一种关节连接结构及协作机器人的制作方法
本技术涉及机械设备,尤其涉及一种关节连接结构及协作机器人。
背景技术:
1、随着机器人行业的飞速发展,目前协作机器人已经被应用于社会上的各行各业,市场对机器人的需求量也日益增多。机器人由于其结构复杂,导致装配周期较长,因此在保证质量的前提下提高装配效率对于生产企业来说会带来更高的收益。
2、现有的协作机器人关节连接通常是外六角螺钉穿过法兰轴锁在下一个关节外壳上,第一个关节外壳与法兰轴之间需留有一端空隙用来伸入外六角扳手,此缝隙有漏油或其他污染物的风险,并且由于空间限制需要分次把每颗螺钉锁紧一段距离,最后同步锁紧,这样的装配工艺比较麻烦。同时锁紧螺钉后此空隙需要用塑料过渡环或橡胶环填补,关节运动时塑料过渡环或橡胶环会和第一个关节外壳内壁及法兰轴端面发生摩擦,易发生磨损掉粉掉屑的情况,掉屑会从机器人关节连接处飘出进而影响工作环境的洁净度等级。因此,有必要提供一种关节连接结构,来解决上述问题。
技术实现思路
1、为了解决上述问题,本实用新型提供了一种关节连接结构,包括第一关节、连接法兰和第二关节,所述第一关节包括本体连接端和关节连接端,所述关节连接端周向上设有轴向定位面和径向定位面;所述连接法兰周向上设有与轴向定位面配合的轴向配合面以及与径向定位面配合的径向配合面,其特征在于,所述关节连接端上端设有多个通孔,所述连接法兰边缘均匀设有多个与通孔对应的螺纹孔;所述关节连接端和连接法兰间设有若干固定螺钉,所述固定螺钉依次穿过通孔、螺纹孔实现对第一关节和连接法兰的定位与安装固定。
2、进一步的,所述连接法兰远离关节连接端一侧设有薄壁结构;所述薄壁结构与第二关节的外壳间设有密封结构。
3、进一步的,所述密封结构为油封。
4、进一步的,所述关节连接端上方设有螺钉槽。
5、进一步的,所述第二关节内设有谐波减速器组件,所述连接法兰内侧均匀设有多个沉头孔,通过连接螺钉与谐波减速器组件连接。
6、进一步的,所述固定螺钉的螺帽端连接有垫片。
7、进一步的,所述多个通孔分布在关节连接端上端面的同一圆周上。
8、进一步的,所述沉头孔分布在连接法兰的同一圆周上。
9、本实用新型还提供一种协作机器人,包括协作机器人本体;上述的关节连接结构;所述协作器人本体的各个关节处至少一处设置有所述关节连接结构。
10、与现有技术相比较,本实用新型带来的有益效果是:
11、(1)本实用新型更改了第一关节和第二关节间固定螺钉的连接方向,不仅能够更便捷进行关节间的拆装,而且在此结构下可取消过渡环和橡胶环等零件,避免了零件间因相对运动产生磨损导致的掉粉掉屑的现象;
12、(2)设置的密封结构和连接法兰的薄壁结构紧密贴合,能够有效避免碎屑的产生和流出,提高了机器人的洁净度和防护等级,从而增加了协作机器人的使用场景。
技术特征:
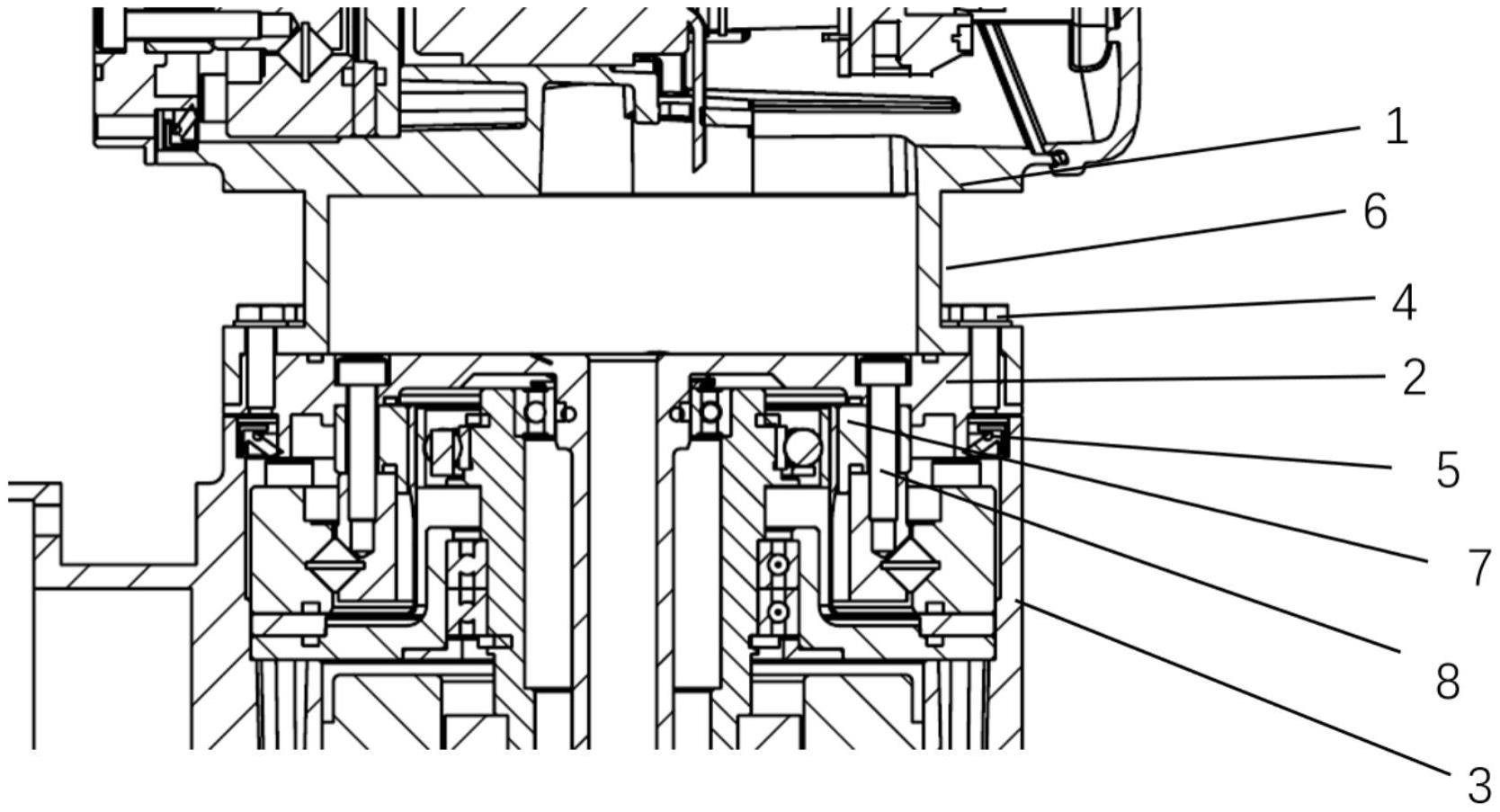
1.一种关节连接结构,包括第一关节(1)、连接法兰(2)和第二关节(3),所述第一关节(1)包括本体连接端(100)和关节连接端(101),所述关节连接端(101)周向上设有轴向定位面(102)和径向定位面(103);所述连接法兰(2)周向上设有与轴向定位面(102)配合的轴向配合面(200)以及与径向定位面(103)配合的径向配合面(201),其特征在于,所述关节连接端(101)上端设有多个通孔(104),所述连接法兰(2)边缘均匀设有多个与通孔(104)对应的螺纹孔(202);所述关节连接端(101)和连接法兰(2)间设有若干固定螺钉(4),所述固定螺钉(4)依次穿过通孔(104)、螺纹孔(202)实现对第一关节(1)和连接法兰(2)的定位与安装固定。
2.根据权利要求1所述的一种关节连接结构,其特征在于,所述连接法兰(2)远离关节连接端(101)一侧设有薄壁结构(203);所述薄壁结构(203)与第二关节(3)的外壳间设有密封结构(5)。
3.根据权利要求2所述的一种关节连接结构,其特征在于,所述密封结构(5)为油封。
4.根据权利要求1所述的一种关节连接结构,其特征在于,所述关节连接端(101)上方设有螺钉槽(6)。
5.根据权利要求1所述的一种关节连接结构,其特征在于,所述第二关节(3)内设有谐波减速器组件(7),所述连接法兰(2)内侧均匀设有多个沉头孔(204),通过连接螺钉(8)与谐波减速器组件(7)连接。
6.根据权利要求1所述的一种关节连接结构,其特征在于,所述固定螺钉(4)的螺帽端连接有垫片。
7.根据权利要求1所述的一种关节连接结构,其特征在于,所述多个通孔(104)分布在关节连接端(101)上端面的同一圆周上。
8.根据权利要求5所述的一种关节连接结构,其特征在于,所述沉头孔(204)分布在连接法兰(2)的同一圆周上。
9.一种协作机器人,其特征在于,包括协作机器人本体和权利要求1-8中任一项所述关节连接结构;所述协作机器人本体的各个关节处至少一处设置有所述关节连接结构。
技术总结
本技术公开了一种关节连接结构及协作机器人,关节连接结构包括第一关节、连接法兰和第二关节,所述第一关节的关节连接端上端设有多个通孔,所述连接法兰边缘均匀设有多个与通孔对应的螺纹孔;所述关节连接端和连接法兰间设有若干固定螺钉,所述固定螺钉依次穿过沉头孔、螺纹孔实现对第一关节和连接法兰的定位与安装固定;所述连接法兰远离关节连接端一侧设有薄壁结构;所述薄壁结构与第二关节的外壳间设有密封结构。本技术提供的关节连接结构不仅能够更便捷进行关节间的拆装,还能够有效避免碎屑的产生和流出,提高了机器人的洁净度和防护等级。
技术研发人员:高瑜刚,蔡嵩林,孙恺,曹宇男
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:20221125
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!