放料机械手臂的制作方法
本技术涉及机械手臂,具体为放料机械手臂。
背景技术:
1、机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
2、然而,现有的放料机械手臂在使用的过程中存在以下的问题:
3、(1)现有移动方式需要人工和机械配合,操作时间长,由于机械手臂体积较大,则移动较为繁琐,无法适用于市场需求,
4、(2)由于在取工件时,工件长度不同,需要不同尺寸的夹紧设备进行夹紧,使得操作人员需要大量时间对夹紧设备不同尺寸进行替换,则工作效率不高。
技术实现思路
1、本实用新型的目的在于提供放料机械手臂,以解决上述背景技术中提出的与相关问题。
2、为实现上述目的,本实用新型提供如下技术方案:放料机械手臂,包括底座、环形轨道和第一电机,所述底座的顶端安装有环形轨道,所述环形轨道的内部安装有滑轨,所述环形轨道内部的底端设置有环形齿条,所述滑轨的内部设置有第一电机,所述第一电机底端设置有用于传动所述第一电机位置的传动机构,所述第一电机的顶端设置有手臂主撑架,且手臂主撑架的顶端焊接有安装架,所述安装架的内壁之间安装有固定轴,且固定轴的外壁设置有第二电机,所述第二电机的输出端设置有手臂副撑架,且手臂副撑架的底端安装有第三电机,所述第三电机输出端安装有转动架,且转动架底端设置有用于放料的吸入机构,所述安装架的底端设置有气缸,且气缸的输出端与第二电机外部相互铰接。
3、进一步的,所述第一电机内壁的两侧安装有滑块,且滑块外壁与滑轨的内部相匹配
4、进一步的,所述传动机构包括外壳和第四电机,所述第一电机的底端两侧安装有固定架,且固定架的一侧设置有外壳。
5、进一步的,所述外壳的内部设置有第四电机,且第四电机的输出端设置有转轴。
6、进一步的,所述转轴的外壁设置有齿轮,且齿轮外壁与环形齿条的外壁相互啮合。
7、进一步的,所述吸入机构包括空气吸盘器和真空孔,所述转动架的底端设置有空气吸盘器,所述空气吸盘器的底端开设有多个真空孔。
8、进一步的,所述空气吸盘器的外壁设置有调节开关。
9、与现有技术相比,本实用新型提供了放料机械手臂,具备以下有益效果:
10、1、本实用新型通过启动第四电机带动转轴旋转,从而转轴带动齿轮与环形齿条外壁相啮合,进而齿轮的旋转力下在第一电机在滑轨内滑动,使得便于对不同位置的工件进行放料。
11、2、本实用新型通过启动第四电机带动转轴旋转,从而转轴带动齿轮与环形齿条外壁相啮合,进而齿轮的旋转力下在第一电机在滑轨内滑动至合适位置。
技术特征:
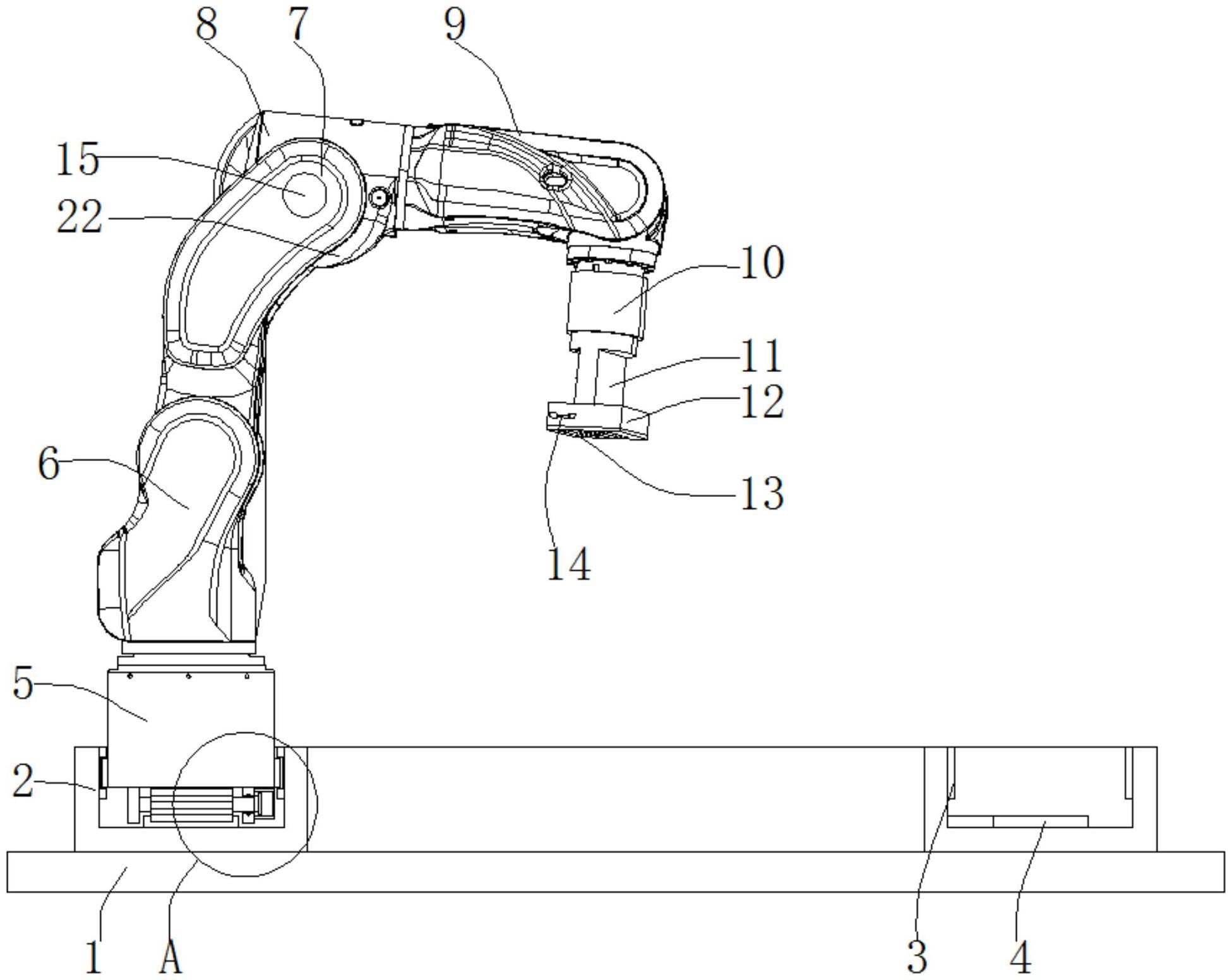
1.放料机械手臂,包括底座(1)、环形轨道(2)和第一电机(5),其特征在于:所述底座(1)的顶端安装有环形轨道(2),所述环形轨道(2)的内部安装有滑轨(3),所述环形轨道(2)内部的底端设置有环形齿条(4),所述滑轨(3)的内部设置有第一电机(5),所述第一电机(5)底端设置有用于传动所述第一电机(5)位置的传动机构,所述第一电机(5)的顶端设置有手臂主撑架(6),且手臂主撑架(6)的顶端焊接有安装架(7),所述安装架(7)的内壁之间安装有固定轴(15),且固定轴(15)的外壁设置有第二电机(8),所述第二电机(8)的输出端设置有手臂副撑架(9),且手臂副撑架(9)的底端安装有第三电机(10),所述第三电机(10)输出端安装有转动架(11),且转动架(11)底端设置有用于放料的吸入机构,所述安装架(7)的底端设置有气缸(22),且气缸(22)的输出端与第二电机(8)外部相互铰接。
2.根据权利要求1所述的放料机械手臂,其特征在于:所述第一电机(5)内壁的两侧安装有滑块(16),且滑块(16)外壁与滑轨(3)的内部相匹配。
3.根据权利要求1所述的放料机械手臂,其特征在于:所述传动机构包括外壳(18)和第四电机(19),所述第一电机(5)的底端两侧安装有固定架(17),且固定架(17)的一侧设置有外壳(18)。
4.根据权利要求3所述的放料机械手臂,其特征在于:所述外壳(18)的内部设置有第四电机(19),且第四电机(19)的输出端设置有转轴(20)。
5.根据权利要求4所述的放料机械手臂,其特征在于:所述转轴(20)的外壁设置有齿轮(21),且齿轮(21)外壁与环形齿条(4)的外壁相互啮合。
6.根据权利要求1所述的放料机械手臂,其特征在于:所述吸入机构包括空气吸盘器(12)和真空孔(13),所述转动架(11)的底端设置有空气吸盘器(12),所述空气吸盘器(12)的底端开设有多个真空孔(13)。
7.根据权利要求6所述的放料机械手臂,其特征在于:所述空气吸盘器(12)的外壁设置有调节开关(14)。
技术总结
本技术公开了放料机械手臂,包括底座、环形轨道和第一电机,所述底座的顶端安装有环形轨道,所述环形轨道的内部安装有滑轨,所述环形轨道内部的底端设置有环形齿条,所述滑轨的内部设置有第一电机,所述第一电机底端设置有用于传动所述第一电机位置的传动机构,所述第一电机的顶端设置有手臂主撑架,且手臂主撑架的顶端焊接有安装架,所述安装架的内壁之间安装有固定轴,且固定轴的外壁设置有第二电机,所述第二电机的输出端设置有手臂副撑架,且手臂副撑架的底端安装有第三电机,该装置通过转轴带动齿轮与环形齿条外壁相啮合,进而齿轮的旋转力下在第一电机在滑轨内滑动,使得便于对不同位置的工件放料。
技术研发人员:王纪群,赵新峰,宋晓婧
受保护的技术使用者:青岛金一模具有限公司
技术研发日:20221216
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!