一种机器人用精准移动滑轨装置的制作方法
本技术涉及机器人移动滑轨,具体为一种机器人用精准移动滑轨装置。
背景技术:
1、挂轨巡检机器人可以特殊环境下执行特巡和定制性巡检任务的机器人,可实现自主定位与导航,搭载特定摄像机,如全景相机或双光云台相机及多种环境监测模块传感器,可实时拍摄及感应周边环境,实现远程在线监测及数据分析,能够替代人工完成例行巡查、故障诊断、预警报警灯任务,帮助企业有效提升运维的内容和频率,突破传统人工巡检的限制,实现运维智能化。
2、但是,现有机器人移动滑轨在与机器人移动的时候,多数依靠机器人自身的移动机构驱动移动,连接处容易滑动出现位置偏移,导致位置移动不精准;因此,不满足现有的需求,对此我们提出了一种机器人用精准移动滑轨装置。
技术实现思路
1、本实用新型的目的在于提供一种机器人用精准移动滑轨装置,以解决上述背景技术中提出的现有机器人移动滑轨在与机器人移动的时候,多数依靠机器人自身的移动机构驱动移动,连接处容易滑动出现位置偏移,导致位置移动不精准的问题。
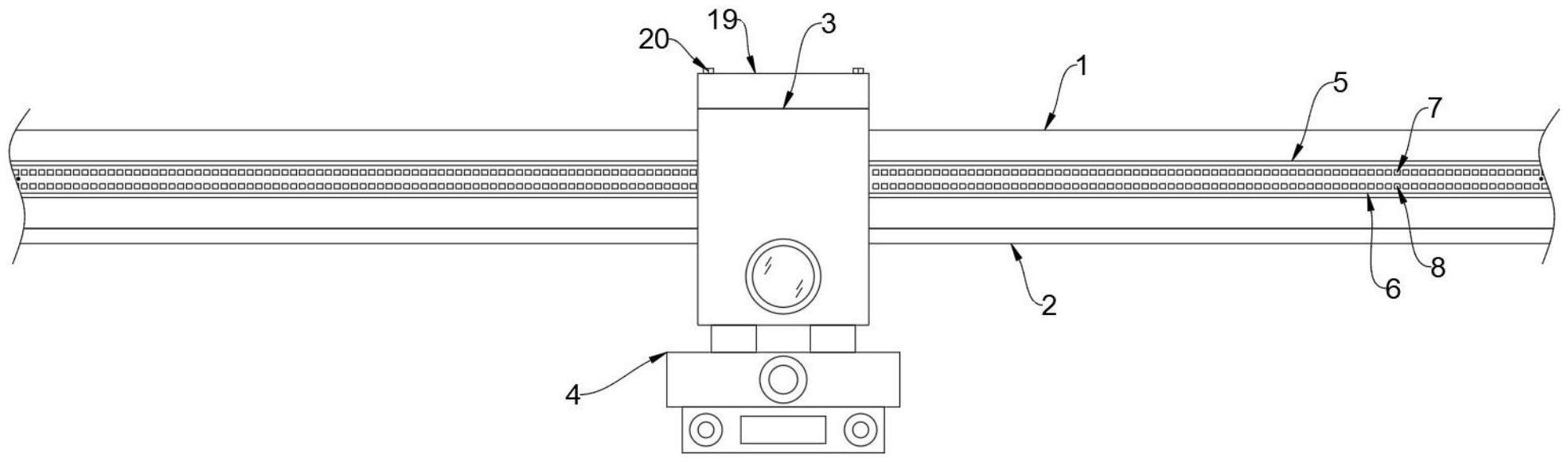
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人用精准移动滑轨装置,包括:滑轨轨道,所述滑轨轨道的下端两端均设置有限位移动边,且限位移动边与滑轨轨道为一体结构,所述滑轨轨道的外部设置有机器人驱动机构,所述机器人驱动机构的下端设置有机器人主体;
3、还包括:
4、精准板,其设置在所述滑轨轨道的两侧,所述精准板的一侧表面设置有第一精准槽,所述第一精准槽的下方设置有第二精准槽,且第一精准槽和第二精准槽均贯穿精准板;
5、第一限位齿轮,其设置在所述机器人驱动机构的内部,所述第一限位齿轮的下方设置有第二限位齿轮。
6、优选的,所述第一限位齿轮和第二限位齿轮的中心处贯穿设置有转动柱,所述转动柱的两端均设置有滚珠轴承,且转动柱通过滚珠轴承与机器人驱动机构转动连接。
7、优选的,所述第一限位齿轮和第二限位齿轮与机器人驱动机构之间设置有齿轮转动槽,且齿轮转动槽与与机器人驱动机构为一体结构,所述齿轮转动槽的一侧设置有转动开口。
8、优选的,所述滑轨轨道的两侧表面均设置有安装凹槽,且安装凹槽与滑轨轨道为一体结构,所述精准板位于安装凹槽内部。
9、优选的,所述精准板的两端均设置有单头紧固件,且精准板通过单头紧固件与滑轨轨道螺纹连接,所述单头紧固件与精准板之间设置有具有紧固件槽的紧固件凹陷槽,且紧固件凹陷槽与精准板为一体结构。
10、优选的,所述机器人驱动机构的中心处设置有轨道连接槽,所述轨道连接槽的下端设置有移动边连接槽。
11、优选的,所述机器人驱动机构的上端设置有防掉盖,所述防掉盖通过螺纹紧固件与机器人驱动机构固定连接。
12、与现有技术相比,本实用新型的有益效果是:
13、1、本实用新型通过在机器人驱动机构内部设置第一限位齿轮和第二限位齿轮,第一限位齿轮和第二限位齿轮通过转动柱和滚珠轴承与机器人驱动机构转动,并且精准板安装在安装凹槽内部,第一限位齿轮和第二限位齿轮的轮齿分别沿着第一精准槽和第二精准槽移动,从而对机器人驱动机构起到齿轮限位效果,这样就不会因为机器人驱动机构与滑轨轨道接触面滑动偏移,提高机器人移动的精准性能。
14、2、通过在滑轨轨道两侧表面均设置安装凹槽,精准板位于安装凹槽内部,精准板通过单头紧固件与滑轨轨道螺纹连接,便于拆卸更换,由于安装凹槽与滑轨轨道表面具有空隙,这样精准板就不会外突,第一限位齿轮和第二限位齿轮的轮齿就可以位于安装凹槽内部,降低机器人驱动机构与滑轨轨道之间的空隙,不易晃动,提高稳定性。
技术特征:
1.一种机器人用精准移动滑轨装置,包括滑轨轨道(1),所述滑轨轨道(1)的下端两端均设置有限位移动边(2),且限位移动边(2)与滑轨轨道(1)为一体结构,所述滑轨轨道(1)的外部设置有机器人驱动机构(3),所述机器人驱动机构(3)的下端设置有机器人主体(4);
2.根据权利要求1所述的一种机器人用精准移动滑轨装置,其特征在于:所述第一限位齿轮(11)和第二限位齿轮(12)的中心处贯穿设置有转动柱(15),所述转动柱(15)的两端均设置有滚珠轴承(16),且转动柱(15)通过滚珠轴承(16)与机器人驱动机构(3)转动连接。
3.根据权利要求1所述的一种机器人用精准移动滑轨装置,其特征在于:所述第一限位齿轮(11)和第二限位齿轮(12)与机器人驱动机构(3)之间设置有齿轮转动槽(13),且齿轮转动槽(13)与机器人驱动机构(3)为一体结构,所述齿轮转动槽(13)的一侧设置有转动开口(14)。
4.根据权利要求1所述的一种机器人用精准移动滑轨装置,其特征在于:所述滑轨轨道(1)的两侧表面均设置有安装凹槽(5),且安装凹槽(5)与滑轨轨道(1)为一体结构,所述精准板(6)位于安装凹槽(5)内部。
5.根据权利要求1所述的一种机器人用精准移动滑轨装置,其特征在于:所述精准板(6)的两端均设置有单头紧固件(17),且精准板(6)通过单头紧固件(17)与滑轨轨道(1)螺纹连接,所述单头紧固件(17)与精准板(6)之间设置有具有紧固件槽的紧固件凹陷槽(18),且紧固件凹陷槽(18)与精准板(6)为一体结构。
6.根据权利要求1所述的一种机器人用精准移动滑轨装置,其特征在于:所述机器人驱动机构(3)的中心处设置有轨道连接槽(9),所述轨道连接槽(9)的下端设置有移动边连接槽(10)。
7.根据权利要求1所述的一种机器人用精准移动滑轨装置,其特征在于:所述机器人驱动机构(3)的上端设置有防掉盖(19),所述防掉盖(19)通过螺纹紧固件(20)与机器人驱动机构(3)固定连接。
技术总结
本技术公开了一种机器人用精准移动滑轨装置,涉及机器人移动滑轨技术领域,为解决现有机器人移动滑轨在与机器人移动的时候,多数依靠机器人自身的移动机构驱动移动,连接处容易滑动出现位置偏移,导致位置移动不精准的问题。所述滑轨轨道的下端两端均设置有限位移动边,且限位移动边与滑轨轨道为一体结构,所述滑轨轨道的外部设置有机器人驱动机构,所述机器人驱动机构的下端设置有机器人主体;还包括:精准板,其设置在所述滑轨轨道的两侧,所述精准板的一侧表面设置有第一精准槽,所述第一精准槽的下方设置有第二精准槽;第一限位齿轮,其设置在所述机器人驱动机构的内部,所述第一限位齿轮的下方设置有第二限位齿轮。
技术研发人员:梁春磊
受保护的技术使用者:南京昂众智能科技有限公司
技术研发日:20221219
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!