一种摄像机轨道机器人轨道车的制作方法
本技术涉及摄影器材,特别是涉及摄像机轨道机器人及其平移轨道车。
背景技术:
1、影视剧以及各类视频产品在拍摄时经常用到大型摄影摄像设备。现有技术中会用到工业机器人机械手来安装这些大型摄影摄像设备,将摄影摄像设备安装在机械手的手部,机械手带动摄影摄像设备做各种旋转和平移。
2、在某些场景中,机械手的底座需要沿轨道移动,使得摄像机能够按要求移动。摄像机需要经常切换拍摄场景,需要经常换到不同的轨道安装和拆卸,对机械手的安装、拆卸的方便程度有较高的要求。同时,由于摄像机较为昂贵,为了防止出现机械手与轨道的安装不稳造成设备的损伤,对机械手与轨道的结合也有较高的要求。
3、例如,中国实用新型专利公告号cn 212617182 u公开了一种方便拆装的摄像轨道车,包括支架,支架可以通过滑座与轨道接触,使得轨道车能沿轨道移动,支架5上方设置快拆结构,摄像机3通过快拆结构与支架5安装,可以将摄像机从快拆结构上快速拆装,但是其支架还是留在轨道上。在有多条轨道的复杂场景中,如果支架较轻,工作人员可以将支架抬起并移至另一条轨道上,但是当使用重型的机器人机械手时,支架部分重量也需加大,工作人员无法轻易拆装并移动支架部分。
4、中国发明专利公开号cn 113691712 a公开了一种用于影视拍摄的运动装置,包括底座和轨道,轨道上安装齿条,底座能够通过齿轮齿条机构在轨道上移动,底座包括底板,底板下方设置滑轨,滑轨上安装可以沿滑轨滑动的驱动机构,驱动机构包括电机、减速机、齿轮403,通过电机驱动齿轮403与齿条配合从而在轨道上移动。压紧机构能够将上述的驱动机构和齿条压紧配合或相分离。上述技术方案可以实现在安装或者拆卸的过程中驱动机构的齿轮与齿条顺利的啮合与分离,使得拼装更高效,方便了用户进行转场安装。
5、但是上述方案中的压紧机构结构复杂,造价高昂,可靠性差。压紧机构需要同时拆开和锁紧两个缩放件才能将压紧机构放开和锁紧,操作复杂。
技术实现思路
1、本实用新型要解决的问题是提供一种摄像机轨道机器人轨道车,在将齿轮压向齿条时操作方便,驱动装置锁紧机构的结构简单可靠。
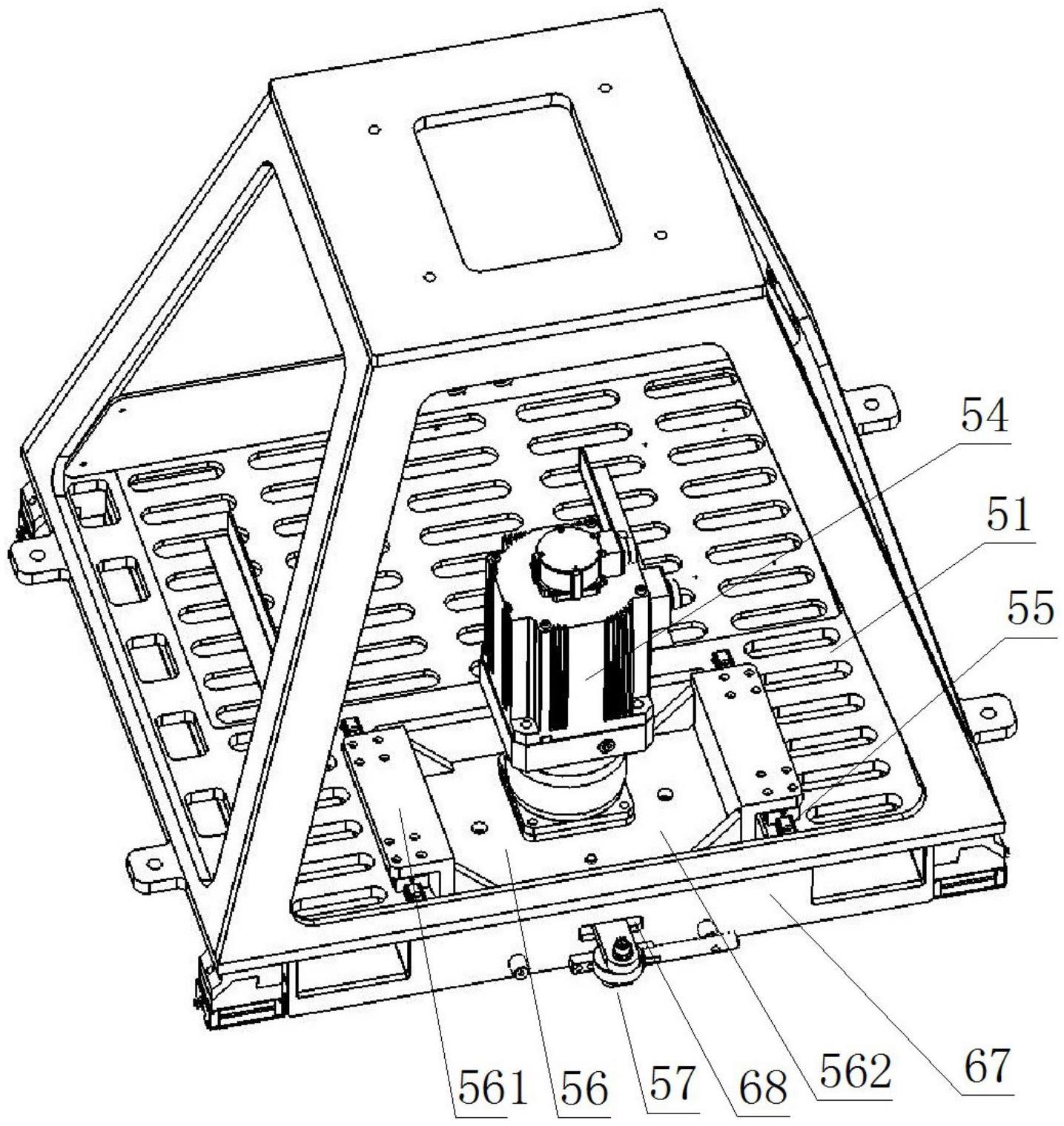
2、为解决上述技术问题,本实用新型的摄像机轨道机器人轨道车,包括移动座,移动座用于连接摄像机机械臂,并能在轨道上移动;所述移动座包括底板;所述底板上安装驱动装置,所述驱动装置为齿轮齿条机构,所述驱动装置包括与轨道上的齿条匹配的齿轮和驱动齿轮的电机,所述底板上设置滑轨,所述滑轨垂直于轨道延伸方向,所述滑轨上安装能够沿滑轨滑动的滑动板,使得滑动板能够在垂直于轨道的方向上移动;所述滑动板上安装电机和齿轮,所述底板上设置驱动装置锁紧机构,所述驱动装置锁紧机构一端连接所述滑动板,另一端安装在底板上,所述驱动装置锁紧机构能够将齿轮拉近和推离所述齿条,使得所述齿条啮合和分离;所述驱动装置锁紧机构包括连接在所述滑动板上的连接杆,所述连接杆的外端安装转轮,所述转轮包括设置在转轮的圆心的中心轴和连接轴,所述连接轴设置在所述转轮圆心以外,所述连接杆通过连接轴与转轮安装,所述中心轴安装在底板上,所述转轮上安装锁紧把手。
3、通过采用上述技术方案,驱动装置锁紧机构结构简单可靠,仅通过一步操作就可以很顺畅的将齿轮和电机在靠近齿条的锁定状态和离开齿条的脱离状态之间切换。当需要将齿轮贴近齿条与齿条啮合时,转动锁紧把手,使得转轮转动,连接轴从靠近侧板的位置转到了远离侧板的位置上,使得连接杆向外拉,带动滑动板向外移动,从而使得齿轮与齿条啮合。
4、优选的,所述转轮为圆形。圆形的转轮可以使得转轮旋转更为顺畅。
5、作为进一步的改进,所述底板侧面设置侧板,所述侧板上固定设置安装台,所述中心轴安装在安装台上,所述侧板上设有供所述连接轴通过的长条孔。
6、设置安装台可以方便驱动装置锁紧机构的安装。
7、作为进一步的改进,所述锁紧把手的端部设有第一连接装置,所述侧板上设有与所述第一连接装置匹配的第二连接装置。
8、设置锁紧把手的连接装置,可以在锁定或者脱离的状态下保持锁紧把手固定不动。
9、作为进一步的改进,所述第一连接装置设置在锁紧把手的两侧,所述侧板上安装台的两侧各设有与所述第一连接装置匹配的第二连接装置。
10、在两侧设置连接装置,当连接杆向外移动到最远位置时可以将锁紧把手连接在其中一侧;当连接杆向内移动到最大位置时,可以将锁紧把手连接在另一侧。可以在齿轮啮合和分离两种状态都可以锁定。
11、作为进一步的改进,所述连接杆与滑动板通过铰轴连接。
12、由于连接杆的外端安装在转轮上,转轮在转动时会改变连接杆的角度,将连接杆与滑动板铰接后,可以方便的改变连接杆角度。
13、作为进一步的改进,所述第二连接装置为固定设置在所述侧板上的柱体,所述第二连接装置的高度小于转轮圆心到所述侧板的距离。
14、这样的结构可以使得第一连接装置与第二连接装置连接后,将锁紧把手固定住,锁紧把手的外端向侧板的方向转过一些,使得转轮带动连接杆转动的角度超过180度,齿轮在与齿条啮合后,可以防止回弹。
15、作为进一步的改进,所述底板上设有方形的安装口,所述滑轨设置在安装口的两侧边,两条滑轨上安装滑动板,所述齿轮安装在所述底板的下方,所述电机安装在所述底板的上方。
16、作为进一步的改进,所述滑动板靠近所述垂直边的两端分别设有翘起部,两侧的翘起部之间为下沉部,所述翘起部的高度高于所述下沉部,所述翘起部的底部安装在所述滑轨上,所述电机和齿轮安装在下沉部上,所述齿轮低于所述底板。
17、采用这样的结构后,本实用新型的摄像机轨道机器人轨道车的驱动装置锁紧机构结构简单可靠,仅通过一步操作就可以很顺畅的将齿轮和电机在靠近齿条的锁定状态和离开齿条的脱离状态之间切换。当需要将齿轮贴近齿条与齿条啮合时,转动锁紧把手,使得转轮转动,连接轴从靠近侧板的位置转到了远离侧板的位置上,使得连接杆向外拉,带动滑动板向外移动,从而使得齿轮与齿条啮合。
18、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,从而可依照说明书的内容予以实施,并且为了让本申请的上述和其他目的、特征和优点能够更明显易懂,以下以本申请的较佳实施例并配合附图详细说明如后。
19、根据下文结合附图对本申请具体实施例的详细描述,本领域技术人员将会更加明了本申请的上述及其他目的、优点和特征。
技术特征:
1.一种摄像机轨道机器人轨道车,包括移动座,移动座用于连接摄像机机械臂,并能在轨道上移动;所述移动座包括底板;
2.按照权利要求1所述的摄像机轨道机器人轨道车,其特征在于:所述转轮为圆形。
3.按照权利要求2所述的摄像机轨道机器人轨道车,其特征在于:所述底板侧面设置侧板,所述侧板上固定设置安装台,所述中心轴安装在安装台上,所述侧板上设有供所述连接轴通过的长条孔。
4.按照权利要求3所述的摄像机轨道机器人轨道车,其特征在于:所述锁紧把手的端部设有第一连接装置,所述侧板上设有与所述第一连接装置匹配的第二连接装置。
5.按照权利要求4所述的摄像机轨道机器人轨道车,其特征在于:所述第一连接装置设置在锁紧把手的两侧,所述侧板上安装台的两侧各设有与所述第一连接装置匹配的第二连接装置。
6.按照权利要求4或5所述的摄像机轨道机器人轨道车,其特征在于:所述连接杆与滑动板通过铰轴连接。
7.按照权利要求4或5所述的摄像机轨道机器人轨道车,其特征在于:所述第二连接装置为固定设置在所述侧板上的柱体,所述第二连接装置的高度小于转轮圆心到所述侧板的距离。
8.按照权利要求7所述的摄像机轨道机器人轨道车,其特征在于:所述底板上设有方形的安装口,所述滑轨设置在安装口的两侧边,两条滑轨上安装滑动板,所述齿轮安装在所述底板的下方,所述电机安装在所述底板的上方。
9.按照权利要求8所述的摄像机轨道机器人轨道车,其特征在于:所述安装口包括两个垂直于轨道延伸方向的垂直边和两个平行于轨道延伸方向的平行边,所述滑动板靠近所述垂直边的两端分别设有翘起部,两侧的翘起部之间为下沉部,所述翘起部的高度高于所述下沉部,所述翘起部的底部安装在所述滑轨上,所述电机和齿轮安装在下沉部上,所述齿轮低于所述底板。
技术总结
本技术涉及一种摄像机轨道机器人轨道车,包括移动座,移动座用于连接摄像机机械臂,并能在轨道上移动;所述移动座包括底板;所述底板上安装驱动装置,所述驱动装置为齿轮齿条机构,所述驱动装置包括与轨道上的齿条匹配的齿轮和驱动齿轮的电机,所述底板上设置滑轨,所述滑轨垂直于轨道延伸方向,所述滑轨上安装能够沿滑轨滑动的滑动板,使得滑动板能够在垂直于轨道的方向上移动;所述滑动板上安装电机和齿轮,所述底板上设置驱动装置锁紧机构。驱动装置锁紧机构结构简单可靠,仅通过一步操作就可以很顺畅的将齿轮和电机在靠近齿条的锁定状态和离开齿条的脱离状态之间切换。
技术研发人员:吕浩源,易子奇,孟君韬
受保护的技术使用者:克苏鲁影视科技(青岛)有限公司
技术研发日:20221214
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!