一种关节机器人抓取模块的制作方法
本技术涉及工业机器人领域,具体涉及一种关节机器人抓取模块。
背景技术:
1、关节机器人在目前的自动化生产线中使用较为广泛,对于在自动化流水线中替代人工工序、提高工作质量和生产效率等方面产生了较为明显的作用。但是在应用于一些较为复杂的工件作业时,例如需要抓取本申请实施例中所提及的绞盘及其固定框座所组合成的复合工件时,由于工件较大且形状结构复杂,采用常规的左右夹持方式容易导致工件掉落,采用磁吸等其它方式碍于工件形状也很难实现可靠的夹持。
技术实现思路
1、鉴于以上情形,为了解决上述技术存在的问题,本实用新型提出一种关节机器人抓取模块,以更加可靠地夹持复杂工件,防止工件滑动或掉落。
2、一种关节机器人抓取模块,包括手腕组件、第一手指组件以及第二手指组件,所述手腕组件连接设置在关节机器人的手腕部上;所述手腕组件设有手爪支架,所述手爪支架上设有两组直线导轨,所述第一手指组件和第二手指组件分别可相对滑动地安装在所述直线导轨上;手爪支架上还设有联动机构,所述联动机构设有中连杆以及两个端连杆,所述中连杆可相对转动地安装于手爪支架上;其中一个端连杆的一端可相对转动地安装于中连杆的一端,端连杆的另一端可相对转动地与所述第一手指组件连接;另一个端连杆的一端可相对转动地安装于所述中连杆的另一端,端连杆的另一端可相对转动地与所述第二手指组件连接;所述手爪支架上还设有气缸,所述气缸的驱动轴与第一手指组件或者第二手指组件连接。
3、进一步地,所述第一手指组件和第二手指组件上分别设有第一手指,所述第一手指上分别设有v型垫块,且设置于第一手指组件上的v型垫块与设置于第二手指组件上的v型垫块对称设置,设置于第一手指组件上的v型垫块的v形开口朝向设置于第二手指组件上的v型垫块的v形开口。
4、进一步地,所述第一手指组件和第二手指组件上分别设有两个手指气缸,每个手指气缸的驱动轴上连接设置顶块;在第一手指组件上的两个手指气缸中,其中一个手指气缸的顶块设于上方,另一个手指气缸的顶块设于下方;在第二手指组件上的两个手指气缸中,其中一个手指气缸的顶块设于上方,另一个手指气缸的顶块设于下方。
5、优选地,所述第一手指组件和第二手指组件上设置的第一手指为内凹槽型结构且对称设置,所述v型垫块、手指气缸分别设置在第一手指的内凹槽中;在第一手指组件上的两个手指气缸中,其中一个手指气缸的顶块设于第一手指上方,另一个手指气缸的顶块设于第一手指下方;在第二手指组件上的两个手指气缸中,其中一个手指气缸的顶块设于第一手指上方,另一个手指气缸的顶块设于第一手指下方。
6、进一步地,所述第一手指组件和第二手指组件上分别设有第二手指,所述第二手指上分别设有矩形垫块,所述矩形垫块上设有若干半圆槽和/或方槽。
7、优选地,所述第一手指组件和第二手指组件上的矩形垫块对称设置。
8、优选地,所述第一手指组件和第二手指组件上分别设有第一手指和第二手指,其中两个第一手指设于两个第二手指之间,且第一手指和第二手指之间设有间隙。
9、进一步地,所述手爪支架包括矩形支架,所述矩形支架的一侧设有手腕连接板,矩形支架的另一侧上下部位分别设有一组直线导轨,两组直线导轨相互平行。
10、进一步地,所述矩形支架的中部设有联动安装部,所述中连杆的中部通过销轴可相对转动地安装于所述联动安装部上。
11、优选地,所述气缸安装于所述矩形支架的上方,气缸固定于所述矩形支架顶部和/或所述手腕连接板上;气缸安装于所述矩形支架顶部的一端,矩形支架顶部的另一端还设有撞块,所述撞块上还设有缓冲块。
12、在采取本实用新型提出的技术后,根据本实用新型实施例的关节机器人抓取模块,具有以下有益效果。
13、1)由于夹持工件时的反作用力均由抓取模块自身承担,关节机器人的手腕部只需要承担重力,不受抓取过程中的变化力量影响,能够实现更稳定可靠的夹持,且关节机器人的手腕部行程更稳定。
14、2)通过第一手指、顶块和第二手指的配合设置,能够适应多种情况下的夹持工作,可以夹持圆形方形工件、具有杆件的框架结构或者具有上下法兰面的工件,尤其是具备前述各种结构特征的复杂工件。
15、3)采用第一手指夹持、顶块夹持或第二手指夹持中任意两个夹持方式组合即可实现更稳定可靠夹持。若同时采用两种手指以及顶块进行多个部位、多个方向的夹持的话,不仅可以实现可靠夹持,而且所需力量较小,不会损坏工件。并且可以对工件的位置尤其是方位进行可靠的限定,使得工件在手腕组件上的位置是相对固定的,从而使得机械手的路线相对固定,在反复的工作中节约了寻位时间。
技术特征:
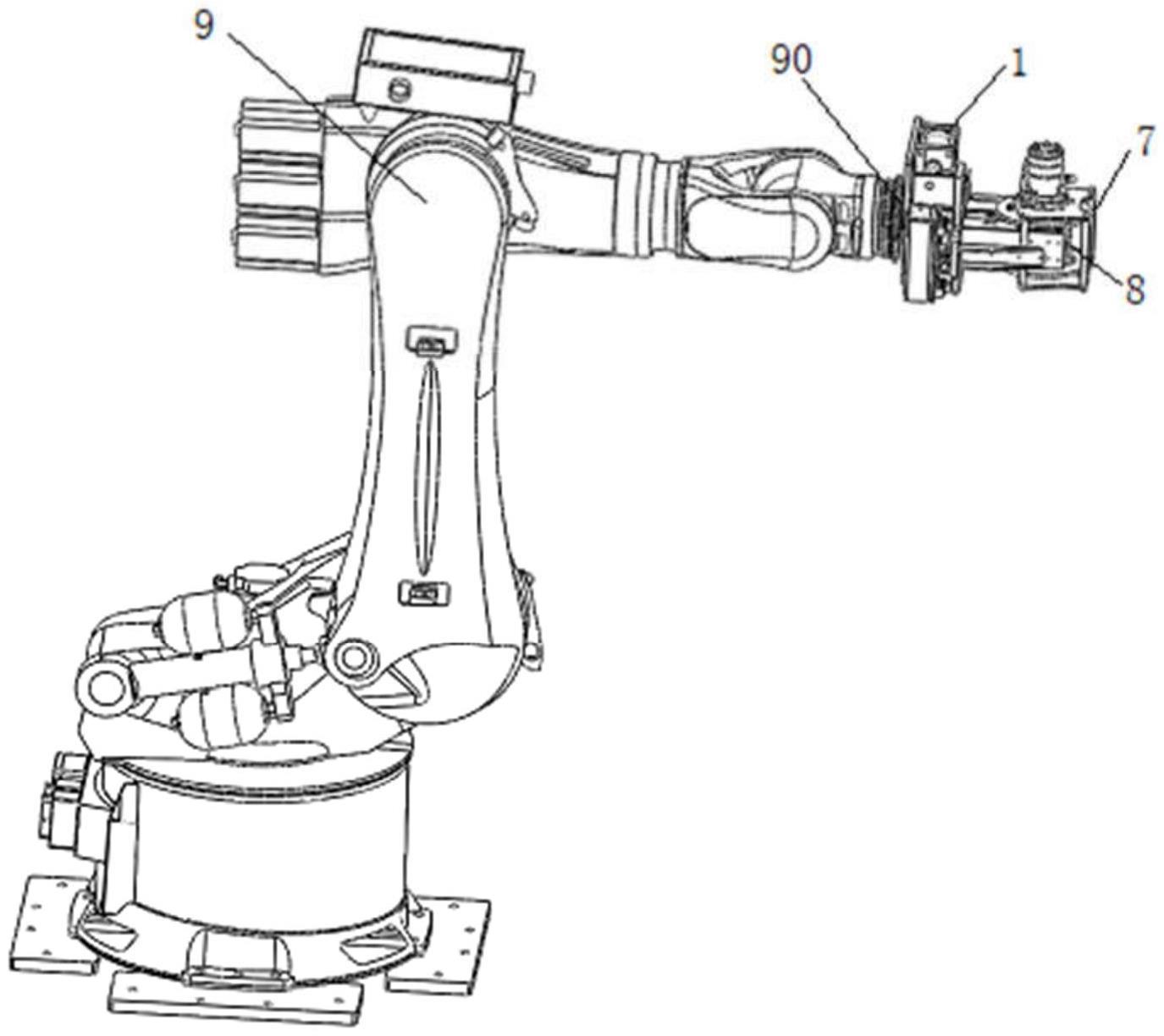
1.一种关节机器人抓取模块,其特征在于,包括手腕组件(1)、第一手指组件(2)以及第二手指组件(3),所述手腕组件(1)连接设置在关节机器人(9)的手腕部(90)上;所述手腕组件(1)设有手爪支架(10),所述手爪支架(10)上设有两组直线导轨(11),所述第一手指组件(2)和第二手指组件(3)分别可相对滑动地安装在所述直线导轨(11)上;手爪支架(10)上还设有联动机构(12),所述联动机构(12)设有中连杆(121)以及两个端连杆(122),所述中连杆(121)可相对转动地安装于手爪支架(10)上;其中一个端连杆(122)的一端可相对转动地安装于中连杆(121)的一端,端连杆(122)的另一端可相对转动地与所述第一手指组件(2)连接;另一个端连杆(122)的一端可相对转动地安装于所述中连杆(121)的另一端,端连杆(122)的另一端可相对转动地与所述第二手指组件(3)连接;所述手爪支架(10)上还设有气缸(4),所述气缸(4)的驱动轴(40)与第一手指组件(2)或者第二手指组件(3)连接。
2.根据权利要求1所述的一种关节机器人抓取模块,其特征在于,所述第一手指组件(2)和第二手指组件(3)上分别设有第一手指(5),所述第一手指(5)上分别设有v型垫块(51),且设置于第一手指组件(2)上的v型垫块(51)与设置于第二手指组件(3)上的v型垫块(51)对称设置,设置于第一手指组件(2)上的v型垫块(51)的v形开口朝向设置于第二手指组件(3)上的v型垫块(51)的v形开口。
3.根据权利要求2所述的一种关节机器人抓取模块,其特征在于,所述第一手指组件(2)和第二手指组件(3)上分别设有两个手指气缸(52),每个手指气缸(52)的驱动轴上连接设置顶块(53);在第一手指组件(2)上的两个手指气缸(52)中,其中一个手指气缸(52)的顶块(53)设于上方,另一个手指气缸(52)的顶块(53)设于下方;在第二手指组件(3)上的两个手指气缸(52)中,其中一个手指气缸(52)的顶块(53)设于上方,另一个手指气缸(52)的顶块(53)设于下方。
4.根据权利要求3所述的一种关节机器人抓取模块,其特征在于,所述第一手指组件(2)和第二手指组件(3)上设置的第一手指(5)为内凹槽型结构且对称设置,所述v型垫块(51)、手指气缸(52)分别设置在第一手指(5)的内凹槽中;在第一手指组件(2)上的两个手指气缸(52)中,其中一个手指气缸(52)的顶块(53)设于第一手指(5)上方,另一个手指气缸(52)的顶块(53)设于第一手指(5)下方;在第二手指组件(3)上的两个手指气缸(52)中,其中一个手指气缸(52)的顶块(53)设于第一手指(5)上方,另一个手指气缸(52)的顶块(53)设于第一手指(5)下方。
5.根据权利要求1所述的一种关节机器人抓取模块,其特征在于,所述第一手指组件(2)和第二手指组件(3)上分别设有第二手指(6),所述第二手指(6)上分别设有矩形垫块(61),所述矩形垫块(61)上设有若干半圆槽(62)和/或方槽(63)。
6.根据权利要求5所述的一种关节机器人抓取模块,其特征在于,所述第一手指组件(2)和第二手指组件(3)上的矩形垫块(61)对称设置。
7.根据权利要求1所述的一种关节机器人抓取模块,其特征在于,所述第一手指组件(2)和第二手指组件(3)上分别设有第一手指(5)和第二手指(6),其中两个第一手指(5)设于两个第二手指(6)之间,且第一手指(5)和第二手指(6)之间设有间隙。
8.根据权利要求1所述的一种关节机器人抓取模块,其特征在于,所述手爪支架(10)包括矩形支架(101),所述矩形支架(101)的一侧设有手腕连接板(100),矩形支架(101)的另一侧上下部位分别设有一组直线导轨(11),两组直线导轨(11)相互平行。
9.根据权利要求8所述的一种关节机器人抓取模块,其特征在于,所述矩形支架(101)的中部设有联动安装部(1010),所述中连杆(121)的中部通过销轴可相对转动地安装于所述联动安装部(1010)上。
10.根据权利要求9所述的一种关节机器人抓取模块,其特征在于,所述气缸(4)安装于所述矩形支架(101)的上方,气缸(4)固定于所述矩形支架(101)顶部和/或所述手腕连接板(100)上;气缸(4)安装于所述矩形支架(101)顶部的一端,矩形支架(101)顶部的另一端还设有撞块(41),所述撞块(41)上还设有缓冲块(42)。
技术总结
一种关节机器人抓取模块,包括手腕组件、第一手指组件以及第二手指组件,手腕组件连接设置在关节机器人的手腕部上;手腕组件设有手爪支架,手爪支架上设有两组直线导轨,第一手指组件和第二手指组件分别可相对滑动地安装在直线导轨上;手爪支架上还设有联动机构,联动机构设有中连杆以及两个端连杆,中连杆可相对转动地安装于手爪支架上;其中一个端连杆的一端可相对转动地安装于中连杆的一端,端连杆的另一端可相对转动地与第一手指组件连接;另一个端连杆的一端可相对转动地安装于中连杆的另一端,端连杆的另一端可相对转动地与第二手指组件连接。以更加可靠地夹持复杂工件,防止工件滑动或掉落。
技术研发人员:柴赟,华哲,庾永健
受保护的技术使用者:常州莫森智能科技有限公司
技术研发日:20221207
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!