一种重载桁架机器人的制作方法
本技术涉及搬运机器人,具体为一种重载桁架机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,重载桁架机器人也是机器人的一种。
2、例如授权公告号“cn217345525u”名为重载桁架机器人虽然提供了水平与竖直的轨道,使得机器人能够实现两个方向的搬运操作,设置有第一筋板用于加强支撑板与第二轨道结合面的强度,使得支撑板为抓取部提供足够的支撑力,保证灵活的同时能够承担较大的负载,但现有的重载桁架机器人在使用过程中依然存在,接通重载桁架机器人的外接电源,重载桁架机器人带动机械臂移动,机械臂移动到指定位置后,打开机械抓对物品进行抓取,然后由重载桁架机器人将物品运输到指定位置,由于重载桁架机器人只能实现两个方向的搬运操作,无法将物品进行前后搬运,进而降低了重载桁架机器人的适用范围。
技术实现思路
1、本实用新型的目的是为了解决,重载桁架机器人只能实现两个方向的搬运操作,无法将物品进行前后搬运,进而降低了重载桁架机器人的适用范围,而提出的一种重载桁架机器人。
2、为实现上述目的,本实用新型提供如下技术方案:
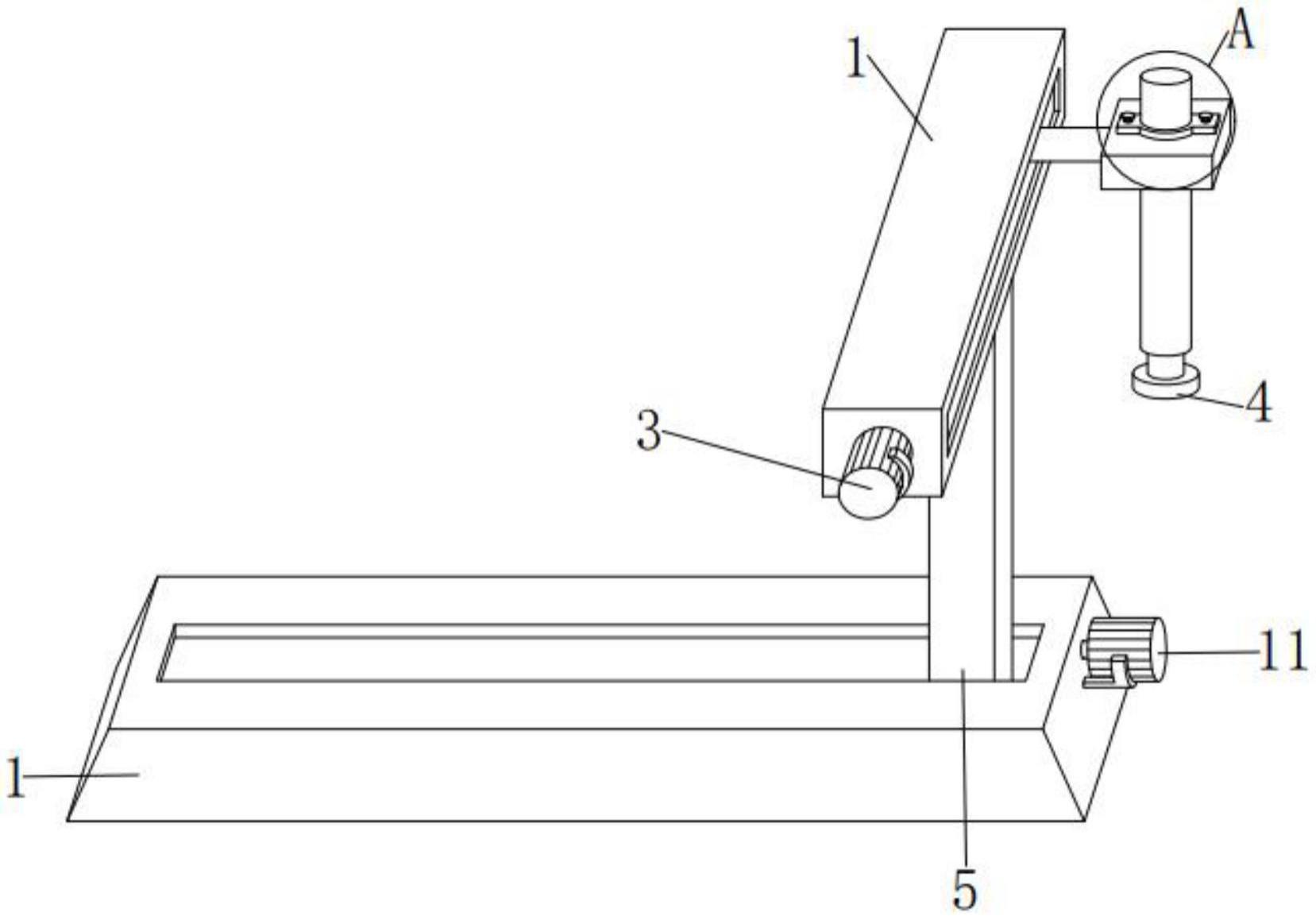
3、设计一种重载桁架机器人,包括顶梁,所述顶梁的内壁设有移动机构,所述顶梁的外壁固接有电机,所述顶梁的底部固接有竖杆,所述竖杆的底部固接有滑板,所述滑板的外壁螺纹相接有螺纹杆,所述螺纹杆的外壁转动相连有底座。
4、优选的,所述移动机构包括丝杠、丝杠螺母、连板、套板、螺栓和液压缸;
5、所述丝杠的外壁与顶梁的内壁转动相连,所述丝杠的外壁与丝杠螺母的内壁螺纹相接,所述丝杠螺母的外侧与顶梁的内壁滑动卡接,所述丝杠螺母的正端面与连板的一端相固接,所述连板的顶部与套板的底部相贴合,所述套板的内壁与螺栓的外壁螺纹相接,所述螺栓的外壁与连板的内螺纹相接,所述套板的内壁与液压缸的外壁相固接,所述液压缸的外壁与连板的内壁相固接。
6、优选的,所述液压缸的底部固接有电磁铁。
7、优选的,所述螺纹杆的外壁固接有槽轮,所述槽轮的外壁转动相连有皮带。
8、优选的,位于顶部所述螺纹杆的一端固接有伺服电机,所述底座的外壁与伺服电机的外壁相固接。
9、本实用新型提出的一种重载桁架机器人,有益效果在于:通过接通电机的外接电源,电机工作时带动丝杠转动,丝杠带动丝杠螺母移动,丝杠螺母带动连板移动,连板带动内侧的液压缸移动到指定位置,接通电磁铁的外接电源,电磁铁工作时将物品吸取上来,通过丝杠带动液压缸实现物品的前后搬运,进而提升了重载桁架机器人的适用范围。
技术特征:
1.一种重载桁架机器人,包括顶梁(1),其特征在于:所述顶梁(1)的内壁设有移动机构(2),所述顶梁(1)的外壁固接有电机(3),所述顶梁(1)的底部固接有竖杆(5),所述竖杆(5)的底部固接有滑板(6),所述滑板(6)的外壁螺纹相接有螺纹杆(7),所述螺纹杆(7)的外壁转动相连有底座(8)。
2.根据权利要求1所述的一种重载桁架机器人,其特征在于:所述移动机构(2)包括丝杠(201)、丝杠螺母(202)、连板(203)、套板(204)、螺栓(205)和液压缸(206);
3.根据权利要求2所述的一种重载桁架机器人,其特征在于:所述液压缸(206)的底部固接有电磁铁(4)。
4.根据权利要求1所述的一种重载桁架机器人,其特征在于:所述螺纹杆(7)的外壁固接有槽轮(9),所述槽轮(9)的外壁转动相连有皮带(10)。
5.根据权利要求1所述的一种重载桁架机器人,其特征在于:位于顶部所述螺纹杆(7)的一端固接有伺服电机(11),所述底座(8)的外壁与伺服电机(11)的外壁相固接。
技术总结
本技术涉及搬运机器人技术领域,尤其是一种一种重载桁架机器人,包括顶梁,所述顶梁的内壁设有移动机构,所述顶梁的外壁固接有电机,所述顶梁的底部固接有竖杆,所述竖杆的底部固接有滑板,所述滑板的外壁螺纹相接有螺纹杆,所述螺纹杆的外壁转动相连有底座。通过接通电机的外接电源,电机工作时带动丝杠移动,丝杠带动丝杠螺母移动,丝杠螺母带动连板移动,连板带动内侧的液压缸移动到指定位置,接通电磁铁的外接电源,电磁铁工作时将物品吸取上来,通过丝杠带动液压缸实现物品的前后搬运,进而提升了重载桁架机器人的适用范围。
技术研发人员:李入
受保护的技术使用者:山东开拓者智能科技有限公司
技术研发日:20221222
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!