安装座及机器人的制作方法
本技术属于机器人领域,更具体而言,涉及一种安装座及机器人。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。机械手安装的过程中需要使用安装座,从而可以将机械手进行固定安装使用,受机械手行程的影响,安装座的高度需要有不同规格,而目前的安装座多是由方钢架与不锈钢板组成的固定规格的安装座,在使用的过程中安装座的高度调节不便且安装费时费力。
技术实现思路
1、本实用新型实施例的目的在于提供一种安装座及机器人,以解决现有技术中存在的安装座高度调节不便的技术问题。
2、为实现上述目的,本实用新型采用的技术方案是:
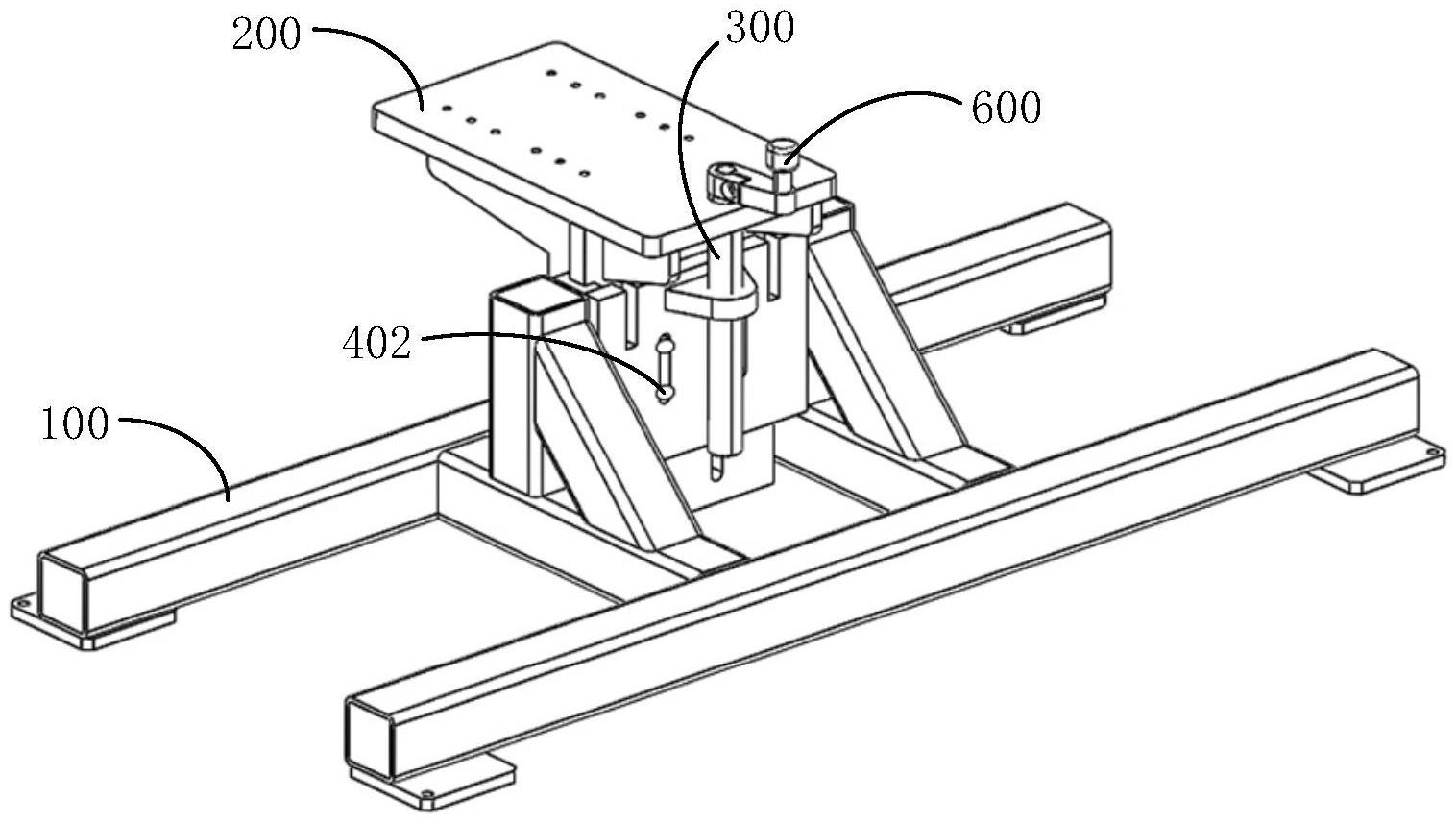
3、一方面,本实用新型提供了一种安装座,包括:
4、基座,形成螺孔;
5、安装件;
6、螺杆,具有中轴,所述螺杆连接于所述安装件,并通过所述螺孔螺纹连接于所述基座;所述螺杆用于相对于所述基座转动以带动所述安装件相对于所述基座沿所述中轴运动;
7、紧固结构,连接于所述基座,用于连接于所述安装件以限制所述安装件相对于所述基座沿所述中轴运动,还用于分离于所述安装件以开放所述安装件相对于所述基座沿所述中轴运动。
8、本实用新型中所提供的一种安装座,其中螺杆通过螺纹连接于基座,安装件连接于螺杆,可通过螺杆转动以带动安装件远离或靠近基座,相较于现有技术,本实用新型提供了一种高度可灵活调节的基座。另外安装件在调节到所需高度后,紧固结构可将安装件和基座的位置形成相对固定的位置关系,减少螺杆的螺牙受力,提高了使用寿命。
9、在一些实现方式中,所述紧固结构包括导向件和锁紧件;
10、所述导向件连接于所述基座;
11、所述锁紧件连接于所述导向件,并用于相对于所述导向件移动以靠近或远离所述基座,所述锁紧件和所述基座之间形成夹持空间;
12、所述安装件的至少一部分设置于所述夹持空间内,并用于与所述锁紧件抵接或分离。
13、本实用新型中所提供的一种安装座,通过导向件和基座连接,并在导向件上设置可沿导向件移动的锁紧件,使锁紧件和基座之间形成夹持空间,通过调整夹持空间的相对距离可以放开或限制安装件和基座之间的相对移动,结构简洁却实用有效。
14、在一些实现方式中,所述安装件上设置有导向孔;
15、所述导向件穿过所述导向孔,并用于在所述导向孔内沿所述中轴的方向运动;
16、所述锁紧件和所述基座位于所述导向孔的两侧。
17、本实用新型中所提供的一种安装座,通过导向件穿过开设在安装件上的导向孔可使紧固结构和基座以及安装件在结构上相互联结,提高了安装座结构的整体性,便于转换工况使用,使用灵活。
18、在一些实现方式中,沿所述中轴延伸的方向,所述安装件上并排设置有多组所述第一导向孔。
19、本实用新型中所提供的一种安装座,安装件上并排设置多组第一导向孔,可以根据使用场景灵活调节安装件相对于基座的高度行程,具有十分灵活的使用效果。
20、在一些实现方式中,所述螺杆沿所述中轴的方向抵接于所述安装件,以用于避免所述安装件跟转所述螺杆。
21、本实用新型中所提供的一种安装座,利用螺杆沿中轴方向抵接于安装件可避免安装件跟转螺杆,具有更加广泛的应用场景。
22、在一些实现方式中,所述安装件上设置有供所述螺杆部分通过的通孔;
23、所述螺杆沿所述中轴的方向形成具有不同直径尺寸的两部分,其中具有较小直径尺寸的一部分所述螺杆穿过所述通孔;两部分的所述螺杆之间形成台阶面,所述台阶面用于与所述安装件抵接。
24、本实用新型中所提供的一种安装座,提供了一种螺杆抵接于安装件的具体形式,螺杆通过安装件上设置的通孔与安装件抵接,可以在保证螺杆沿中轴方向抵接于安装件的同时,限制螺杆和安装件在垂直于螺杆中轴方向上的相对移动。
25、在一些实现方式中,还包括转动手柄;
26、所述转动手柄连接于所述螺杆穿过所述通孔的一端,并朝向垂直于所述中轴且远离所述螺杆的方向延伸,以用于增大所述螺杆的转动力臂。
27、本实用新型中所提供的一种安装座,螺杆上连接有转动手柄并利用转动手柄增加了螺杆了转动力臂,具有螺杆转动较为省力的技术效果。
28、在一些实现方式中,所述基座上设置有沿所述中轴延伸方向的滑槽,所述安装件通过所述滑槽滑动连接于所述基座。
29、本实用新型中所提供的一种安装座,利用基座上设置的滑槽作为安装件的引导结构,以用于引导安装件在螺杆中轴方向上的移动,显著的提高了安装件移动的稳定性。
30、在一些实现方式中,所述安装件上具有用于连接外接结构的预设安装位。
31、本实用新型中所提供的一种安装座,通过在安装件上设置用于连接外接结构的预设安装位,可以快速的适配于多种工况,简化安装难度。
32、另一方面,本实用新型还提供了一种机器人,包括:
33、机械手;
34、如前所述的任一种安装座;
35、所述机械手连接于所述安装件。
36、本实用新型中所提供的一种机器人,包括有本实用新型所提供的一种安装座,通过可以相对于基座移动的安装件以及安装件上所设置的预设安装位,不仅可以灵活调整机械手的安装位置,而且安装座的高度可调节,可适用于不同工作行程的机械手,使用方便灵活。
技术特征:
1.一种安装座,其特征在于,包括:
2.根据权利要求1所述的安装座,其特征在于,
3.根据权利要求2所述的安装座,其特征在于,
4.根据权利要求3所述的安装座,其特征在于,
5.根据权利要求1所述的安装座,其特征在于,
6.根据权利要求5所述的安装座,其特征在于,
7.根据权利要求6所述的安装座,其特征在于,
8.根据权利要求5所述的安装座,其特征在于,
9.根据权利要求1所述的安装座,其特征在于,
10.一种机器人,其特征在于,包括:
技术总结
本技术属于机器人领域,更具体而言,涉及一种安装座及机器人。其中安装座,包括基座,形成螺孔;安装件;螺杆,具有中轴,所述螺杆连接于所述安装件,并通过所述螺孔螺纹连接于所述基座;所述螺杆用于相对于所述基座转动以带动所述安装件相对于所述基座沿所述中轴运动;紧固结构,连接于所述基座,用于连接于所述安装件以限制所述安装件相对于所述基座沿所述中轴运动,还用于分离于所述安装件以开放所述安装件相对于所述基座沿所述中轴运动。本技术提供了一种高度可灵活调节的基座。另外安装件在调节到所需高度后,紧固结构可将安装件和基座的位置形成相对固定的位置关系,减少螺杆的螺牙受力,提高了使用寿命。
技术研发人员:谭偲龙,刘奕峰,曾甜,范志杰,喻俊霖
受保护的技术使用者:湖南长城计算机系统有限公司
技术研发日:20221207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!