机械手的制作方法
本技术涉及捡取或放下物件的装置,具体是一种机械手。
背景技术:
1、牙种植体、医用螺钉等广泛应用于牙科、骨科手术中,金属植入材料的表面形貌、成分对生物相容性至关重要。其中,酸蚀处理是金属植入材料表面处理过程中不可缺少的一道工序。牙科种植体尺寸小,进行酸蚀前,会将一定数量的牙科种植体放置在吊篮内,然后利用机械手将吊篮放入装载酸液的容器里。由此实现对牙科种植体的批量化处理。
2、中国专利cn203371544u公开了一种夹持机械手,包括支座,支座上设有两根用于夹持的机械手手指,通过两根手指的伸缩及开合实现抓取和夹持动作。但是利用上述机械手手指夹持吊篮,机械手手指与吊篮为点接触,夹持稳定性差。
技术实现思路
1、本实用新型的目的是提供一种专用于夹持吊篮的机械手,利用本申请的机械手夹持吊篮更加牢固。为此,本实用新型采用以下技术方案:
2、机械手,用于夹持装载牙科种植体的吊篮,包括柄部和夹持装置,所述夹持装置包括第一夹持臂和第二夹持臂,所述第一夹持臂和所述第二夹持臂均与所述柄部转动连接,所述第一夹持臂和所述第二夹持臂均设置有夹持部,所述夹持部用于抱紧所述吊篮上的杆状结构并与之相贴合。
3、作为上述技术方案的进一步改进:
4、所述柄部设有用于驱动所述第一夹持臂和所述第二夹持臂转动的驱动机构。所述驱动机构为气缸或液压缸。
5、所述第一夹持臂包括夹爪、连接杆和转动杆,所述连接杆一端与所述气缸缸体铰接,另一端与所述夹爪固定连接,所述转动杆两端分别与所述气缸活动杆和所述夹爪铰接,所述夹持部设置在所述夹爪上;所述第一夹持臂与所述第二夹持臂结构一致。
6、更进一步的,所述夹爪呈圆弧形。
7、更进一步的,所述连接杆由其悬空端向下弯折延伸而出形成延伸部,延伸部与所述夹爪连接且垂直设置。
8、所述柄部设有液位检测装置,所述液位检测装置为超声波液位传感器或雷达液位传感器。
9、所述柄部为伸缩件,伸缩件包括套筒和滑动杆,所述滑动杆可滑动地设置于所述套筒的内部,所述滑动杆的头部伸出于所述套筒之外且与所述夹持装置连接,所述液位检测装置设置在所述套筒上。
10、更进一步的,所述柄部为液压伸缩杆。
11、所述柄部表面和所述夹持装置表面均覆盖有一层氟层。
12、相比于现有技术,本实用新型至少取得如下有益效果:
13、1.第一夹持臂和第二夹持臂闭合,将吊篮的连接柱卡入两个所述夹持部的组配结构内,实现抓取吊篮动作。由于两个所述夹持部的组配结构与吊篮的连接柱的形状和尺寸相匹配,增大夹持臂与吊篮的接触面积,提高夹持稳定性。
14、2.柄部设有液位检测装置,在抓取吊篮的过程中可检测容器内酸液的容量。
技术特征:
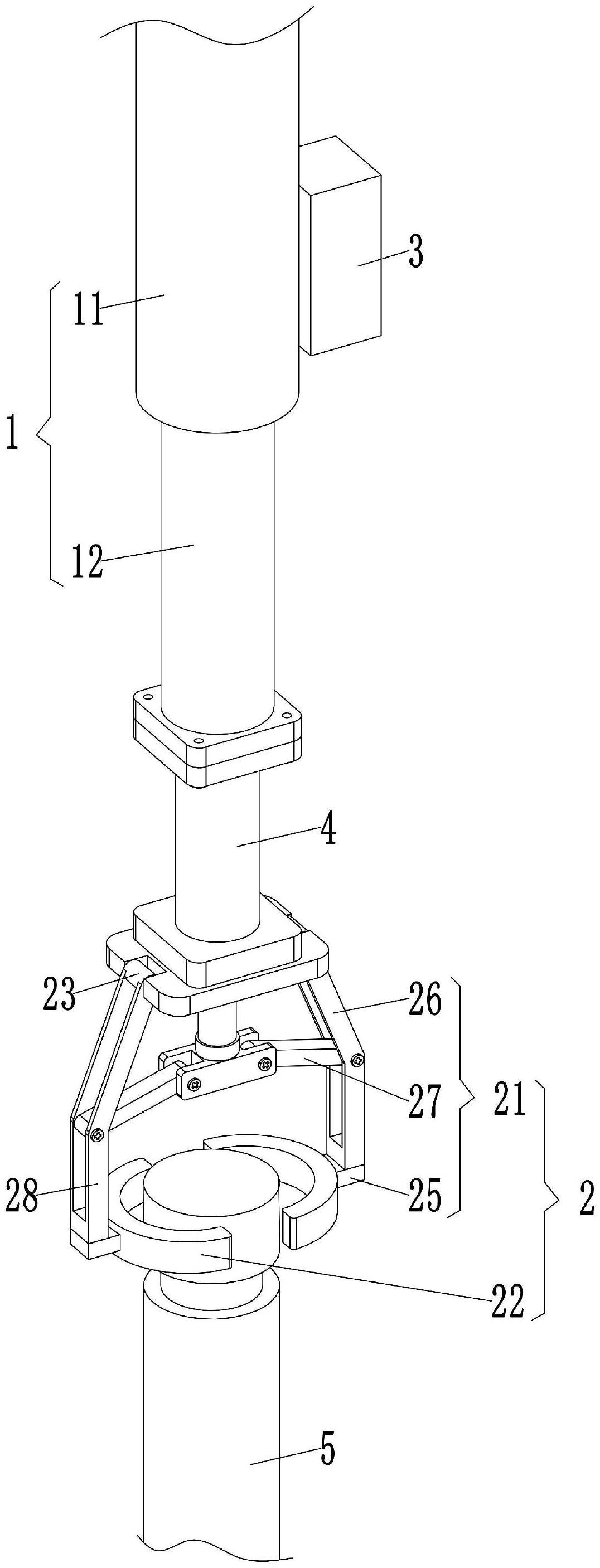
1.机械手,用于夹持装载牙科种植体的吊篮,其特征在于:包括柄部(1)和夹持装置(2),所述夹持装置(2)包括第一夹持臂(21)和第二夹持臂(22),所述第一夹持臂(21)和所述第二夹持臂(22)均与所述柄部(1)转动连接,
2.根据权利要求1所述的机械手,其特征在于:所述柄部(1)设有用于驱动所述第一夹持臂(21)和所述第二夹持臂(22)转动的驱动机构(4)。
3.根据权利要求2所述的机械手,其特征在于:所述驱动机构(4)为气缸或液压缸。
4.根据权利要求3所述的机械手,其特征在于:所述第一夹持臂(21)包括夹爪(25)、连接杆(26)和转动杆(27),所述连接杆(26)一端与所述气缸缸体铰接,另一端与所述夹爪(25)固定连接,所述转动杆(27)两端分别与所述气缸活动杆和所述夹爪(25)铰接,所述夹持部(24)设置在所述夹爪(25)上;所述第一夹持臂(21)与所述第二夹持臂(22)结构一致。
5.根据权利要求4所述的机械手,其特征在于:所述夹爪(25)呈圆弧形。
6.根据权利要求5所述的机械手,其特征在于:所述连接杆(26)由其悬空端向下弯折延伸而出形成延伸部(28),延伸部(28)与所述夹爪(25)连接且垂直设置。
7.根据权利要求1所述的机械手,其特征在于:所述柄部(1)设有液位检测装置(3),液位检测装置(3)为超声波液位传感器或雷达液位传感器。
8.根据权利要求7所述的机械手,其特征在于:所述柄部(1)为伸缩件,伸缩件包括套筒(11)和滑动杆(12),所述滑动杆(12)可滑动地设置于所述套筒(11)的内部,所述滑动杆(12)的头部伸出于所述套筒(11)之外且与所述夹持装置(2)连接,所述液位检测装置(3)设置在所述套筒(11)上。
9.根据权利要求1所述的机械手,其特征在于:所述柄部(1)为液压伸缩杆。
10.根据权利要求1所述的机械手,其特征在于:所述柄部(1)表面和所述夹持装置(2)表面均覆盖有一层氟层。
技术总结
本技术公开了机械手,包括柄部和夹持装置,所述夹持装置包括第一夹持臂和第二夹持臂,所述第一夹持臂和所述第二夹持臂均通过转动轴与所述柄部连接,所述第一夹持臂和所述第二夹持臂均设有夹持部,两个所述夹持部的组配结构与吊篮的连接柱的形状和尺寸相匹配。第一夹持臂和第二夹持臂闭合,将吊篮的连接柱卡入两个所述夹持部的组配结构内,实现抓取吊篮动作。
技术研发人员:常林,周俊,宾士友
受保护的技术使用者:桂林市啄木鸟医疗器械有限公司
技术研发日:20221130
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!