一种塑料产品自动夹取机械手的制作方法
本技术涉及塑料加工设备,特别是一种塑料产品自动夹取机械手。
背景技术:
1、塑料产品是人们生产生活中的常见物品,目前已经是人们工作生活中不可或缺的部分,塑料产品在完成加工送料时由于塑料本身的可塑性,需要避免与夹具直接接触,为了避免直接夹取塑料产品对其造成损坏,部分厂家选择在转送塑料产品时保留塑料产品顶部注塑时产生的水口,转送时通过对其水口夹取以避免直接夹取塑料产品对其造成损坏,送至下一工序后在对其水口进行修剪。
2、在中国专利cn217376434u中公开的一种塑料产品自动夹取机械手,虽然通过真空管道使吸嘴在夹板内表面与产品的接触位置处形成真空,吸附住产品,爪升降柱移动使夹爪上升,水平位移驱动机构驱动夹爪进行横向与纵向位移,移动至下料位置正上方,伺服电机关闭使驱动转轴复位,使夹爪升降柱底部两侧的夹板松开,产品落下完成夹取转送,转送过程自动进行,虽然能够实现塑料产品的转移,但是该塑料产品自动夹取机械手在使用时还存在以下缺点:
3、该塑料产品自动夹取机械手,虽然增加真空泵、吸气管道和吸嘴,对水口进行夹紧,但是位于水口一侧的零件所处位置相对开放,在该机械手运动时会产生振动,振动量级较大时,零件会与水口相脱离,而自行坠落,进而导致零件出现质量缺陷,影响产品品质,因此需要对此进行改进,已解决上述问题。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供一种塑料产品自动夹取机械手,有效解决了现有技术的不足。
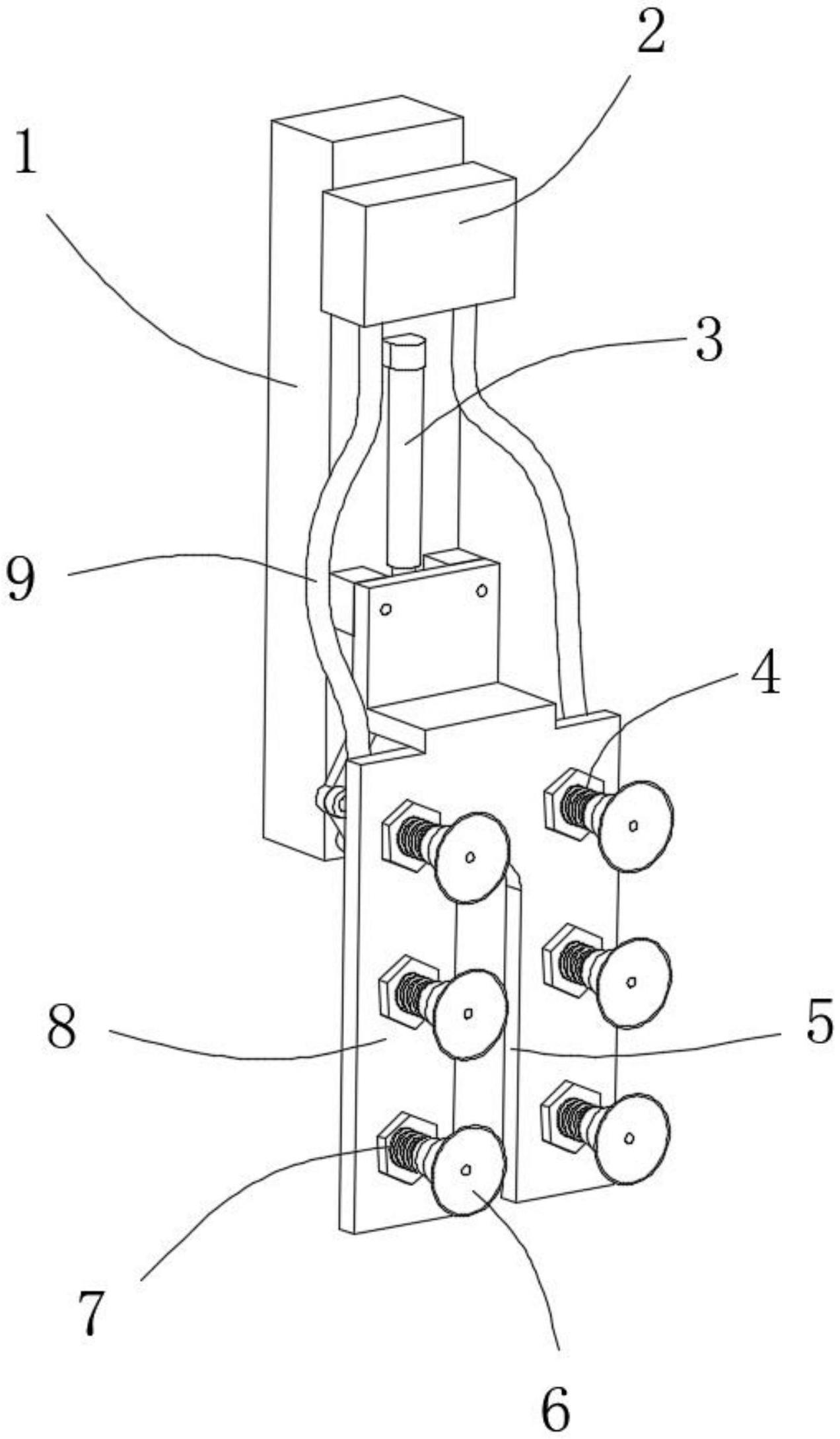
2、为了实现上述目的,本实用新型一方面的实施例提供了一种塑料产品自动夹取机械手,包括升降杆,所述升降杆底端的一侧固定连接有电动推杆,所述电动推杆的底端转动连接有两个连接杆,所述升降杆底端的一侧转动连接有夹指,两个所述夹指的顶端分别与两个连接杆的底端转动连接,相邻两个夹指侧面的底端均开设有四个限位凹槽,所述升降杆靠近电动推杆的一侧固定连接有限位板,所述限位板的侧面设置有六个限位管,六个所述限位管均完全贯穿限位板,两个所述限位管的另一端均螺纹连接有锁紧螺母,六个所述限位管的内部均滑动连接有t形管,六个所述t形管的一端均螺纹连接有固定头,六个所述t形管的外壁均设置有弹簧,六个所述固定头的外壁均套接连接有吸嘴,所述升降杆靠近电动推杆的侧面固定连接有真空泵,所述真空泵的底端固定连接有两个气管,两个所述气管的底端依次与三个t形管的一端相连通。
3、由上述任一方案优选的是,两个所述连接杆的两端均通过销钉分别与电动推杆的底端和两个夹指的顶端转动连接,通过使用该方案便于和两个夹指形成稳定的杠杆机构,从而便于推动两个夹指进行转动,对水口进行稳定夹紧,而八个限位凹槽便于对水口进行限位,从而防止水口出现移动。
4、由上述任一方案优选的是,所述限位板的顶端通过螺栓与升降杆固定连接,所述限位板的一侧开设有u形槽,所述u形槽位于六个限位管之间,该方案通过设置u形槽,从而便于使水口的一端能够穿过,并进入至两个夹指之间。
5、由上述任一方案优选的是,六个所述t形管的一端通过气管首尾顺次连接,且位于最底端的两个气管弯折并使用扎带进行扎紧,通过使用该方案便于对气管的底端进行密封,防止出现漏气现象,使外部的空气只能通过吸嘴进入,从而便于对零件进行牢牢吸紧。
6、由上述任一方案优选的是,六个所述弹簧分别位于六个限位管和六个固定头之间,通过使用该方案便于当升降杆在外部驱动机构下在次向零件方向移动时,六个固定头能够对弹簧进行压缩,从而用于补偿升降杆移动时的误差,同时避免对零件造成损伤。
7、由上述任一方案优选的是,八个所述凹槽的外形均为弧形,并两两相对,通过使用该方案为水口提供限位,在两个夹指对水口夹紧口,防止水口出现滚滑移动,保证整体的夹紧稳定性。
8、本实用新型具有以下优点:
9、1、该一种塑料产品自动夹取机械手,通过设置电动推杆、两个连接杆和两个夹指,同时两个夹指的侧面均开设有四个限位凹槽,进而电动推杆伸长动作,通过两个连接杆使两个夹指进行转动,从而便于对水口进行夹紧,通过设置真空泵、两个气管、六个t形管和六个吸嘴,真空泵运行,并产生负压,从而通过两个气管作用在六个吸嘴上,六个吸嘴便于对水口边缘上的零件进行吸紧,从而便于将水口和零件进行完全限位,从而避免移动过程中,零件出现掉落,而发生质量问题,有效解决现有技术中所存在的问题。
10、2、该一种塑料产品自动夹取机械手,通过设置两个连接杆,且两个连接杆的两端均通过销钉分别与电动推杆的底端和两个夹指的顶端转动连接,进而便于和两个夹指形成稳定的杠杆机构,从而便于推动两个夹指进行转动,对水口进行稳定夹紧,而八个限位凹槽便于对水口进行限位,从而防止水口出现移动。
11、3、该一种塑料产品自动夹取机械手,通过六个t形管、六个弹簧、六个固定头,而六个固定头分别与六个t形管的一端螺纹连接,从而便于进行前期的安装以及后期的拆卸更换,通过六个弹簧分别位于六个限位管和六个固定头之间,当吸嘴与零件相接触后,当升降杆在外部驱动机构下在次向零件方向移动时,六个固定头能够对弹簧进行压缩,从而用于补偿升降杆移动时的误差,同时避免对零件造成损伤。
技术特征:
1.一种塑料产品自动夹取机械手,其特征在于:包括升降杆(1),所述升降杆(1)底端的一侧固定连接有电动推杆(3),所述电动推杆(3)的底端转动连接有两个连接杆(10),所述升降杆(1)底端的一侧转动连接有夹指(15),两个所述夹指(15)的顶端分别与两个连接杆(10)的底端转动连接,相邻两个夹指(15)侧面的底端均开设有四个限位凹槽(14),所述升降杆(1)靠近电动推杆(3)的一侧固定连接有限位板(8),所述限位板(8)的侧面设置有六个限位管(7),六个所述限位管(7)均完全贯穿限位板(8),两个所述限位管(7)的另一端均螺纹连接有锁紧螺母(12),六个所述限位管(7)的内部均滑动连接有t形管(11),六个所述t形管(11)的一端均螺纹连接有固定头(13),六个所述t形管(11)的外壁均设置有弹簧(4),六个所述固定头(13)的外壁均套接连接有吸嘴(6),所述升降杆(1)靠近电动推杆(3)的侧面固定连接有真空泵(2),所述真空泵(2)的底端固定连接有两个气管(9),两个所述气管(9)的底端依次与三个t形管(11)的一端相连通。
2.根据权利要求1所述的一种塑料产品自动夹取机械手,其特征在于:两个所述连接杆(10)的两端均通过销钉分别与电动推杆(3)的底端和两个夹指(15)的顶端转动连接。
3.根据权利要求2所述的一种塑料产品自动夹取机械手,其特征在于:所述限位板(8)的顶端通过螺栓与升降杆(1)固定连接,所述限位板(8)的一侧开设有u形槽(5),所述u形槽(5)位于六个限位管(7)之间。
4.根据权利要求3所述的一种塑料产品自动夹取机械手,其特征在于:六个所述t形管(11)的一端通过气管(9)首尾顺次连接,且位于最底端的两个气管(9)弯折并使用扎带进行扎紧。
5.根据权利要求4所述的一种塑料产品自动夹取机械手,其特征在于:六个所述弹簧(4)分别位于六个限位管(7)和六个固定头(13)之间。
6.根据权利要求5所述的一种塑料产品自动夹取机械手,其特征在于:八个所述凹槽(14)的外形均为弧形,并两两相对。
技术总结
本技术涉及塑料加工设备技术领域,特别是一种塑料产品自动夹取机械手,包括升降杆,所述升降杆底端的一侧固定连接有电动推杆。本技术的优点在于:通过设置电动推杆、两个连接杆和两个夹指,同时两个夹指的侧面均开设有四个限位凹槽,进而电动推杆伸长动作,通过两个连接杆使两个夹指进行转动,从而便于对水口进行夹紧,通过设置真空泵、两个气管、六个T形管和六个吸嘴,进而真空泵运行,并产生负压,从而通过两个气管作用在六个吸嘴上,六个吸嘴便于对水口边缘上的零件进行吸紧,从而便于将水口和零件进行完全限位,从而避免移动过程中,零件出现掉落,而发生质量问题,有效解决现有技术中所存在的问题。
技术研发人员:许杰
受保护的技术使用者:昆山宇辉虹应用材料有限公司
技术研发日:20221212
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!