一种半自动助力机械抓手的制作方法
本技术涉及机械抓手,具体涉及一种半自动助力机械抓手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,半自动助力机械手则是部分步骤需要人为进行操控的机械手,经过检索,现有技术(申请号:cn202221093415.4),文中记载了“一种半自动助力机械手,涉及机械手技术领域,包括底脚,还包括固定结构以及升降结构,所述底脚的顶端安装有底板,且底板的顶端中间位置处安装有两个放置台,所述底板顶端的两侧均安装有支撑柱,且支撑柱的顶端安装有顶板,所述顶板的一侧安装有第一伺服电机,且顶板的内部开设有第一空腔,所述第一伺服电机的输出端安装有第一单向螺纹杆,所述第一单向螺纹杆的外壁通过螺纹连接有第三螺纹块。本实用新型通过调节旋钮的旋转方向,使第一螺纹块在第二单向螺纹杆的外壁向相互靠近的方向移动,通过第一螺纹块即可带动机械夹臂,通过机械夹臂将物品进行固定,该结构实现了对待输送物品的紧固,防止物品脱落造成损坏。”
2、但是现有技术中的半自动助力机械手通过手动旋转旋扭驱动夹臂对物品进行夹持,旋扭自身缺少自锁功能,进而在水平移动中夹臂的夹持力容易松弛,造成物品掉落,且对于表面光滑且质量较重的物品夹臂就更不易将其夹持,其次,夹持角度不可调节,对于摆放的物品可能在夹持方向的宽度超过夹臂最大夹距,而对于较重的物品通过手动移动角度较为吃力,进而导致机械抓手工作效率较低。
技术实现思路
1、为克服现有技术所存在的缺陷,现提供一种半自动助力机械抓手,以解决现有技术中的半自动助力机械手在夹持移动过程中容易导致物品滑落,且不能调节夹臂的夹持角度的问题。
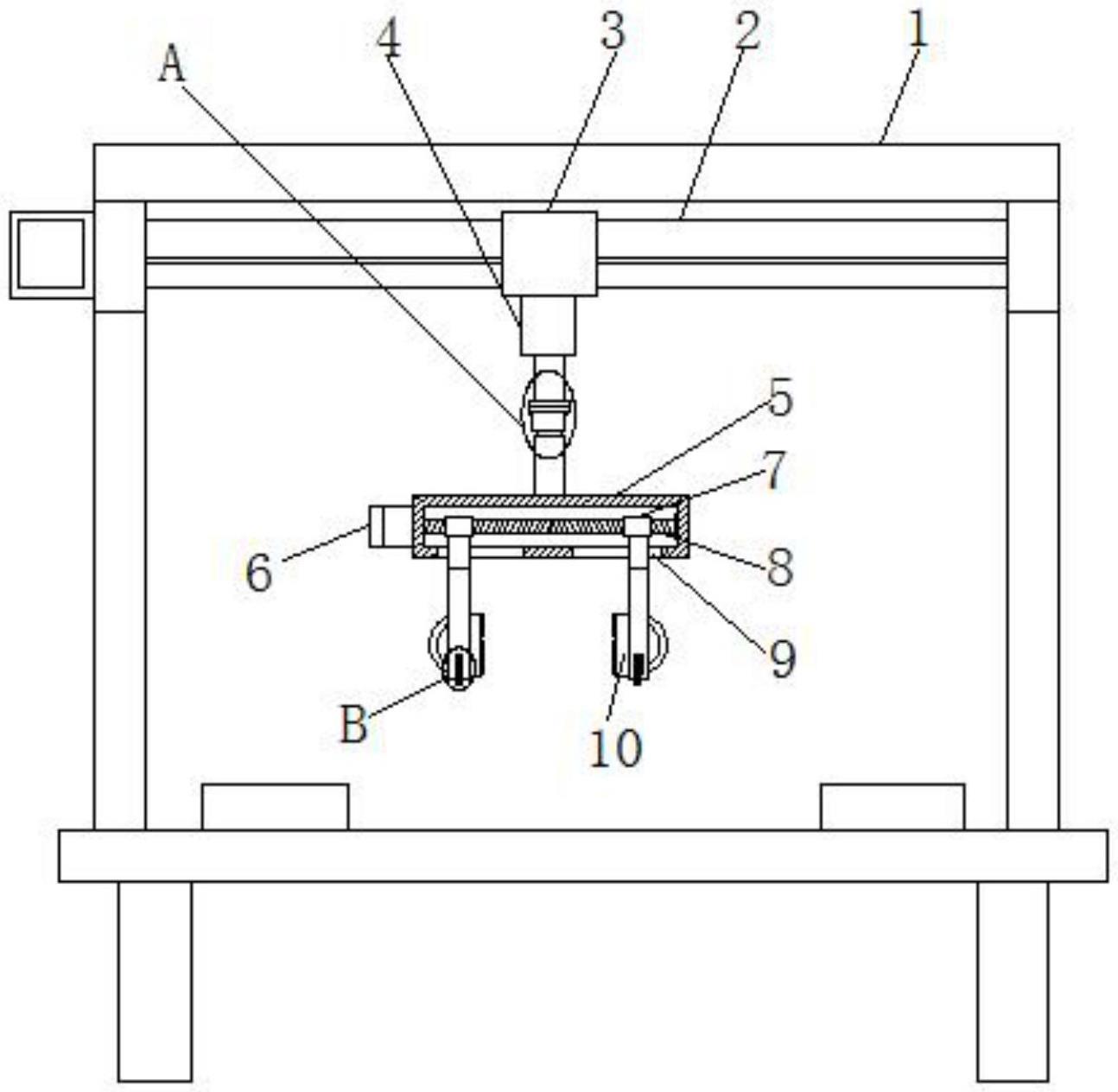
2、为实现上述目的,提供一种半自动助力机械抓手,包括:机台和驱动箱,所述机台的上端设置电滑轨,且电滑轨的外侧滑动连接有滑动块,并且滑动块的下端通过螺栓固定有液压杆,所述驱动箱的外端安装有电机,且驱动箱的内部设置有双螺牙螺杆,双螺牙螺杆的左端电机连接,并且双螺牙螺杆的外侧螺接有螺接块,所述液压杆的下端焊接有安装板,且安装板的下端通过螺栓固定有转轴阻尼器,转轴阻尼器的下端转动连接有连接轴,并且连接轴的下端焊接有固定轴,固定轴的下端焊接在驱动箱的上端,所述螺接块的下端连接有夹持组件,且夹持组件包括有上端的连接板,连接板的下端焊接有外夹板,并且外夹板的外端焊接有手柄,外夹板的内侧焊接有内夹板,所述外夹板的底部连接有监测装置,且监测装置包括有安装块,安装块与外夹板滑动连接,并且安装块下端安装有光电感应器。
3、进一步的,所述驱动箱的下端开设有导向槽,且连接板滑动连接在导向槽内部,并且导向槽设置为两个相互独立的开口槽结构。
4、进一步的,所述连接板的长宽小于外夹板,且外夹板和内夹板皆设置为矩形板结构,并且内夹板的内侧端面粘接有橡胶材质的圆锥形防滑凸粒。
5、进一步的,所述手柄对称焊接在外夹板的外端面,且手柄设置为弧形结构,并且手柄的外侧套装有橡胶套。
6、进一步的,所述外夹板的下端开设有滑槽,且滑槽的内部设置有弹簧,并且弹簧的下端设置有滑块,滑块的下端与安装块焊接固定。
7、进一步的,所述安装块的内侧端开设有安装孔,且光电感应器安装在安装孔内部,并且光电感应器的前端设置有塑料片,塑料封装在安装孔的内侧端口与外夹板端面平齐。
8、进一步的,所述安装块的下端在初始状态低于外夹板的下端,且光电感应器通过外部的单片机控制器与电机电性连接。
9、本实用新型的有益效果在于,利用驱动箱内部的结构便于驱动外夹板相对移动将物品夹持,在移动过程中,若出现物品下滑被监测装置所包括的光电感应器感应,然后控制电机再次启动将外夹板向内侧推进,提高夹紧力度,避免表面光滑或者质量较重的物品滑落;利用固定轴、连接轴、转轴阻尼器和安装板,便于通过手柄将驱动箱整体转动,使得外夹板的夹持角度适应物体的夹持宽度,避免了移动物品费时费力的现象。
技术特征:
1.一种半自动助力机械抓手,包括:机台(1)和驱动箱(5),所述机台(1)的上端设置电滑轨(2),且电滑轨(2)的外侧滑动连接有滑动块(3),并且滑动块(3)的下端通过螺栓固定有液压杆(4),所述驱动箱(5)的外端安装有电机(6),且驱动箱(5)的内部设置有双螺牙螺杆(8),双螺牙螺杆(8)的左端电机(6)连接,并且双螺牙螺杆(8)的外侧螺接有螺接块(7),其特征在于:所述液压杆(4)的下端焊接有安装板(11),且安装板(11)的下端通过螺栓固定有转轴阻尼器(12),转轴阻尼器(12)的下端转动连接有连接轴(13),并且连接轴(13)的下端焊接有固定轴(14),固定轴(14)的下端焊接在驱动箱(5)的上端,所述螺接块(7)的下端连接有夹持组件(10),且夹持组件(10)包括有上端的连接板(101),连接板(101)的下端焊接有外夹板(102),并且外夹板(102)的外端焊接有手柄(104),外夹板(102)的内侧焊接有内夹板(103),所述外夹板(102)的底部连接有监测装置(15),且监测装置(15)包括有安装块(154),安装块(154)与外夹板(102)滑动连接,并且安装块(154)下端安装有光电感应器(155)。
2.根据权利要求1所述的一种半自动助力机械抓手,其特征在于,所述驱动箱(5)的下端开设有导向槽(9),且连接板(101)滑动连接在导向槽(9)内部,并且导向槽(9)设置为两个相互独立的开口槽结构。
3.根据权利要求1所述的一种半自动助力机械抓手,其特征在于,所述连接板(101)的长宽小于外夹板(102),且外夹板(102)和内夹板(103)皆设置为矩形板结构,并且内夹板(103)的内侧端面粘接有橡胶材质的圆锥形防滑凸粒。
4.根据权利要求1所述的一种半自动助力机械抓手,其特征在于,所述手柄(104)对称焊接在外夹板(102)的外端面,且手柄(104)设置为弧形结构,并且手柄(104)的外侧套装有橡胶套。
5.根据权利要求1所述的一种半自动助力机械抓手,其特征在于,所述外夹板(102)的下端开设有滑槽(151),且滑槽(151)的内部设置有弹簧(152),并且弹簧(152)的下端设置有滑块(153),滑块(153)的下端与安装块(154)焊接固定。
6.根据权利要求1所述的一种半自动助力机械抓手,其特征在于,所述安装块(154)的内侧端开设有安装孔,且光电感应器(155)安装在安装孔内部,并且光电感应器(155)的前端设置有塑料片,塑料封装在安装孔的内侧端口与外夹板(102)端面平齐。
7.根据权利要求1所述的一种半自动助力机械抓手,其特征在于,所述安装块(154)的下端在初始状态低于外夹板(102)的下端,且光电感应器(155)通过外部的单片机控制器与电机(6)电性连接。
技术总结
本技术提供了一种半自动助力机械抓手,涉及机械抓手领域,包括:机台和驱动箱,所述机台的上端设置电滑轨,且电滑轨的外侧滑动连接有滑动块,并且滑动块的下端通过螺栓固定有液压杆,所述驱动箱的外端安装有电机,且驱动箱的内部设置有双螺牙螺杆,双螺牙螺杆的左端电机连接,并且双螺牙螺杆的外侧螺接有螺接块,所述液压杆的下端焊接有安装板,且安装板的下端通过螺栓固定有转轴阻尼器,转轴阻尼器的下端转动连接有连接轴。本技术解决了现有技术中的半自动助力机械手在夹持移动过程中容易导致物品滑落,且不能调节夹臂的夹持角度问题。
技术研发人员:朱磊
受保护的技术使用者:天津弘亚模具有限公司
技术研发日:20221213
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!