一种安防机器人的制作方法
本技术涉及人脸识别安防机器人,尤其涉及一种安防机器人。
背景技术:
1、人脸识别安防机器人主要是用于对人脸信息进行采集识别的设备,通常放置于大门入口等区域,若要进入则需通过人脸扫描进行验证,并且人脸识别安防机器人能够进行移动,从而能够准确的移动到每个人面前进行人脸识别,然而现有用于人脸识别的安防机器人,不具有自动根据不同身高的靠近者而调节摄像头的高度和倾斜角度以方便人脸识别的功能,因而导致无法识别身高较矮的人群,同时存在需要身高较高的人们弯腰才能识别的问题。
2、现有专利(公开号cn113843808a)公开了一种安防机器人,包括显示屏、机体、控制按钮、摄像头,控制按钮与机体的前端相连接,摄像头嵌入于显示屏的内部靠上端位置,机体的顶部与显示屏的顶部相连接,通过移动轮能够通过自身的重量与增重块相配合,能够使下滑杆沿着套框向下滑动,从而使移动轮的表面能够始终与地面相贴合,从而使移动轮能够持续的在地面上进行前进,而小石块则会进入外壳的内部,通过石块对伸缩块产生的挤压,能够使伸缩块沿着环体向内滑动,从而使石块能够卡入环体的内部,故而使石块能够被环体带至移动轮后端,并且能够保证移动轮的平稳滚动;上述方案实施过程中,不具有自动根据不同身高的靠近者而调节摄像头的高度和倾斜角度以方便人脸识别的功能,因而导致无法识别身高较矮的人群,同时存在需要身高较高的人们弯腰才能识别的问题,故在使用过程中的智能程度较低而存在较大的局限性。
3、为此,有必要提供一种安防机器人解决上述技术问题。
技术实现思路
1、本实用新型提供一种安防机器人,解决了现有用于人脸识别的安防机器人,不具有自动根据不同身高的靠近者而调节摄像头的高度和倾斜角度以方便人脸识别的功能,因而导致无法识别身高较矮的人群,同时存在需要身高较高的人们弯腰才能识别的技术问题。
2、为解决上述技术问题,本实用新型提供的一种安防机器人,包括壳体和轮式机器人底盘,所述壳体安装在轮式机器人底盘的顶部,壳体的内部安装有电动伸缩杆,壳体的内底壁和外壁分别安装有智能网关和人体传感器,所述电动伸缩杆的伸缩端安装有盒体,所述盒体的前侧安装有触控显示屏和人脸识别摄像头,盒体的内壁和后侧分别安装有单片机与驱动盒,所述驱动盒的内壁转动连接有转轴,所述转轴延伸至驱动盒外部的一端与电动伸缩杆的伸缩端连接,转轴的外壁安装有齿轮,所述驱动盒的内部设置有微型电动推杆,所述微型电动推杆的伸缩端与驱动盒的内底壁连接,微型电动推杆的一侧安装有与齿轮啮合连接的齿条,所述轮式机器人底盘、电动伸缩杆、智能网关、人体传感器、触控显示屏、人脸识别摄像头和微型电动推杆均与单片机电性连接。
3、优选的,所述盒体的一侧设置有散热组件,所述散热组件包括安装在盒体一侧的金属框,所述金属框的内壁磁性相吸有永磁框,所述永磁框的内壁安装有滤网。
4、优选的,所述壳体的材质为碳纤维。
5、优选的,所述人体传感器的数量为三个。
6、优选的,所述壳体的外壁安装有与单片机电性连接的扬声器。
7、优选的,所述驱动盒的内顶壁安装有与齿条插接的导向杆。
8、优选的,所述壳体的内底壁安装有与单片机电性连接的蓄电池。
9、优选的,所述盒体的一侧一体成型有数据接口。
10、与相关技术相比较,本实用新型提供的一种安防机器人具有如下有益效果:
11、1、本实用新型中,三个不同角度设置的人体传感器可检测不同方向的人靠近壳体,并传送信号至单片机以控制电动伸缩杆的伸缩端伸缩而调节盒体的高度,同时控制微型电动推杆的伸缩端伸缩而通过齿条带动齿轮上的转轴转动,使驱动盒在电动伸缩杆上转动而调节盒体的倾斜角度,进而方便通过人脸识别摄像头对不同身高的靠近者自动人脸识别,单片机内预设有可通过的人员数据,并通过智能网关实时更新,或直接联网识别,以确保安全性,通过设置轮式机器人底盘,便于全方向移动以及原地转动壳体。
12、2、本实用新型中,通过设置滤网,便于盒体的内外空气交换,从而便于对单片机散热,同时能够直接过滤空气中的灰尘,从而保障了盒体的内部环境,避免灰尘吸附在单片机的电子元件上而导致散热能力下降的问题,同时避免灰尘中含有水分而导致单片机的电子元件变得潮湿甚至发生腐蚀并使相邻印制线间的绝缘电阻下降后影响电路正常工作的问题,进而避免引起短路故障后烧毁单片机的问题,通过设置金属框并利用永磁框的磁性,便于安装和拆卸滤网,因而便于清理滤网上的灰尘以确保后续防尘效果。
技术特征:
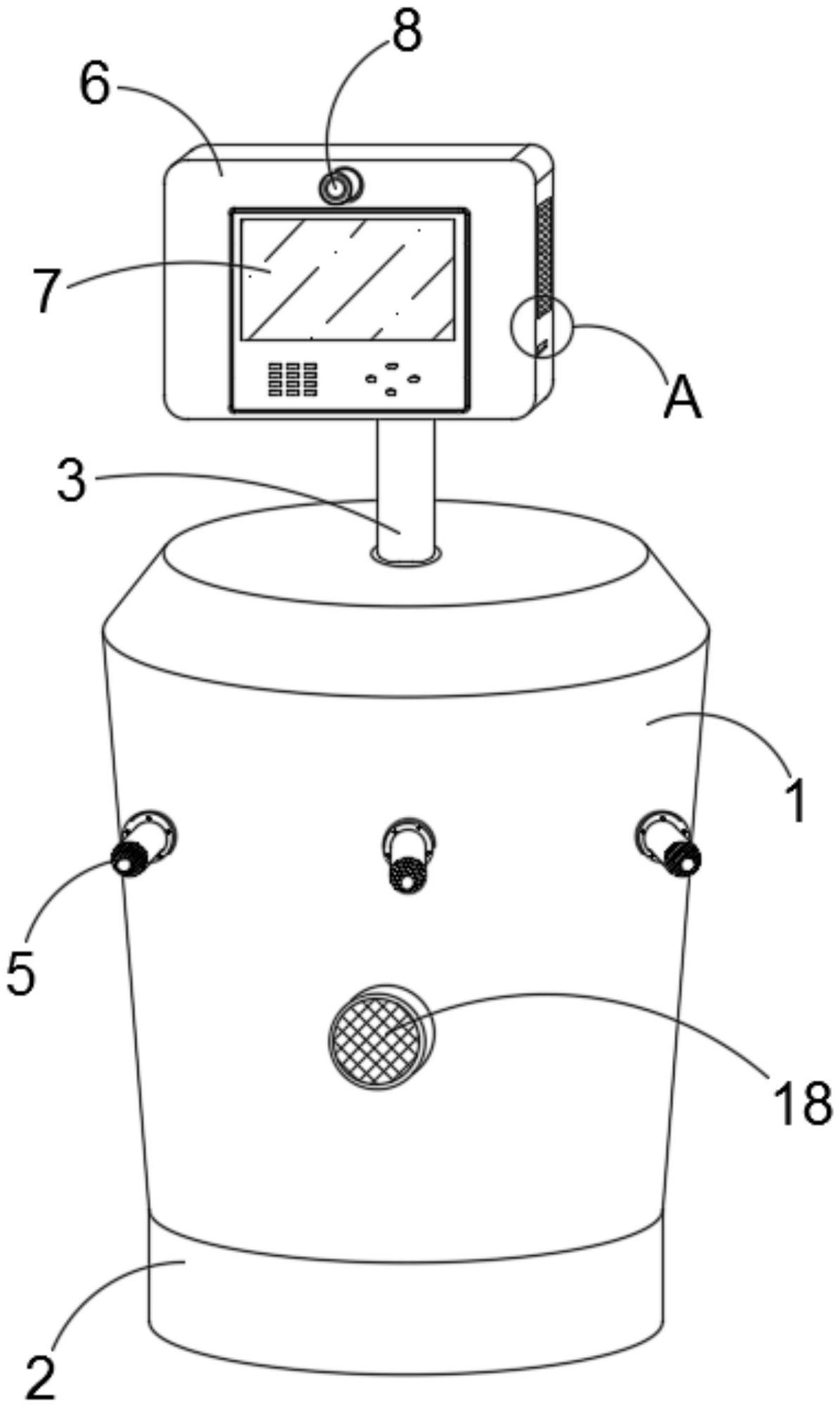
1.一种安防机器人,包括壳体(1)和轮式机器人底盘(2),其特征在于,所述壳体(1)安装在轮式机器人底盘(2)的顶部,壳体(1)的内部安装有电动伸缩杆(3),壳体(1)的内底壁和外壁分别安装有智能网关(4)和人体传感器(5),所述电动伸缩杆(3)的伸缩端安装有盒体(6),所述盒体(6)的前侧安装有触控显示屏(7)和人脸识别摄像头(8),盒体(6)的内壁和后侧分别安装有单片机(9)与驱动盒(10),所述驱动盒(10)的内壁转动连接有转轴(11),所述转轴(11)延伸至驱动盒(10)外部的一端与电动伸缩杆(3)的伸缩端连接,转轴(11)的外壁安装有齿轮(12),所述驱动盒(10)的内部设置有微型电动推杆(13),所述微型电动推杆(13)的伸缩端与驱动盒(10)的内底壁连接,微型电动推杆(13)的一侧安装有与齿轮(12)啮合连接的齿条(14),所述轮式机器人底盘(2)、电动伸缩杆(3)、智能网关(4)、人体传感器(5)、触控显示屏(7)、人脸识别摄像头(8)和微型电动推杆(13)均与单片机(9)电性连接。
2.根据权利要求1所述的一种安防机器人,其特征在于,所述盒体(6)的一侧设置有散热组件,所述散热组件包括安装在盒体(6)一侧的金属框(15),所述金属框(15)的内壁磁性相吸有永磁框(16),所述永磁框(16)的内壁安装有滤网(17)。
3.根据权利要求1所述的一种安防机器人,其特征在于,所述壳体(1)的材质为碳纤维。
4.根据权利要求1所述的一种安防机器人,其特征在于,所述人体传感器(5)的数量为三个。
5.根据权利要求1所述的一种安防机器人,其特征在于,所述壳体(1)的外壁安装有与单片机(9)电性连接的扬声器(18)。
6.根据权利要求1所述的一种安防机器人,其特征在于,所述驱动盒(10)的内顶壁安装有与齿条(14)插接的导向杆(19)。
7.根据权利要求1所述的一种安防机器人,其特征在于,所述壳体(1)的内底壁安装有与单片机(9)电性连接的蓄电池(20)。
8.根据权利要求1所述的一种安防机器人,其特征在于,所述盒体(6)的一侧一体成型有数据接口(21)。
技术总结
本技术公开了一种安防机器人,涉及人脸识别安防机器人技术领域,包括壳体和轮式机器人底盘,所述壳体安装在轮式机器人底盘的顶部,壳体的内部安装有电动伸缩杆,本技术中,三个不同角度设置的人体传感器可检测不同方向的人靠近壳体,并传送信号至单片机以控制电动伸缩杆的伸缩端伸缩而调节盒体的高度,同时控制微型电动推杆的伸缩端伸缩而通过齿条带动齿轮上的转轴转动,使驱动盒在电动伸缩杆上转动而调节盒体的倾斜角度,进而方便通过人脸识别摄像头对不同身高的靠近者自动人脸识别,单片机内预设有可通过的人员数据,并通过智能网关实时更新,或直接联网识别,以确保安全性。
技术研发人员:蒋金雨,刘果,但承家
受保护的技术使用者:蒋金雨
技术研发日:20221216
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!