一种6自由度类人机器人手臂
本技术涉及机器人手臂领域,具体涉及一种6自由度类人机器人手臂。
背景技术:
1、机器人手臂拥有机械运动机构精准度高、稳定性好与人类手臂适应性强以及美观的优点,能够实现人类手臂在结构上满足而在功能上不满足的行为,如长时间下的周期循环运动,长时间负载的保持运动等。机器人手臂技术已经在在智能技术领域得到了广泛的运用,主要是出现在在服务机器人、人工智能、医疗机器人等领域。大多数传统的机器人手臂在设计之初的主要目标是完成指定的目标任务而较少考虑手臂功能与结构设计的协调性,只在功能上实现了类人的设计,完成基本的机动性;在结构上没有做到小型化,手臂结构较复杂且与人手臂的形象有偏差。虽然能够满足部分的任务要求,但复杂的机械结构降低了手臂协调性,使得其功能上受到了限制,在外观上也不不具有人手的美感。
2、现有技术为了完成设计任务,为了保证电机够稳定而精确地进行位置控制,设计了手,肘,肩三大基本构型,先设计电机连接件的拼接来完成基本的运动机能,此时,为了满足多个自由度的集成,不免需要将多个连接件相互拼接来达到肩部部位的多自由度,同时手臂的自由度也需要合理的设计而保护电机的运动,此时电机和结构件已经构成了一台机械臂。很多现有的产品就到这步为止,但是其一体化程度不高,也不够美观。
3、为了设计一体化,就需要额外设计外壳来包裹电机和舵机,这同时也带来了机械臂的美感。但是外壳的体积因为由电机连接件的存在,必须设计得大而无用,所有的力都用骨架承担,这使得外壳的作用仅剩了美观,用最大的体积承受最小的力,对于机械设计来说是十分奢侈的事情,所以能否利用手臂外壳的新型结构设计来保证运动机能是关键性问题。
4、要将包装外壳和电机连接件设计在一起的话,会存在小尺寸机械手臂中电机的偏置问题,即手臂并非绕着手臂的轴心旋转,而是有着很大程度得偏移,以及传统齿轮机构还存在走线困难的问题(多自由度机器人机械手臂结构设计方法研究),现有设计的多自由度机械臂会降低自己的机动性来保证美观,或者加入中空结构(利于电线、电管在里面通过);采用直流电机提供动力(减小体积),加速齿轮或加速机传动(保证精度),仍然需要包事外壳在肘部,大小臂连接处来进行辅助。而这就导致机械臂的自由度越高,体积越庞大。在同样是6自由度的机械臂上,难以见到令人满意的一体化手臂(多自由度机器人机械手臂结构设计方法研究)。
技术实现思路
1、本实用新型的目的是提供一种6自由度类人机器人手臂,利用将外壳直接作为电机连接件,利用内置齿轮减速机构解决偏置问题以此来完成一体化设计,减少体积。
2、本实用新型的目的至少通过如下技术方案之一实现。
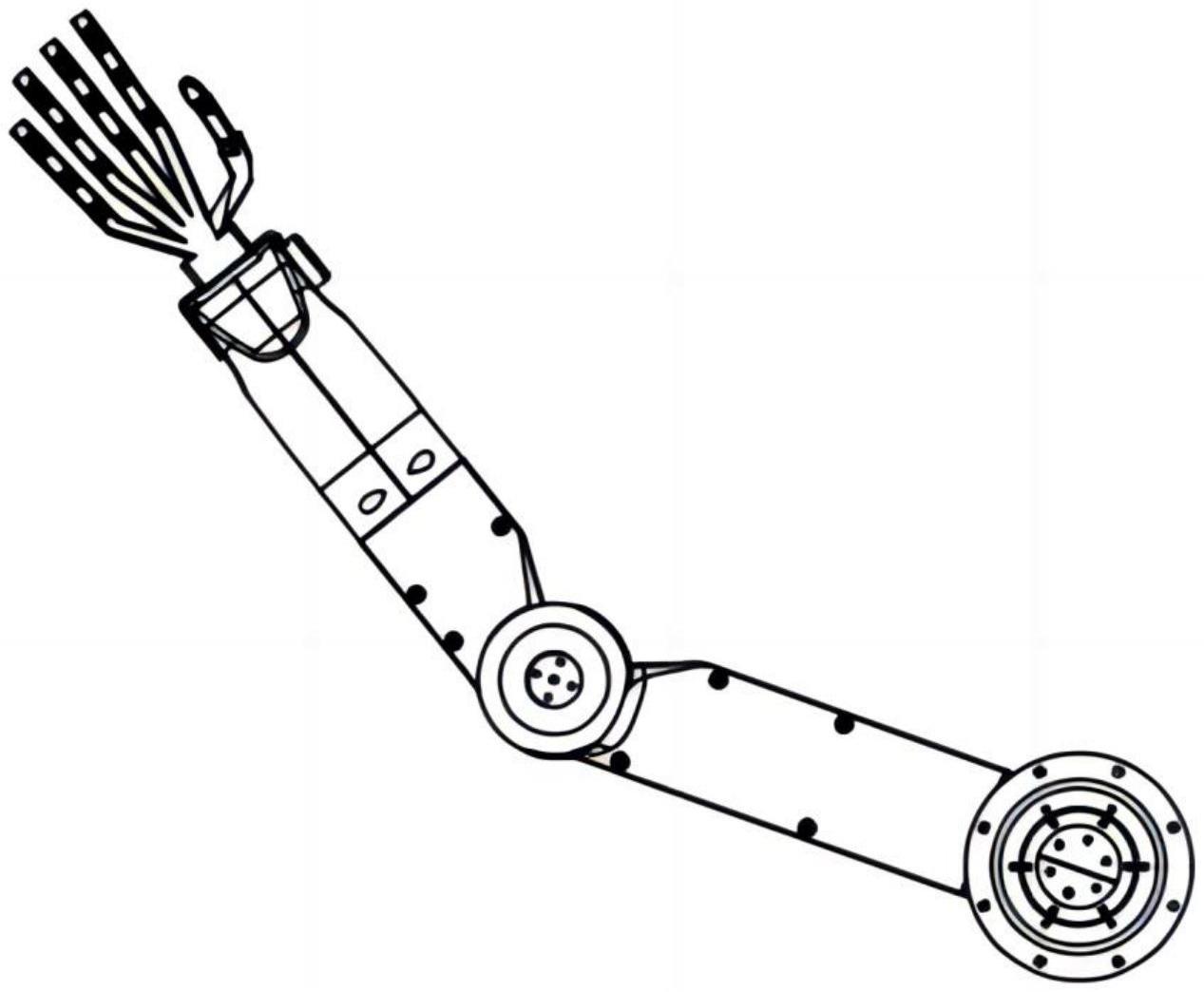
3、一种6自由度类人机器人手臂,包括顺次连接的肩膀机构、大臂机构、小臂机构以及手掌机构;
4、肩膀机构、大臂机构、小臂机构以及手掌机构均采用模块化结构,每个机构可单独拆卸进行调整与维修。
5、进一步地,所述肩膀机构包括肩膀支撑板、肩膀无刷伺服电机、肩膀外壳和大臂无刷伺服电机;
6、其中,肩膀支撑板连接肩膀无刷伺服电机,用于固定整个机器人手臂,且肩膀无刷伺服电机与肩膀支撑板的轴心重合;肩膀支撑板和肩膀外壳均设置有螺纹孔;肩膀无刷伺服电机连接肩膀外壳,肩膀无刷伺服电机带动肩膀外壳绕肩膀无刷伺服电机旋转;大臂无刷伺服电机固定在肩膀外壳内,可以节省体积,并利用结构固定电机提升稳定性。
7、进一步地,大臂机构包括大臂上部外壳、大臂主干外壳和大臂数字舵机;大臂上部外壳连接大臂主干外壳;
8、其中,大臂上部外壳设置有螺纹孔,通过紧固件将大臂无刷伺服电机的内转轴与大臂上部外壳直接连接,使得大臂无刷伺服电机转动时大臂上部外壳会跟着一起旋转;大臂数字舵机设置在大臂主干外壳内,通过大臂数字舵机提供的旋转自由度,带动大臂主干外壳沿大臂机构的轴心转动;大臂主干外壳下方设置有螺纹孔,用于和小臂机构连接。
9、进一步地,大臂数字舵机的转动轴和大臂机构的轴心存在偏置,设置第一齿轮减速机构,第一齿轮减速机构包括第一薄壁轴承、第一舵机齿轮和大臂内齿圈;
10、其中,大臂内齿圈腔体做了镂空处理,大臂内齿圈内嵌于大臂上部外壳内;大臂数字舵机的轴与第一舵机齿轮连接,大臂内齿圈与第一舵机齿轮咬合,通过第一舵机齿轮带动大臂内齿圈使得大臂内齿圈的旋转绕着其圆心旋转,解决了偏置问题。
11、进一步地,小臂机构包括手肘外壳、小臂外壳、手肘数字舵机、小臂数字舵机、手腕数字舵机和5个手指数字舵机;手肘外壳和小臂外壳通过螺丝连接,确保小臂的一体性;
12、其中,手肘数字舵机设置在手肘外壳内部,手肘外壳中设置有定位梁,用于固定手肘数字舵机;通过手肘数字舵机旋转自由度,手肘外壳绕手肘数字舵机进行旋转;
13、小臂数字舵机设置在手肘外壳内,通过小臂数字舵机提供的自由度,带动手肘外壳沿小臂机构的轴心转动;5个手指数字舵机并排排列设置在小臂外壳内腔中,小臂外壳内腔两侧设置有固定板,用于固定5个手指数字舵机;小臂外壳下方设置有限位卡槽,用于限制和固定手腕数字舵机。
14、进一步地,小臂数字舵机的转动轴和小臂机构的轴心存在偏置;
15、在手肘外壳和小臂外壳之间设置第二齿轮减速机构,第二齿轮减速机构包括第二薄壁轴承、第二舵机齿轮和小臂内齿圈;小臂内齿圈腔体做了镂空处理,小臂内齿圈内嵌于小臂外壳内;小臂数字舵机的轴与第二舵机齿轮连接,小臂内齿圈与第二舵机齿轮咬合,通过第二舵机齿轮带动小臂内齿圈使得小臂内齿圈的旋转绕着其圆心旋转,解决了偏置问题。
16、进一步地,所述手掌机构包括手掌骨骼和5组手指关节;
17、手掌骨骼连接手腕数字舵机,通过手腕数字舵机提供的旋转自由度,手掌骨骼围绕手腕数字舵机进行转动;
18、手指关节与手掌骨骼通过铰链机构连接;所述手掌机构为纯机械机构,通过拉线方式交由小臂机构中的5个手指数字舵机驱动。
19、进一步地,其中,手掌骨骼的结构设计取自人类掌骨,内部设置为中空结构;手指关节除拇指为两关节设计外,其他4指为三关节设计。
20、进一步地,大臂数字舵机、手肘数字舵机、小臂数字舵机、手腕数字舵机、和5个手指数字舵机采用hitec hs-311。
21、进一步地,肩膀无刷伺服电机和大臂无刷伺服电机采用qdd lite-ne30-36。
22、相比于现有技术,本实用新型的优点在于:
23、本实用新型相较于传统类人机械手臂尺寸更小,将各机构模块化,对手臂内部的空间利用率更高,齿轮减速机构解决了小尺寸机械手臂中电机的偏置问题和传统齿轮机构走线困难的问题。与其他机器人手臂相比,专门的结构和模块化的设计使得本实用新型的类人机器人手臂更加轻便与小型化,且更容易制造同时后期维修保养也更简单。
技术特征:
1.一种6自由度类人机器人手臂,其特征在于:包括顺次连接的肩膀机构、大臂机构、小臂机构以及手掌机构;
2.根据权利要求1所述的一种6自由度类人机器人手臂,其特征在于:所述肩膀机构包括肩膀支撑板(2)、肩膀无刷伺服电机(1)、肩膀外壳(3)和大臂无刷伺服电机(4);
3.根据权利要求2所述的6自由度类人机器人手臂,其特征在于:大臂机构包括大臂上部外壳(5)、大臂主干外壳(6)和大臂数字舵机(7);大臂上部外壳(5)连接大臂主干外壳(6);
4.根据权利要求3所述的6自由度类人机器人手臂,其特征在于:大臂数字舵机(7)的转动轴和大臂机构的轴心存在偏置,设置第一齿轮减速机构,第一齿轮减速机构包括第一薄壁轴承(16)、第一舵机齿轮(18)和大臂内齿圈(17);
5.根据权利要求3所述的6自由度类人机器人手臂,其特征在于:小臂机构包括手肘外壳(8)、小臂外壳(11)、手肘数字舵机(9)、小臂数字舵机(10)、手腕数字舵机(13)和5个手指数字舵机(12);手肘外壳(8)和小臂外壳(11)通过螺丝连接,确保小臂的一体性;
6.根据权利要求5所述的6自由度类人机器人手臂,其特征在于:小臂数字舵机(10)的转动轴和小臂机构的轴心存在偏置;
7.根据权利要求5所述的6自由度类人机器人手臂,其特征在于,所述手掌机构包括手掌骨骼(14)和5组手指关节(15);
8.根据权利要求7所述的6自由度类人机器人手臂,其特征在于,其中,手掌骨骼(14)的结构设计取自人类掌骨,内部设置为中空结构;手指关节(15)除拇指为两关节设计外,其他4指为三关节设计。
9.根据权利要求1~8任一项所述的6自由度类人机器人手臂,其特征在于,大臂数字舵机(7)、手肘数字舵机(9)、小臂数字舵机(10)、手腕数字舵机(13)、和5个手指数字舵机(12)采用hitec hs-311。
10.根据权利要求1~8任一项所述的6自由度类人机器人手臂,其特征在于,肩膀无刷伺服电机(1)和大臂无刷伺服电机(4)采用qdd lite-ne30-36。
技术总结
本技术公开了一种6自由度类人机器人手臂,包括顺次连接的肩膀机构、大臂机构、小臂机构以及手掌机构;肩膀机构、大臂机构、小臂机构以及手掌机构均采用模块化结构,每个机构可单独拆卸进行调整与维修。本技术采用齿轮减速机构解决了小尺寸机械手臂中电机的偏置问题和传统齿轮机构走线困难的问题。与其他机器人手臂相比,专门的结构和模块化的设计使得本技术的类人机器人手臂更加轻便,且更容易制造同时后期维修保养也更简单。
技术研发人员:张智军,林宇航,朱海航
受保护的技术使用者:华南理工大学
技术研发日:20221129
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!