一种砼压块安装的机械爪的制作方法
本技术涉及砼压块安装,尤其涉及一种砼压块安装的机械爪。
背景技术:
1、机械爪是模仿手和臂抓取物品的机械装置,对于不同种类的物品,需要使用特定的机械爪,机械爪通过夹紧作业对象,将作业对象移送到目标位置,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。
2、但是现有的砼压块安装的机械爪存在一定不足:
3、1、现有的机械爪通常承受负载能力小,变形过大,适用于抓取较轻的物品;
4、2、现有的机械爪结构复杂笨重,操作繁琐。
技术实现思路
1、本实用新型的目的在于提供一种砼压块安装的机械爪,以解决上述背景技术中提出的问题。
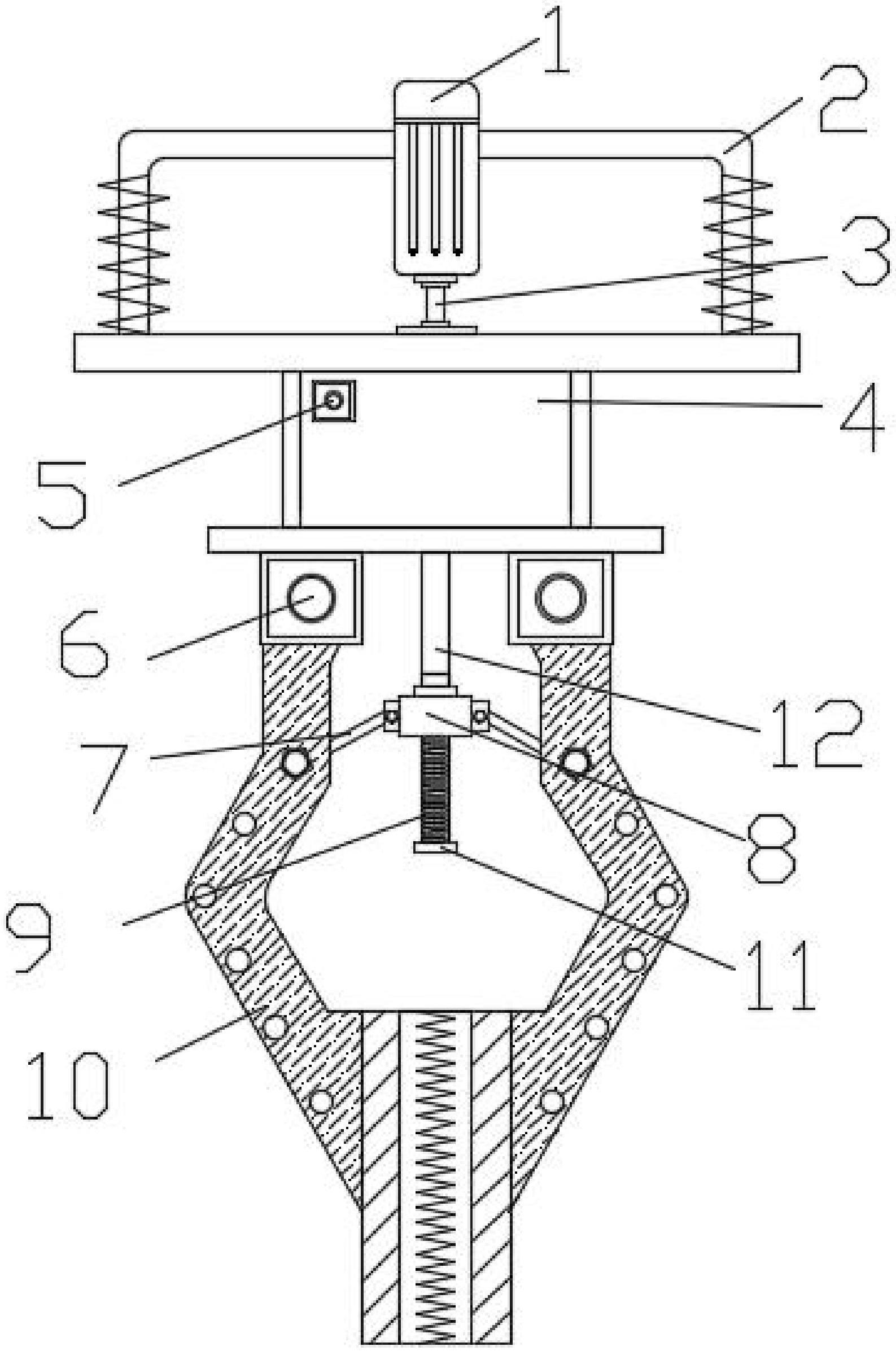
2、为实现上述目的,本实用新型提供如下技术方案:一种砼压块安装的机械爪,包括减速机和机械爪,其特征在于:所述减速机的顶部设置有电机支架,所述电机支架的中间位置处设置有驱动电机,所述驱动电机的输出端设置有电机转轴,所述电机转轴与减速机输入端连接,所述减速机的输出端设置有减速机转轴,所述减速机转轴底部设置有螺纹杆,所述螺纹杆外侧套设有内螺纹管,所述螺纹管的外侧铰接有两组连杆,且连杆远离螺纹管的一端铰接在机械爪的内壁上,所述减速机底部的两侧设置有安装块,且机械爪的顶端与安装块铰接,驱动电机、减速机通过导线电连接有控制开关。
3、优选的,所述机械爪为高强度复合钢材料。
4、优选的,所述螺纹杆底部设置有限位块。
5、优选的,所述机械爪底部的内侧设置有锯齿状结构。
6、优选的,所述电机支架的底部呈波浪形。
7、与现有技术相比,本实用新型的有益效果是:
8、1、通过设置减速机,使得转轴降低转速,使得内螺纹管在螺纹杆上匀速移动,进而使得机械爪匀速张合。
9、2、高强度复合钢材料且设置有锯齿状的机械爪,使得装置夹持重物更紧固,且机械爪不易发生形变。
10、3、固定支架底部的波浪形的结构,具备一定减震的作用,保证了作业过程中驱动电机稳定运行。
技术特征:
1.一种砼压块安装的机械爪,包括减速机(4)和机械爪(10),其特征在于:所述减速机(4)底部的两侧设置有安装块(6),所述安装块(6)的底部铰接有机械爪(10),所述减速机(4)的顶部设置有电机支架(2),所述电机支架(2)的中间位置处设置有驱动电机(1),所述驱动电机(1)的输出端设置有电机转轴(3),所述电机转轴(3)与减速机(4)输入端连接,所述减速机(4)的输出端设置有减速机转轴(12),所述减速机转轴(12)底部设置有螺纹杆(9),所述螺纹杆(9)外侧套设有内螺纹管(8),所述螺纹管(8)的外侧铰接有两组连杆(7),且连杆(7)远离螺纹管(8)的一端铰接在机械爪(10)的内壁上,驱动电机(1)、减速机(4)通过导线电连接有控制开关(5)。
2.根据权利要求1所述的一种砼压块安装的机械爪,其特征在于:所述机械爪(10)为高强度复合钢材料。
3.根据权利要求1所述的一种砼压块安装的机械爪,其特征在于:所述螺纹杆(9)底部设置有限位块(11)。
4.根据权利要求1所述的一种砼压块安装的机械爪,其特征在于:所述机械爪(10)底部的内侧设置有锯齿状结构。
5.根据权利要求1所述的一种砼压块安装的机械爪,其特征在于:所述电机支架(2)的底部呈波浪形。
技术总结
本技术是一种砼压块安装的机械爪,包括减速机和机械爪,所述减速机的顶部设置有电机支架,所述电机支架的中间位置处设置有驱动电机,所述驱动电机的输出端设置有电机转轴,所述电机转轴与减速机输入端连接,所述减速机的输出端设置有减速机转轴,所述减速机转轴底部设置有螺纹杆,所述螺纹杆外侧套设有内螺纹管,所述螺纹管的外侧铰接有两组连杆,且连杆远离螺纹管的一端铰接在机械爪的内壁上,所述减速机底部的两侧设置有安装块,且机械爪的顶端与安装块铰接,驱动电机、减速机通过导线电连接有控制开关。本技术所述机械爪使得砼压块被夹持的更加紧固,稳定性强,整体结构简单,操作便捷,实用性强。
技术研发人员:贾鹏,范士杰,王连莲,闫瑞,李建伟
受保护的技术使用者:中建六局水利水电建设集团有限公司
技术研发日:20221207
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!