一种用于微晶锡球生产的承重机械手的制作方法
本技术涉及机械设备,尤其涉及一种用于微晶锡球生产的承重机械手。
背景技术:
1、机械手在自动化领域的应用越来越广泛,可以用来按照固定程序抓取、搬运物件或操作工具的自动操作装置;在微晶锡球生产需要用到微型承重机械手,通过微型承重机械手拿取需、传输等帮助微晶锡球进行产品生产,对于汇聚在一起的微晶锡球产品,由于其重量较大,在夹持去该类较重产品时,现有的微型机械手的小臂承重能力力量单一,且承重的力量都汇聚在小臂前端,重力分布不均匀,在长时间的承重运转下容易产生消耗,以及成长机械手的底座与其他物件的接触面积小,在工作的过程中不够稳定,容易使其承重机械手在承重的过程中倾倒,从而导致承重机械手损坏,降低了承重机械手的使用寿命。
技术实现思路
1、针对现有技术中对于存在的上述问题,现提供一种用于微晶锡球生产的承重机械手。
2、具体技术方案如下:
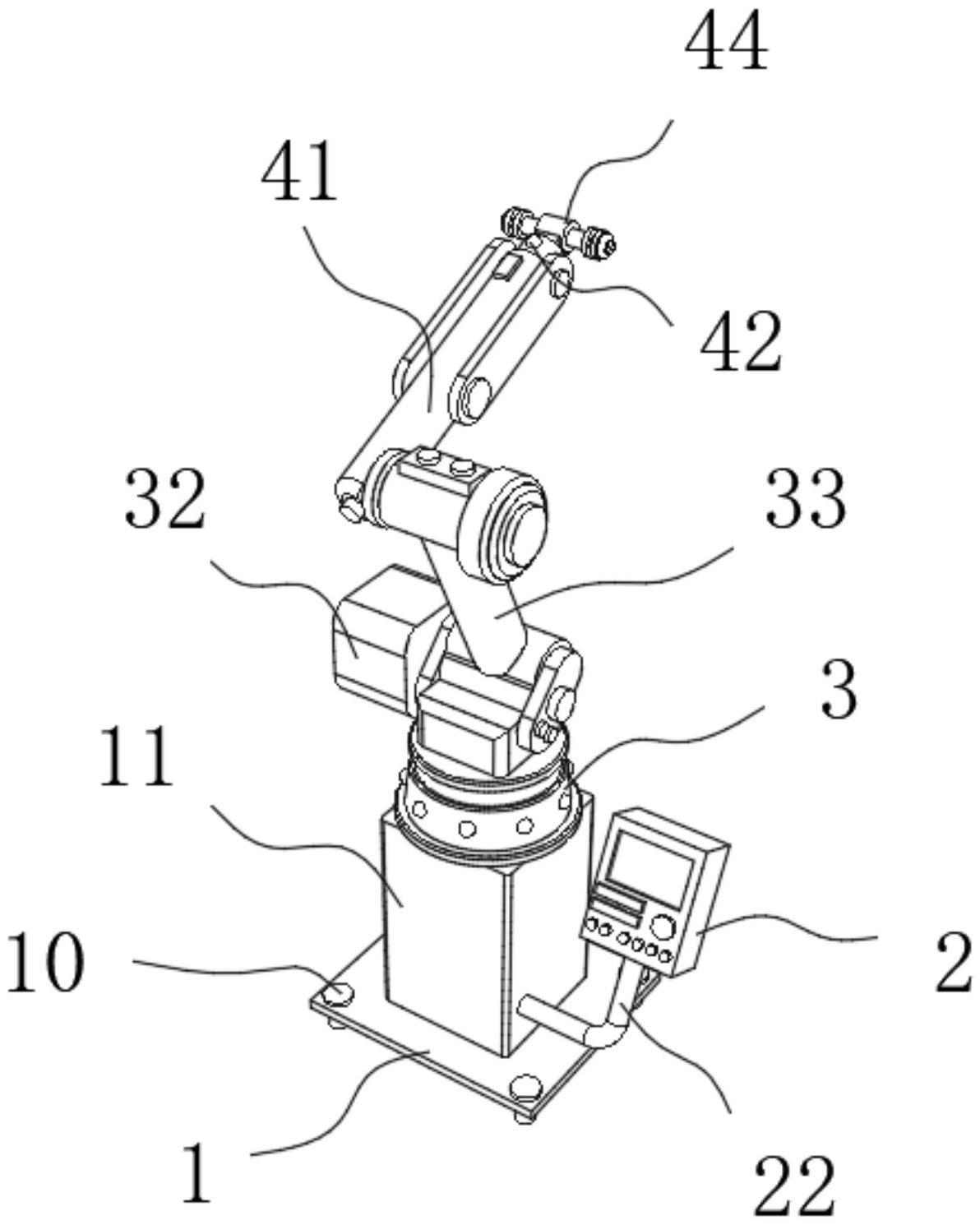
3、设计一种用于微晶锡球生产的承重机械手,包括底板、控制器以及机械手组件,所述底板的顶部中心位置固定连接有立柱,所述立柱的一侧固定连接有电源接端,所述底板上均匀的开设有四个定位孔,所述定位孔位于底板四个转角边的顶部且贯穿底板,所述控制器通过l形的连接杆固定连接所述立柱的一侧,所述机械手组件位于所述立柱的顶端,所述机械手组件包括转动底座,所述转动底座的底部通过转动轴活动连接所述立柱的顶部。
4、优选的,所述转动底座顶部固定连接有衔接座,所述衔接座的顶部活动连接有大臂,所述衔接座远离控制器的一侧固连接有第一电机,所述第一电机的输出端固定连接所述大臂的输入端,所述大臂远离立柱的一端固定连接有衔接臂,所述衔接臂远离大臂的一端活动连接有小臂。
5、优选的,所述衔接臂远离第一电机的一侧固定连接有第二电机,所述第二电机的输出端固定连接所述小臂的输入端,所述小臂远离衔接臂的一端固定活动连接有前端,所述前端上固定连接有扫描装置。
6、优选的,所述立柱的内部固定连接有驱动电机,所述驱动电机驱动第一电机与第二电机,所述驱动电机的输出端固定连接转动底座的输入端。
7、优选的,所述小臂靠近前端的两侧设有加强板,所述加强板被加强轴贯穿,所述加强轴呈对称状分布且贯穿小臂,所述加强轴的两端固定连接有限位块,所述加强板的长度超过所述小臂的一半。
8、优选的,所述底板上的定位孔上设有螺钉,所述螺钉螺纹连接所述定位孔。
9、优选的,所述立柱远离第一电机的一侧通过连接杆固定连接有控制器,所述控制器的最高端不与第一电机的最低端接触。
10、上述技术方案具有如下优点或有益效果:
11、1、当机械手进行微晶锡球生产承重,前端进行承重时,小臂的支撑力被加强板加强,并且前端承重的重量被加强板均匀的分散,有利于提高小臂的强度以及承重力;底座与立柱采用高强度的合成钢材,设有底座与立柱,加大了机械手底部的接触面积,便于提高机械手的承重能力以及稳定性;
12、2、控制器内部包含有接受信息装置与计算驱动,便于接受与运算扫描装置发来的信息,帮助机械手准确承重,机械手的运行阶级根据操控人给的数据进行运行;前端上设有扫描器,有利于前端在承重通过扫描装置扫描、识别、传输给控制器,控制器快速做出判断反馈给前端,便于前端进行精准的承重。
技术特征:
1.一种用于微晶锡球生产的承重机械手,其特征在于:包括底板(1)、控制器(2)以及机械手组件(5),所述底板(1)的顶部中心位置固定连接有立柱(11),所述立柱(11)的一侧固定连接有电源接端(15),所述底板(1)上均匀的开设有四个定位孔(12),所述定位孔(12)位于底板(1)四个转角边的顶部且贯穿底板(1),所述控制器(2)通过l形的连接杆(22)固定连接所述立柱(11)的一侧,所述机械手组件(5)位于所述立柱(11)的顶端,所述机械手组件(5)包括转动底座(3),所述转动底座(3)的底部通过转动轴(13)活动连接所述立柱(11)的顶部。
2.根据权利要求1所述的一种用于微晶锡球生产的承重机械手,其特征在于:所述转动底座(3)顶部固定连接有衔接座(31),所述衔接座(31)的顶部活动连接有大臂(33),所述衔接座(31)远离控制器(2)的一侧固连接有第一电机(32),所述第一电机(32)的输出端固定连接所述大臂(33)的输入端,所述大臂(33)远离立柱(11)的一端固定连接有衔接臂(43),所述衔接臂(43)远离大臂(33)的一端活动连接有小臂(41)。
3.根据权利要求2所述的一种用于微晶锡球生产的承重机械手,其特征在于:所述衔接臂(43)远离第一电机(32)的一侧固定连接有第二电机(4),所述第二电机(4)的输出端固定连接所述小臂(41)的输入端,所述小臂(41)远离衔接臂(43)的一端固定活动连接有前端(44),所述前端(44)上固定连接有扫描装置(42)。
4.根据权利要求1所述的一种用于微晶锡球生产的承重机械手,其特征在于:所述立柱(11)的内部固定连接有驱动电机(14),所述驱动电机(14)驱动第一电机(32)与第二电机(4),所述驱动电机(14)的输出端固定连接转动底座(3)的输入端。
5.根据权利要求2所述的一种用于微晶锡球生产的承重机械手,其特征在于:所述小臂(41)靠近前端(44)的两侧设有加强板(52),所述加强板(52)被加强轴(51)贯穿,所述加强轴(51)呈对称状分布且贯穿小臂(41),所述加强轴(51)的两端固定连接有限位块(53),所述加强板(52)的长度超过所述小臂(41)的一半。
6.根据权利要求1所述的一种用于微晶锡球生产的承重机械手,其特征在于:所述底板(1)上的定位孔(12)上设有螺钉(10),所述螺钉(10)螺纹连接所述定位孔(12)。
7.根据权利要求1所述的一种用于微晶锡球生产的承重机械手,其特征在于:所述立柱(11)远离第一电机(32)的一侧通过连接杆(22)固定连接有控制器(2),所述控制器(2)的最高端不与第一电机(32)的最低端接触。
技术总结
本技术涉及机械设备技术领域,尤其是一种用于微晶锡球生产的承重机械手,包括底板、控制器以及机械手组件,所述底板的顶部中心位置固定连接有立柱,所述定位孔位于底板四个转角边的顶部且贯穿底板,所述控制器通过L形的连接杆固定连接所述立柱的一侧,所述机械手组件位于所述立柱的顶端,所述机械手组件包括转动底座,所述转动底座的底部通过转动轴活动连接所述立柱的顶部;前端进行承重时,小臂的支撑力被加强板加强,并且前端承重的重量被加强板均匀的分散,有利于提高小臂的强度以及承重力;底座与立柱采用高强度的合成钢材,设有底座与立柱,加大了机械手底部的接触面积,便于提高机械手的承重能力以及稳定性。
技术研发人员:张随缘,朱士蕊
受保护的技术使用者:苏州中锡金昶新材料有限公司
技术研发日:20221202
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!