一种主从机械手夹钳与从动手臂连接装置的制作方法
本技术涉及乏燃料后处理,尤其是涉及一种主从机械手夹钳与从动手臂连接装置。
背景技术:
1、主从机械手是乏燃料后处理的重要热室操作设备,其主要由主动手臂、从动手臂、穿墙管三部分构成,通过安装在热室前区墙壁上的机械手可实现乏燃料后处理工艺热室内的远距离操作和维修,其性能和可靠性直接关系到热室内部远距离操作的安全性、可靠性和稳定性。随着生产运行时间越来越长,在长时间高频次的使用下,从动手臂与操作夹钳间的联接头问题频发,造成机械手夹钳无法动作的故障,且进口从动手臂采购周期长、采购困难,长期无备件更换将造成生产线停车。
2、因此,为解决主从机械手夹钳因从动手臂联接头故障导致设备无法操作,进而造成生产线停车的问题,需要设计制作一种简单、便捷的主从机械手夹钳与从动手臂连接装置,以达到备件替换、设备快速检修保证设备运行的目的。
技术实现思路
1、本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种主从机械手夹钳与从动手臂连接装置,本方案中的主从机械手夹钳与从动手臂连接装置能够实现主从机械手备件替换、降低夹钳因连接问题无动作的故障率,同时提高操作人员的安全检修水平及生产运行效率。
2、本实用新型的目的可以通过以下技术方案来实现:
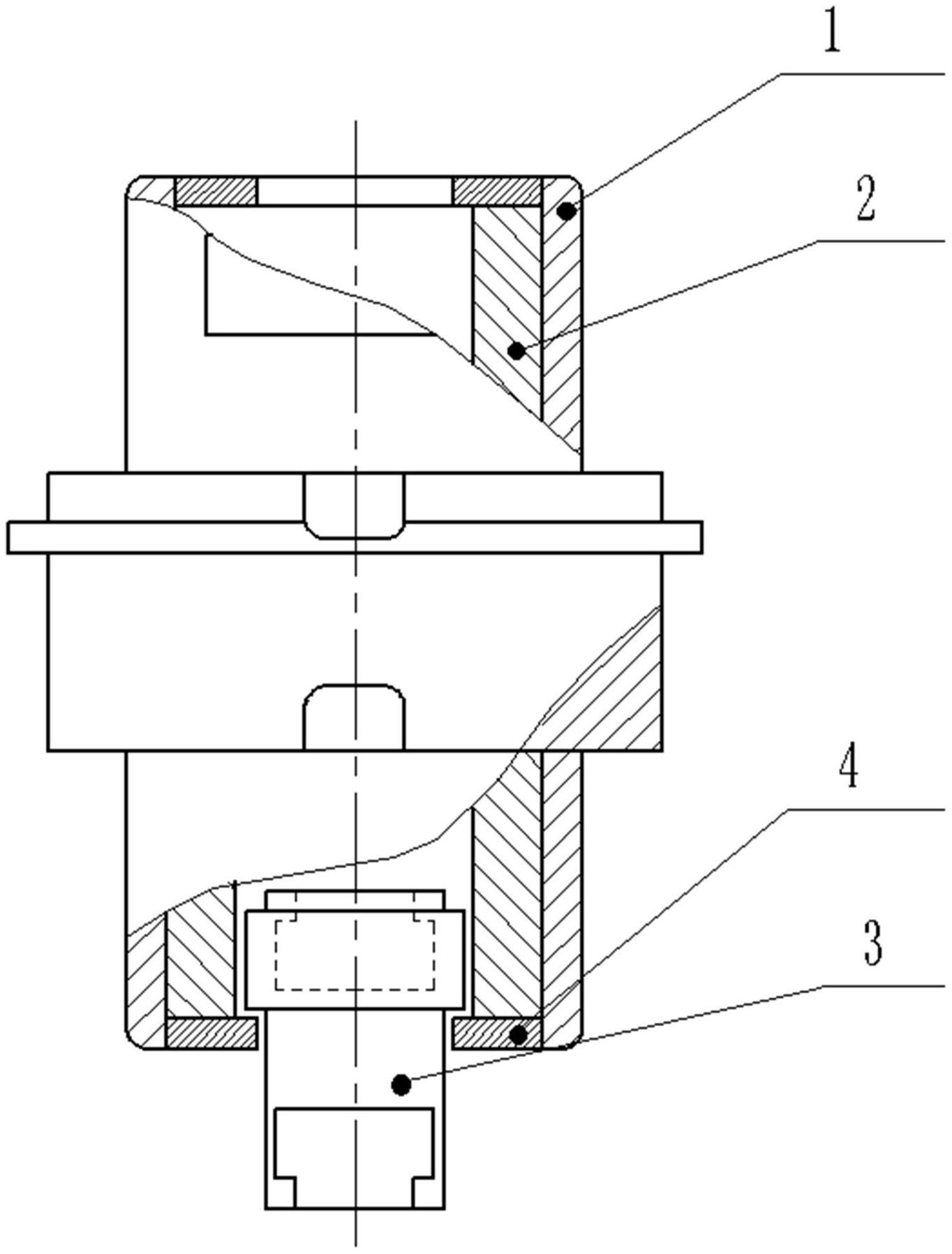
3、本实用新型的目的是提供一种主从机械手夹钳与从动手臂连接装置,包括连接壳、导向套、连接机构和止退板;所述连接壳分别与从动手臂连接卡槽和夹钳连接卡槽连接;所述导向套的外表面与连接壳的内表面过盈配合;所述连接机构设于所述导向套内,所述连接机构与所述导向套滑动连接;所述止退板设于所述连接壳上下端,所述连接壳与所述止退板固定连接。
4、进一步地,所述连接壳与所述止退板焊接。
5、进一步地,所述导向套为外圆内方柱体结构。
6、进一步地,所述导向套包括内方槽;所述连接机构在所述内方槽内滑动。
7、进一步地,所述连接机构包括导向柱与连接柱;所述导向柱的内表面与连接柱的外表面过盈配合。
8、进一步地,所述导向柱为外方内圆柱体结构。
9、进一步地,连接柱的上下均设有内嵌式连接孔,分别与从动手臂拉杆、夹钳张合拉杆连接。
10、优选地,所述连接壳为铝合金材质。
11、优选地,所述导向套为铝合金材质。
12、优选地,所述连接机构为铝合金材质。
13、优选地,所述止退板为铝合金材质。
14、与现有技术相比,本实用新型具有如下有益效果:
15、1)本技术方案中的主从机械手夹钳与从动手臂连接装置,能够实现夹钳与机械手从动臂联接,可解决主从机械手夹钳因动力传递连接故障而无法动作的问题。
16、2)本技术方案中的主从机械手夹钳与从动手臂连接装置,有效减少了人员检维修频率及检修过程剂量受照率,同时提高了系统运行效率。
技术特征:
1.一种主从机械手夹钳与从动手臂连接装置,其特征在于,包括连接壳(1)、导向套(2)、连接机构(3)和止退板(4);
2.根据权利要求1所述的一种主从机械手夹钳与从动手臂连接装置,其特征在于,所述导向套(2)为外圆内方柱体结构。
3.根据权利要求2所述的一种主从机械手夹钳与从动手臂连接装置,其特征在于,所述导向套(2)包括内方槽;所述连接机构(3)在所述内方槽内滑动。
4.根据权利要求1所述的一种主从机械手夹钳与从动手臂连接装置,其特征在于,所述连接机构(3)包括导向柱(5)与连接柱(6);
5.根据权利要求4所述的一种主从机械手夹钳与从动手臂连接装置,其特征在于,所述导向柱(5)为外方内圆柱体结构。
6.根据权利要求4所述的一种主从机械手夹钳与从动手臂连接装置,其特征在于,连接柱(6)的上下均设有内嵌式连接孔,分别与从动手臂拉杆(9)、夹钳张合拉杆(8)连接。
7.根据权利要求1所述的一种主从机械手夹钳与从动手臂连接装置,其特征在于,所述连接壳(1)为铝合金材质。
8.根据权利要求1所述的一种主从机械手夹钳与从动手臂连接装置,其特征在于,所述导向套(2)为铝合金材质。
9.根据权利要求1所述的一种主从机械手夹钳与从动手臂连接装置,其特征在于,所述连接机构(3)为铝合金材质。
10.根据权利要求1所述的一种主从机械手夹钳与从动手臂连接装置,其特征在于,所述止退板(4)为铝合金材质。
技术总结
本技术涉及一种主从机械手夹钳与从动手臂连接装置,该主从机械手夹钳与从动手臂连接装置包括连接壳、导向套、连接机构和止退板;所述连接壳分别与从动手臂连接卡槽和夹钳连接卡槽连接;所述导向套的外表面与连接壳的内表面过盈配合;所述连接机构设于所述导向套内,所述连接机构与所述导向套滑动连接;所述止退板设于所述连接壳上下端,所述连接壳与所述止退板固定连接。与现有技术相比,本技术中的主从机械手夹钳与从动手臂连接装置可以解决主从机械手夹钳因动力传递连接故障而造成的夹钳无法动作的问题,有效减少了人员检维修频率及检修过程剂量受照率,且提高了生产系统的运行效率。
技术研发人员:韩宗洹,茹作翔,白雨泽,马玉贵,王超,孙恺,吴克旺,马乐
受保护的技术使用者:中核四0四有限公司
技术研发日:20221125
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!