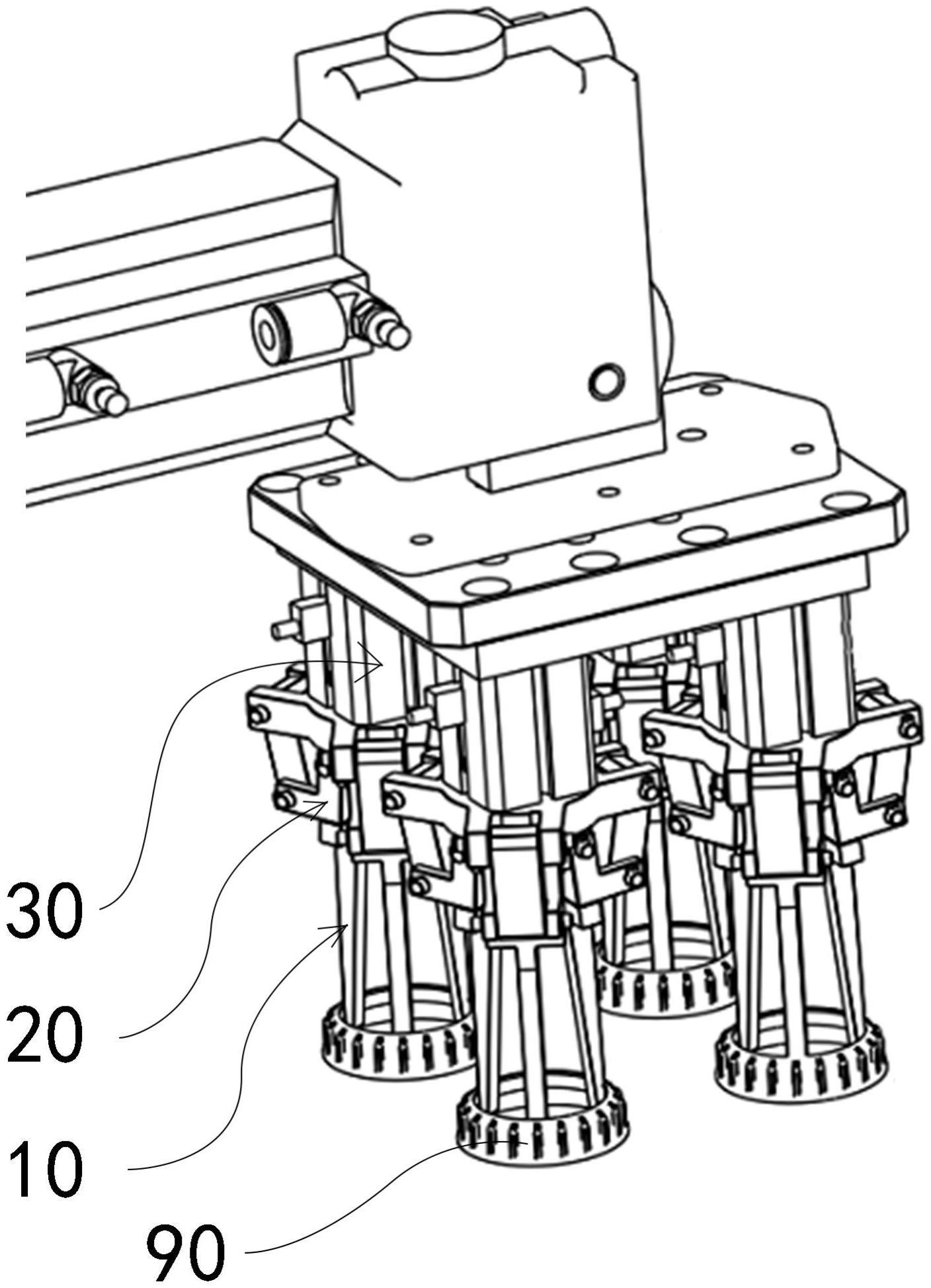
3、本申请提供一种夹爪机构,适用于柔性环状产品,包括夹爪、连杆结构以及气缸,所述夹爪和所述连杆结构均有多个并对应设置,任一所述夹爪通过对应的所述连杆结构连接所述气缸,所述气缸同时驱使各所述连杆结构运动以使各所述夹爪相互靠拢或远离;所述夹爪为柔性件,在各所述夹爪相互靠拢时能够插接所述柔性环状产品,并在相互远离时抵接所述柔性环状产品的内环面以夹持所述柔性环状产品。
4、可选地,各所述连杆结构均包括底座、第一连杆和第二连杆,所述第一连杆具有与所述气缸铰接的第一铰接点和与所述第二连杆铰接的第二铰接点,所述第二连杆具有与所述底座铰接的第三铰接点,所述夹爪装设在所述第一连杆上;
5、所述气缸驱使所述第一铰接点沿多个所述夹爪的中心轴线在第一位置和第二位置之间往复移动,所述第一铰接点从所述第一位置移动至所述第二位置时,各所述夹爪相对所述中心轴线向外偏转而相互远离,所述第一铰接点从所述第二位置移动至所述第一位置时,各所述夹爪向所述中心轴线偏转而相互靠拢。
6、可选地,所述第一连杆包括一体设置的第一连段和第二连段,所述第一连段背离所述第二连段的端点为所述第一铰接点,所述第二连段背离所述第一连段的端点为第二铰接点,所述第一连段和所述第二连段的连接位置向背离所述中心轴线的方向偏离所述第一铰接点和第三铰接点的连线,所述夹爪设于所述第二连段。
7、可选地,所述夹爪位于所述第一连段的延伸线上。
8、可选地,所述气缸包括缸体和连接所述缸体的伸缩杆,所述伸缩杆铰接所述第一铰接点并驱使所述第一铰接点在所述第一位置和所述第二位置之间往复运动,所述底座设于所述缸体的外侧。
9、可选地,各所述底座一体设置。
10、可选地,所述伸缩杆背离所述缸体的端部设有连接块,所述连接块具有多个并分别与各所述第一连杆铰接。
11、可选地,所述夹爪为t形结构。
12、可选地,所述夹爪背离所述中心轴线的一侧设有防滑纹。
13、可选地,多个所述夹爪的数量至少为三个。
14、本申请的夹爪机构通过柔性夹爪、连杆结构以及气缸的协作配合,能够有效地解决在夹取柔性环状产品容易夹伤或划伤其表面的问题,提高了生产良率的同时,还降低了生产企业的经济损失。
技术特征:
1.一种夹爪机构,适用于柔性环状产品,其特征在于,包括夹爪、连杆结构以及气缸,所述夹爪和所述连杆结构均有多个并对应设置,任一所述夹爪通过对应的所述连杆结构连接所述气缸,所述气缸同时驱使各所述连杆结构运动以使各所述夹爪相互靠拢或远离;所述夹爪为柔性件,在各所述夹爪相互靠拢时能够插接所述柔性环状产品,并在相互远离时抵接所述柔性环状产品的内环面以夹持所述柔性环状产品。
2.根据权利要求1所述的夹爪机构,其特征在于,各所述连杆结构均包括底座、第一连杆和第二连杆,所述第一连杆具有与所述气缸铰接的第一铰接点和与所述第二连杆铰接的第二铰接点,所述第二连杆具有与所述底座铰接的第三铰接点,所述夹爪装设在所述第一连杆上;
3.根据权利要求2所述的夹爪机构,其特征在于,所述第一连杆包括一体设置的第一连段和第二连段,所述第一连段背离所述第二连段的端点为所述第一铰接点,所述第二连段背离所述第一连段的端点为第二铰接点,
4.根据权利要求3所述的夹爪机构,其特征在于,所述夹爪位于所述第一连段的延伸线上。
5.根据权利要求3所述的夹爪机构,其特征在于,所述气缸包括缸体和连接所述缸体的伸缩杆,所述伸缩杆铰接所述第一铰接点并驱使所述第一铰接点在所述第一位置和所述第二位置之间往复运动,所述底座设于所述缸体的外侧。
6.根据权利要求5所述的夹爪机构,其特征在于,各所述底座一体设置。
7.根据权利要求6所述的夹爪机构,其特征在于,所述伸缩杆背离所述缸体的端部设有连接块,所述连接块具有多个并分别与各所述第一连杆铰接。
8.根据权利要求1所述的夹爪机构,其特征在于,所述夹爪为t形结构。
9.根据权利要求2所述的夹爪机构,其特征在于,所述夹爪背离所述中心轴线的一侧设有防滑纹。
10.根据权利要求1所述的夹爪机构,其特征在于,多个所述夹爪的数量至少为三个。
技术总结
本申请公开了一种夹爪机构,适用于柔性环状产品,包括夹爪、连杆结构以及气缸,夹爪和连杆结构均有多个并对应设置,任一夹爪通过对应的连杆结构连接气缸,气缸同时驱使各连杆结构运动以使各夹爪相互靠拢或远离;夹爪为柔性件,在各夹爪相互靠拢时能够插接柔性环状产品,并在相互远离时抵接柔性环状产品的内环面以夹持柔性环状产品。本申请的夹爪机构通过柔性夹爪、连杆结构以及气缸的协作配合,能够有效地解决在夹取柔性环状产品容易夹伤或划伤其表面的问题,提高了生产良率的同时,还降低了生产企业的经济损失。
技术研发人员:丁婉婉,张辉,程帅,张建国
受保护的技术使用者:赫比(上海)家用电器产品有限公司
技术研发日:20221121
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!