一种机械自动化机器人手臂连接底座的制作方法
本技术涉及连接底座,更具体地涉及一种机械自动化机器人手臂连接底座。
背景技术:
1、在工业生产过程中,经常会用到机器人手臂来进行周转物料,其中机器人手臂需要固定安装在某一个指定位置,然后对其编程,使其安装设定的运行轨迹进行移动。
2、在对机器人手臂进行安装时,一般都会用到相应的连接底座,在安装时,先将连接底座固定安装在地面上,之后在将机器人手臂安装在连接底座上,目前在将机器人手臂安装在连接底座上时,大多都是将机器人手臂吊起,然后将机器人手臂的底座上的安装孔与连接底座上的安装孔对齐,然后在安装孔内安装上相应的固定螺栓,来完成固定。
3、这种安装方式下,由于吊装过程中会产生晃动,并且机器人手臂底座上以及连接底座上的安装孔较多,对齐起来非常繁琐,安装起来较为不便。
4、为此,本实用新型提出一种机械自动化机器人手臂连接底座。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供了一种机械自动化机器人手臂连接底座,以解决上述背景技术中存在的问题。
2、本实用新型提供如下技术方案:一种机械自动化机器人手臂连接底座,包括座体,座体的侧面固定安装有若干安装板,安装板的中间开设有若干通孔,所述座体为中空结构,座体的内部固定安装有竖直放置的承载柱,承载柱的表面转动套设有连接筒,连接筒的顶端固定安装有连接板,连接板的表面开设有若干安装孔,且连接板上的安装孔与机器人手臂底座的安装孔位置一一对应,安装孔的中间配设有固定螺栓,连接筒配设有驱动组件,通过驱动组件带动连接筒转动,并同时对连接筒进行限位。
3、进一步的,所述驱动组件包括蜗轮,蜗轮固定套设在连接筒的表面。
4、进一步的,所述座体的内部转动安装有蜗杆,且蜗杆与蜗轮啮合。
5、进一步的,所述座体的侧面转动设置有连接轴,蜗杆的转轴延伸至座体外部,且与连接轴固定连接。
6、进一步的,所述连接轴的截面为正方形,同时连接轴配设有摇把,且摇把可套设在连接轴表面。
7、进一步的,所述连接筒的底端与顶端均设置有限位环,且限位环固定安装在连接筒的表面。
8、进一步的,所述承载柱的顶端开设有锥形的沉孔,且沉孔的直径自下向上逐步放大,机器人手臂底座的下表面焊接有锥形的定位销,且定位销可插入沉孔内。
9、本实用新型的技术效果和优点:
10、1.本实用新型,在整个安装过程中,哪怕机器人手臂由于晃动而致使位置产生一定偏移,定位销底端也可插入沉孔内,使得使用者只需调节连接板上安装孔的位置进行对准即可,不在需要在吊装的时候对准,大大简化了安装过程中的对准作业,从而让安装过程更加简单。
11、2.本实用新型,由于不需在吊装过程中进行对准,这使得安装人员不在需要站在吊装物下方或是旁边,这可以有效避免吊装物掉落而砸伤安装人员的情况,有效消除了安全隐患。
技术特征:
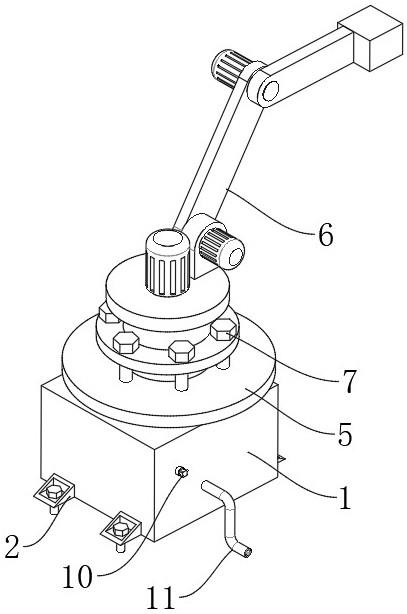
1.一种机械自动化机器人手臂连接底座,包括座体(1),座体(1)的侧面固定安装有若干安装板(2),安装板(2)的中间开设有若干通孔,其特征在于:所述座体(1)为中空结构,座体(1)的内部固定安装有竖直放置的承载柱(3),承载柱(3)的表面转动套设有连接筒(4),连接筒(4)的顶端固定安装有连接板(5),连接板(5)的表面开设有若干安装孔,且连接板(5)上的安装孔与机器人手臂(6)底座的安装孔位置一一对应,安装孔的中间配设有固定螺栓(7),连接筒(4)配设有驱动组件,通过驱动组件带动连接筒(4)转动,并同时对连接筒(4)进行限位。
2.根据权利要求1所述的一种机械自动化机器人手臂连接底座,其特征在于:所述驱动组件包括蜗轮(8),蜗轮(8)固定套设在连接筒(4)的表面。
3.根据权利要求2所述的一种机械自动化机器人手臂连接底座,其特征在于:所述座体(1)的内部转动安装有蜗杆(9),且蜗杆(9)与蜗轮(8)啮合。
4.根据权利要求3所述的一种机械自动化机器人手臂连接底座,其特征在于:所述座体(1)的侧面转动设置有连接轴(10),蜗杆(9)的转轴延伸至座体(1)外部,且与连接轴(10)固定连接。
5.根据权利要求4所述的一种机械自动化机器人手臂连接底座,其特征在于:所述连接轴(10)的截面为正方形,同时连接轴(10)配设有摇把(11),且摇把(11)可套设在连接轴(10)表面。
6.根据权利要求1-5任一项所述的一种机械自动化机器人手臂连接底座,其特征在于:所述连接筒(4)的底端与顶端均设置有限位环(12),且限位环(12)固定安装在连接筒(4)的表面。
7.根据权利要求6所述的一种机械自动化机器人手臂连接底座,其特征在于:所述承载柱(3)的顶端开设有锥形的沉孔(13),且沉孔(13)的直径自下向上逐步放大,机器人手臂(6)底座的下表面焊接有锥形的定位销(14),且定位销(14)可插入沉孔(13)内。
技术总结
本技术涉及连接底座技术领域,且公开了一种机械自动化机器人手臂连接底座,包括座体,座体的侧面固定安装有若干安装板,安装板的中间开设有若干通孔,所述座体为中空结构,座体的内部固定安装有竖直放置的承载柱,承载柱的表面转动套设有连接筒,连接筒的顶端固定安装有连接板,连接板的表面开设有若干安装孔,且连接板上的安装孔与机器人手臂底座的安装孔位置一一对应,安装孔的中间配设有固定螺栓,连接筒配设有驱动组件,通过驱动组件带动连接筒转动,并同时对连接筒进行限位。本技术,在整个安装过程中,不在需要在吊装的时候对准,大大简化了安装过程中的对准作业,从而让安装过程更加简单。
技术研发人员:陈鹏飞,何小叶
受保护的技术使用者:荷顿汽车工程(江苏)有限公司
技术研发日:20221216
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!