一种真空吸附边皮抓取机构的制作方法
本技术涉及硅棒加工,尤其涉及一种真空吸附边皮抓取机构。
背景技术:
1、硅棒加工过程中,需要经开方工序沿硅棒的轴向进行开方切割,以将圆柱状的硅棒切割为长方体,开方后产生的废料称之为边皮。开方完成后,边皮仍贴附于硅棒的周向侧壁,需要通过边皮抓取机构抓取边皮以将边皮脱离于硅棒并运送至边皮输送工位。
2、现有技术中的边皮抓取机构普遍设置为:两个能够开合的机械手,每个机械手包括两个上下设置的机械夹爪以及和机械夹爪连接的驱动机构,驱动机构主要包括电机、丝杠和滑轨,驱动机构用于驱动两个上下设置的机械夹爪的张开和闭合。使用时,两个机械手张开并下移至对应于边皮,驱动机构驱动两个机械夹爪张开,两个机械夹爪张开并对应于边皮的上端和下端,驱动机构驱动两个机械夹爪闭合,两个机械夹爪闭合并夹持于边皮的上端和下端。随后,两个机械手张开以带动边皮脱离硅棒,以使边皮能够移动至边皮输送工位。
3、然而,硅棒的加工环境恶劣,由机械夹爪直接接触边皮,易导致边皮上的硅泥等杂质粘附于驱动机构上,驱动机构中的丝杠和滑轨长时间使用后易损坏,使用寿命较低。同时,现有技术中的边皮抓取机构还需要设置用于驱动两个上下设置的机械夹爪的张开和闭合的驱动机构,导致边皮抓取机构的制造成本高,后期维护保养麻烦,结构复杂,占用空间大。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本实用新型提供一种真空吸附边皮抓取机构,其解决了现有技术中的边皮抓取机构由机械夹爪直接接触边皮,易导致边皮上的硅泥等杂质粘附于驱动机构上,驱动机构中的丝杠和滑轨长时间使用后易损坏,使用寿命较低的技术问题,以及边皮抓取机构的制造成本高,后期维护保养麻烦,结构复杂,占用空间大的技术问题。
3、(二)技术方案
4、为了达到上述目的,本实用新型采用的主要技术方案包括:
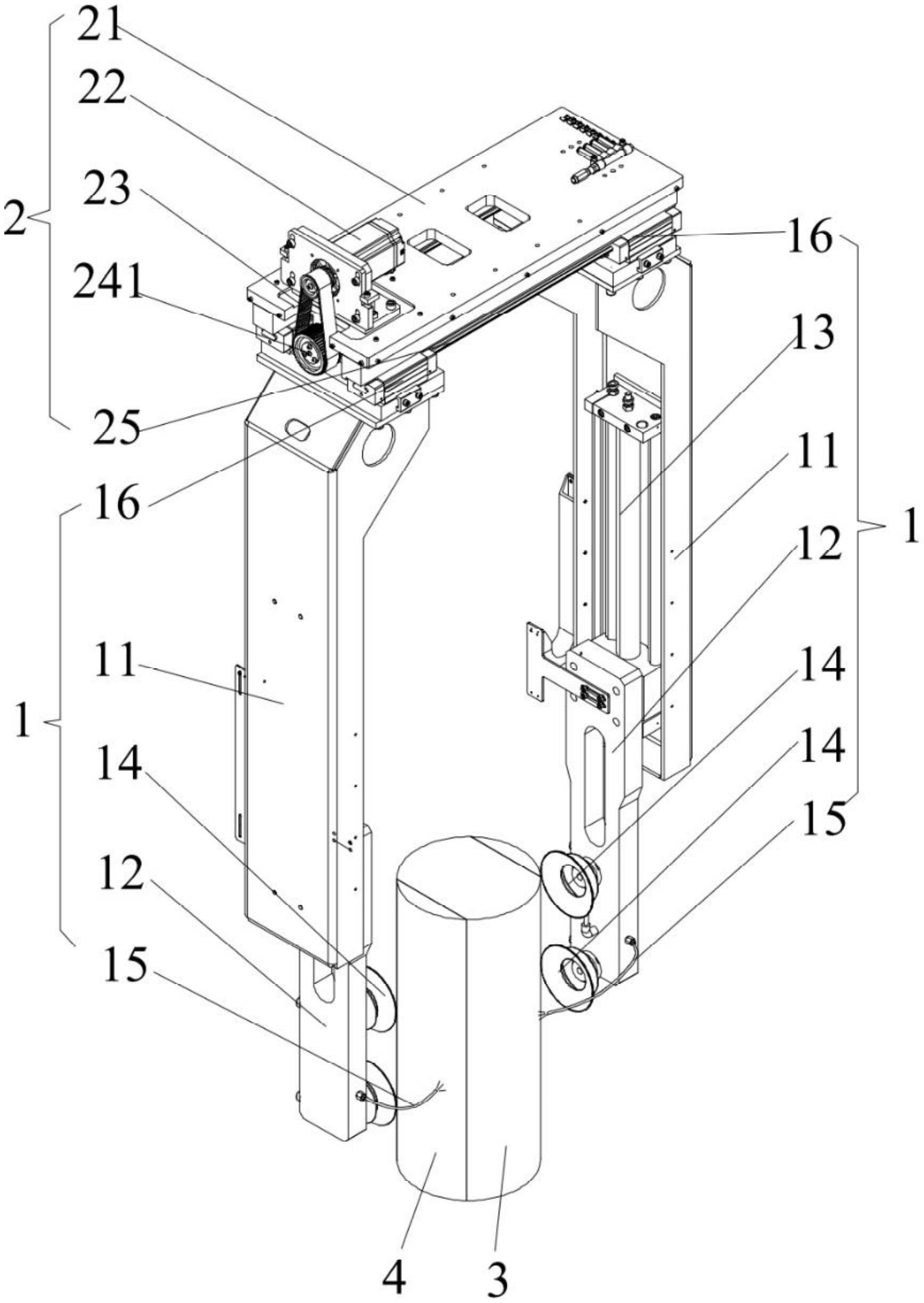
5、本实用新型实施例提供一种真空吸附边皮抓取装置,包括开合机构和两个真空机械手;
6、所述开合机构和两个相对设置的所述真空机械手连接,用于驱动两个所述真空机械手沿水平方向张开或闭合;
7、每个所述真空机械手均包括机械臂、伸缩臂和升降机构;
8、所述升降机构连接所述机械臂和所述伸缩臂,所述升降机构用于驱动所述伸缩臂沿竖直方向移动;
9、两个所述伸缩臂的相对侧壁均设置至少一个真空吸盘,所述真空吸盘能够与所述边皮之间形成负压环境以吸附于所述边皮。
10、根据本实用新型,两个所述伸缩臂的相对侧壁还均设置吹气机构,所述吹气机构能够向所述边皮和硅棒的接合处吹送气体。
11、根据本实用新型,所述吹气机构包括吹气泵和吹气管;
12、所述吹气泵固连于所述伸缩臂,所述吹气泵和所述吹气管连通,所述吹气管固连于所述伸缩臂。
13、根据本实用新型,每个所述真空机械手还包括真空机构,所述真空机构固连于所述机械臂,所述真空机构和所述真空吸盘连通;
14、所述真空吸盘贴合于所述边皮时,所述真空机构能够吸取所述真空吸盘与所述边皮之间的空气。
15、根据本实用新型,所述真空吸盘为截头圆锥体。
16、根据本实用新型,两个所述伸缩臂的相对侧壁均设置两个上下间隔设置的所述真空吸盘。
17、根据本实用新型,所述升降机构为气缸,所述气缸的主体固连于所述机械臂,所述液压气缸的伸缩端固连于所述伸缩臂。
18、根据本实用新型,所述机械臂上固连机械臂螺母;
19、所述开合机构包括支架、电机、同步带和丝杠组件;
20、所述电机固连于所述支架;
21、所述丝杠组件转动连接于所述支架上,所述丝杠组件位于所述电机的下方且水平设置;
22、所述同步带套设于所述电机的输出端和所述丝杠组件上,且所述同步带分别和所述电机的输出端以及所述丝杠啮合传动;
23、所述机械臂螺母螺纹连接于所述丝杠的外周。
24、根据本实用新型,所述机械臂上还固连滑块;
25、所述开合机构还包括水平滑轨;
26、所述水平滑轨固连所述支架;
27、所述滑块滑动连接于所述水平滑轨上。
28、(三)有益效果
29、本实用新型的有益效果是:本实用新型的本真空吸附边皮抓取装置通过真空吸盘吸附于边皮,由于真空吸盘采用负压吸附的原理吸附于边皮上,即使粘附硅泥等杂质也不影响真空吸盘的使用,因此,真空吸盘的使用寿命较长,能够适应恶劣的工况环境。同时,通过真空吸盘吸附于边皮的周向侧壁,也能避免边皮上的硅泥等杂质粘附于真空机械手上,影响真空机械手的正常使用,也延长真空吸附边皮抓取装置的使用寿命。同时,真空吸盘的成本较低,能够降低整个真空吸附边皮抓取装置的成本,还能取消设置用于驱动机械手中的两个机械夹爪开合的驱动机构,能够简化结构、缩小体积,便于后期维护保养。
技术特征:
1.一种真空吸附边皮抓取机构,其特征在于,包括开合机构(2)和两个真空机械手(1);
2.如权利要求1所述的真空吸附边皮抓取机构,其特征在于,两个所述伸缩臂(12)的相对侧壁还均设置吹气机构,所述吹气机构能够向所述边皮(4)和硅棒(3)的接合处吹送气体。
3.如权利要求2所述的真空吸附边皮抓取机构,其特征在于,所述吹气机构包括吹气泵和吹气管(15);
4.如权利要求1所述的真空吸附边皮抓取机构,其特征在于,每个所述真空机械手(1)还包括真空机构,所述真空机构固连于所述机械臂(11),所述真空机构和所述真空吸盘(14)连通;
5.如权利要求1所述的真空吸附边皮抓取机构,其特征在于,所述真空吸盘(14)为截头圆锥体。
6.如权利要求1所述的真空吸附边皮抓取机构,其特征在于,两个所述伸缩臂(12)的相对侧壁均设置两个上下间隔设置的所述真空吸盘(14)。
7.如权利要求1所述的真空吸附边皮抓取机构,其特征在于,所述升降机构(13)为气缸,所述气缸的主体固连于所述机械臂(11),所述气缸的伸缩端固连于所述伸缩臂(12)。
8.如权利要求1所述的真空吸附边皮抓取机构,其特征在于,所述机械臂(11)上固连机械臂螺母(17);
9.如权利要求8所述的真空吸附边皮抓取机构,其特征在于,所述机械臂(11)上还固连滑块(16);
技术总结
本技术涉及一种真空吸附边皮抓取机构,包括开合机构和两个真空机械手。开合机构和两个相对设置的真空机械手连接,用于驱动两个真空机械手沿水平方向张开或闭合。每个真空机械手均包括机械臂、伸缩臂和升降机构。升降机构连接机械臂和伸缩臂,升降机构用于驱动伸缩臂沿竖直方向移动。两个伸缩臂的相对侧壁均设置至少一个真空吸盘,真空吸盘能够与边皮之间形成负压环境以吸附于边皮。其有益效果是,通过真空吸盘吸附于边皮,由于真空吸盘采用负压吸附的原理吸附于边皮上,即使粘附硅泥等杂质也不影响真空吸盘的使用。同时,通过真空吸盘吸附于边皮的周向侧壁,也能避免边皮上的硅泥等杂质粘附于真空机械手上,影响真空机械手的正常使用。
技术研发人员:李正磊,刘秀坤,李斌全,唐学千,焦成军
受保护的技术使用者:大连连城数控机器股份有限公司
技术研发日:20221220
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!