一种分拣机械手的制作方法
本技术属于自动分拣,尤其涉及一种分拣机械手。
背景技术:
1、随着互联网的飞速发展,网购的诞生给人们带来了许多便利,网络购物也使得快递行业的诞生,并且蓬勃发展,物流公司的快递越来越多,导致分拣工作强度较大,尤其在夏天,工作环境非常闷热,多数工人容易出现呼吸不畅的情况,人工分拣已经无法满足分拣需求了,因此有必要使用机械来代替人工进行分拣工作。
2、需要说明的是,上述内容属于发明人的技术认知范畴,并不必然构成现有技术。
技术实现思路
1、为了解决上述问题,本实用新型的目的是提供一种分拣机械手,具有可以自动识别,并分拣相对应的快递包裹,而且机械手使用灵活,进一步满足使用需求的优点。
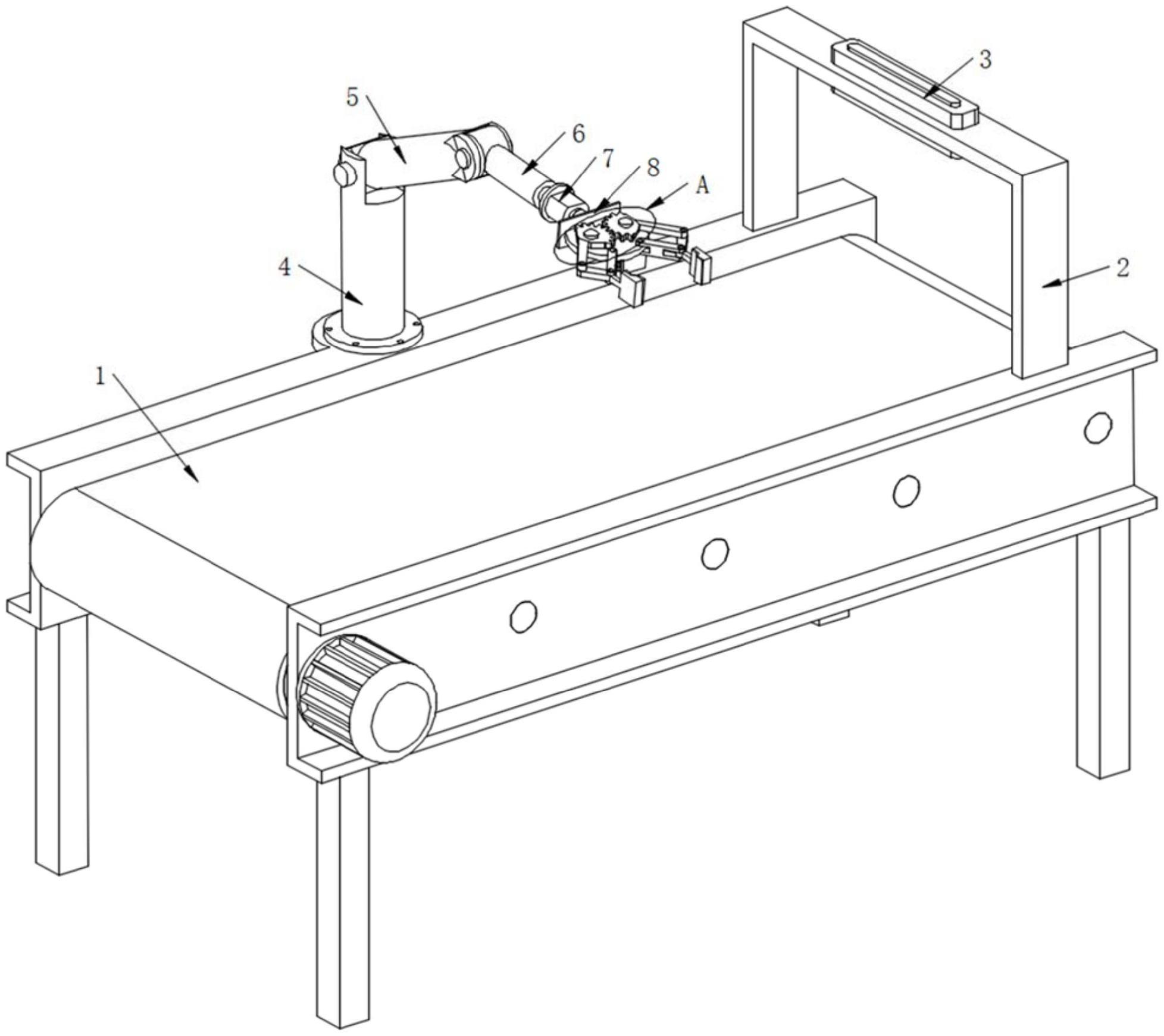
2、为实现上述目的,本实用新型提出了一种分拣机械手,包括输送线,所述输送线的顶部固定有支架,所述支架上安装有识别系统,所述输送线的顶部转动连接有安装柱,所述安装柱的顶部转动连接有上臂,所述上臂的另一端转动连接有气缸,所述气缸的输出端固定有马达,所述马达的输出轴固定有安装板,所述安装板的表面固定有支板,所述支板上通过销轴对称转动连接有两个连杆,两个所述连杆的另一端均通过销轴转动连接有夹爪,所述支板上设置有用于驱动两个夹爪转动的驱动机构。
3、在一个示例中,所述输送线上设置有用于驱动安装柱、上臂和气缸转动的动力机构。
4、在一个示例中,所述驱动机构包括通过轴承对称转动连接在支板上的两个转杆,两个所述转杆的一端均套设固定有扇形齿轮,两个所述扇形齿轮啮合,所述支板的一表面固定有伺服电机,所述伺服电机的输出轴与相邻转杆的一端固定连接,所述扇形齿轮的表面均固定有杆体,所述杆体的端部均通过销轴分别与相邻夹爪的端部转动连接。
5、在一个示例中,两个所述夹爪的端部相对的一面均固定有防滑垫。
6、在一个示例中,所述支板设置为圆弧状,所述支板的表面对称开设有两个安装孔,两个所述转杆均通过轴承分别转动连接在相对应的安装孔内。
7、在一个示例中,所述支板的表面对称开设有两个通孔,两个所述连杆一端的销轴均分别安装在相邻的通孔内。
8、通过本实用新型提出的一种分拣机械手能够带来如下有益效果:
9、1.本实用新型,通过设置识别系统、安装柱、上臂、气缸、马达、支板、连杆、夹爪和驱动机构相配合,可以实现对快递包裹的自动分拣,节省人力,降低工人的工作强度,而且夹爪的夹取活动范围大,使用起来非常灵活。
10、2.本实用新型,通过驱动机构中设置的扇形齿轮和杆体,配合连杆的机械结构,这种夹取方式所需动力装置较少,从而可以节约用电。
技术特征:
1.一种分拣机械手,其特征在于,包括输送线(1),所述输送线(1)的顶部固定有支架(2),所述支架(2)上安装有识别系统(3),所述输送线(1)的顶部转动连接有安装柱(4),所述安装柱(4)的顶部转动连接有上臂(5),所述上臂(5)的另一端转动连接有气缸(6),所述气缸(6)的输出端固定有马达(7),所述马达(7)的输出轴固定有安装板(8),所述安装板(8)的表面固定有支板(9),所述支板(9)上通过销轴对称转动连接有两个连杆(10),两个所述连杆(10)的另一端均通过销轴转动连接有夹爪(11),所述支板(9)上设置有用于驱动两个夹爪(11)转动的驱动机构(12)。
2.根据权利要求1所述的一种分拣机械手,其特征在于,所述输送线(1)上设置有用于驱动安装柱(4)、上臂(5)和气缸(6)转动的动力机构。
3.根据权利要求1所述的一种分拣机械手,其特征在于,所述驱动机构(12)包括通过轴承对称转动连接在支板(9)上的两个转杆(1201),两个所述转杆(1201)的一端均套设固定有扇形齿轮(1202),两个所述扇形齿轮(1202)啮合,所述支板(9)的一表面固定有伺服电机(1203),所述伺服电机(1203)的输出轴与相邻转杆(1201)的一端固定连接,所述扇形齿轮(1202)的表面均固定有杆体(1204),所述杆体(1204)的端部均通过销轴分别与相邻夹爪(11)的端部转动连接。
4.根据权利要求1所述的一种分拣机械手,其特征在于,两个所述夹爪(11)的端部相对的一面均固定有防滑垫(13)。
5.根据权利要求3所述的一种分拣机械手,其特征在于,所述支板(9)设置为圆弧状,所述支板(9)的表面对称开设有两个安装孔(1205),两个所述转杆(1201)均通过轴承分别转动连接在相对应的安装孔(1205)内。
6.根据权利要求1所述的一种分拣机械手,其特征在于,所述支板(9)的表面对称开设有两个通孔(14),两个所述连杆(10)一端的销轴均分别安装在相邻的通孔(14)内。
技术总结
本技术公开了一种分拣机械手,包括输送线,所述输送线的顶部固定有支架,所述支架上安装有识别系统,所述输送线的顶部转动连接有安装柱,所述安装柱的顶部转动连接有上臂,所述上臂的另一端转动连接有气缸,所述气缸的输出端固定有马达,所述马达的输出轴固定有安装板。本技术通过设置识别系统、安装柱、上臂、气缸、马达、支板、连杆、夹爪和驱动机构相配合,可以实现对快递包裹的自动分拣,节省人力,降低工人的工作强度,而且夹爪的夹取活动范围大,使用起来非常灵活,通过驱动机构中设置的扇形齿轮和杆体,配合连杆的机械结构,这种夹取方式所需动力装置较少,从而可以节约用电。
技术研发人员:谭元金
受保护的技术使用者:太仓博超精密机械设备有限公司
技术研发日:20221214
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!