一种机器人自动化控制的取料机械爪
本技术属于机械臂,尤其涉及一种机器人自动化控制的取料机械爪。
背景技术:
1、机械手是模仿人手和臂进行动作功能的设备,一般多用来进行抓取搬运物件或进行操作,机械手能够在有害环境下操作以保护人身安全,具有较高的耐力度,满足对重复性工作前的适应能力。
2、中国专利cn205905045u公开了一种机械爪,包括两对称设置的夹板,所述夹板的一端为连接部,另一端为夹取部,其中,所述连接部与机械爪的驱动装置固接,所述夹取部相对于所述连接部向内侧倾斜。本实用新型通过设置两对称设置的夹板,并使夹板的夹取部向内侧倾斜,形成倒v型结构,可以实现对盒体的定点夹取,相对于全接触式的机械手,更容易定位和夹取,上述方案虽然能够进行定位夹取,但仍存在一定的问题,如机械手的定点夹持位置固定,容易影响到对不同尺寸构件的夹持能力,并且可调节能力较弱,不能很好的满足使用需要。
技术实现思路
1、本实用新型的目的在于:为了解决机械手的定点夹持位置固定,容易影响到对不同尺寸构件的夹持能力,并且可调节能力较弱的问题,而提出的一种机器人自动化控制的取料机械爪。
2、为了实现上述目的,本实用新型采用了如下技术方案:
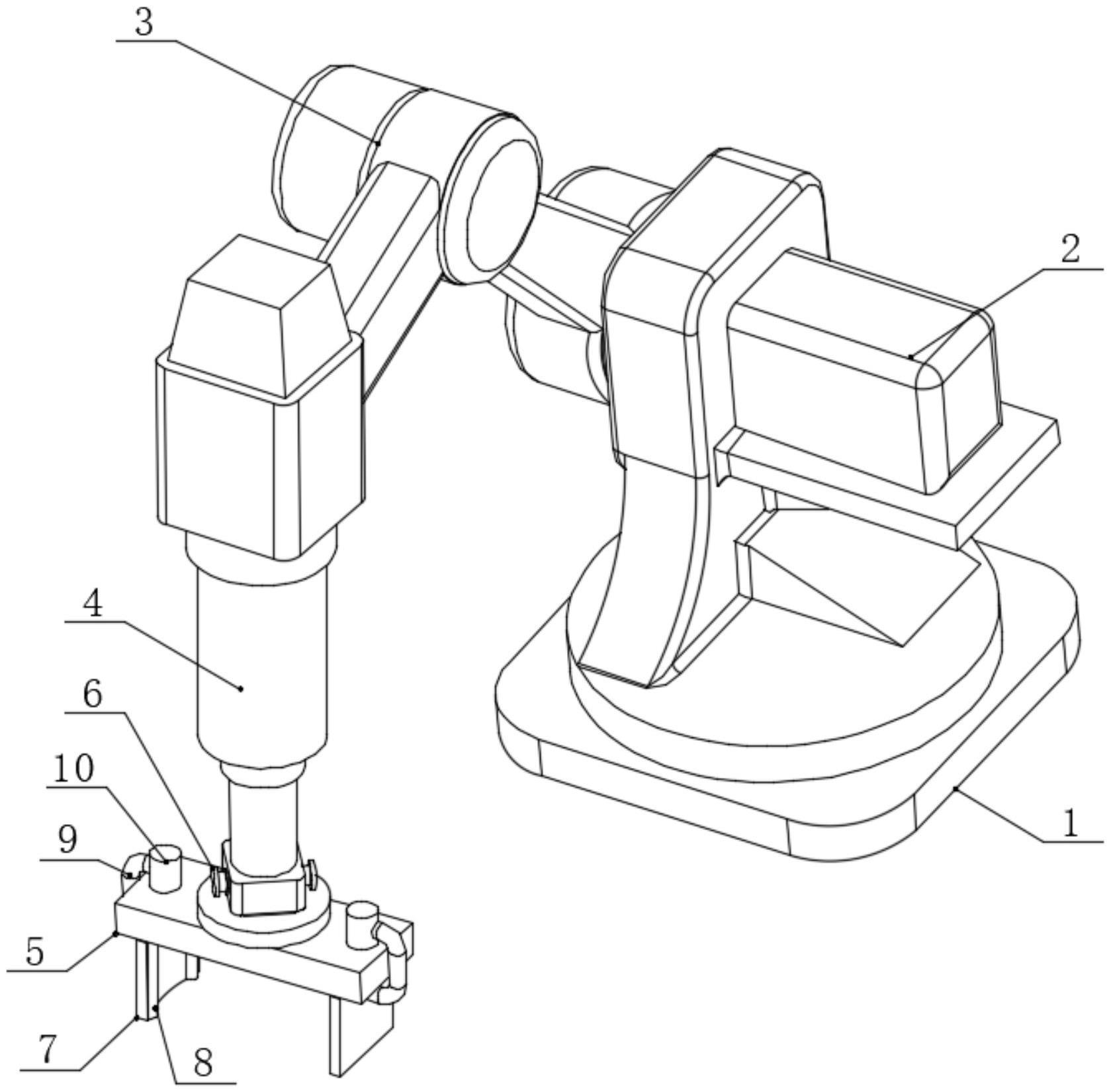
3、一种机器人自动化控制的取料机械爪,包括设于生产线取料处的机架,所述机架顶部固定安装有驱动机构,且驱动机构一侧传动连接有调节臂体,且调节臂体前端固定安装有伸缩机构,所述伸缩机构前端设有卡接机构,且卡接机构底部固定安装有夹持架,所述夹持架底部固定安装有夹持气缸,且夹持气缸活塞杆底端固定安装有限位板,所述限位板一侧两端均固定安装有填充气囊。
4、作为上述技术方案的进一步描述:通过夹持架和夹持气囊,能够实现对两侧限位板相互靠近进行充分夹持限位,提高机械爪抓取固定稳定性。
5、所述限位板内侧截面形状为弧形,且填充气囊位于限位板内腔弧形侧壁。
6、作为上述技术方案的进一步描述:通过设计的限位板,限位板内侧弧形面能够保证与接触面的贴合能力,提高夹持适应性。
7、所述填充气囊一侧连通有连接管,所述连接管另一端连通有气泵,所述气泵固定安装在夹持架顶部。
8、作为上述技术方案的进一步描述:通过设计的连接管,连接管为柔性管,方便限位板移动时方便连接管的展开。
9、所述卡接机构包括卡座,所述卡座固定连接在伸缩机构底端,所述卡座内腔卡接有卡块,所述卡块底部固定连接有卡盘,所述卡盘底部与夹持架顶部固定连接。
10、作为上述技术方案的进一步描述:卡座和卡盘之间的卡接,能够保证卡盘快速卡接能力,提高卡接效率。
11、所述卡盘两侧均嵌设有卡套,且卡套内滑动连接有卡杆,所述卡杆卡接在卡块一侧开设的卡孔内,所述卡杆的直径与卡孔内腔的直径相匹配,所述卡杆外侧壁套设有弹簧,所述弹簧两端分别与卡套和卡杆末端一侧固定连接。
12、作为上述技术方案的进一步描述:通过设计的卡杆,能够保证卡盘和卡块的卡接稳定性。
13、所述卡块的宽度和长度与卡座内腔的宽度和长度相匹配,且卡块和卡座内腔横截面形状均为矩形。
14、作为上述技术方案的进一步描述:卡块和卡座内腔的卡接更加稳定,能够避免发生倾斜滑脱。
15、综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
16、1、本实用新型中,当需要进行取料夹持时,驱动机构能够控制调节壁体以及伸缩机构移动带动两侧限位板移入待夹持区域后,通过夹持气缸活塞杆伸缩控制两侧限位板相互靠近,当限位板相互靠近后能够对构件两侧进行夹持限位,并且弧形的限位板在与构件两侧贴合时,弧形面两侧的填充气囊能够与构件外表面进行单侧接触,从而能够提高对夹持构件的表面限位固定能力,并且通过气泵能够控制填充气囊膨胀展开,从而能够在夹持时快速调节对不同构件表面的贴合适应性。
17、2、本实用新型中,通过设计的卡接机构,当夹持构件差距变大时,能够通过拉动卡杆自卡块一侧卡孔内分离,此时能够拉动夹持架带动顶部卡块自卡座内分离,从而能够快速对夹持架以及底部的限位板进行更换,从而能够方便快速对夹持架进行拆卸后更换,有利于满足对不同夹持尺寸限位板的替换处理。
技术特征:
1.一种机器人自动化控制的取料机械爪,包括设于生产线取料处的机架(1),所述机架(1)顶部固定安装有驱动机构(2),且驱动机构(2)一侧传动连接有调节臂体(3),且调节臂体(3)前端固定安装有伸缩机构(4),其特征在于,所述伸缩机构(4)前端设有卡接机构(6),且卡接机构(6)底部固定安装有夹持架(5),所述夹持架(5)底部固定安装有夹持气缸,且夹持气缸活塞杆底端固定安装有限位板(7),所述限位板(7)一侧两端均固定安装有填充气囊(8)。
2.根据权利要求1所述的一种机器人自动化控制的取料机械爪,其特征在于,所述限位板(7)内侧截面形状为弧形,且填充气囊(8)位于限位板(7)内腔弧形侧壁。
3.根据权利要求1所述的一种机器人自动化控制的取料机械爪,其特征在于,所述填充气囊(8)一侧连通有连接管(9),所述连接管(9)另一端连通有气泵(10),所述气泵(10)固定安装在夹持架(5)顶部。
4.根据权利要求1所述的一种机器人自动化控制的取料机械爪,其特征在于,所述卡接机构(6)包括卡座(604),所述卡座(604)固定连接在伸缩机构(4)底端,所述卡座(604)内腔卡接有卡块(602),所述卡块(602)底部固定连接有卡盘(601),所述卡盘(601)底部与夹持架(5)顶部固定连接。
5.根据权利要求4所述的一种机器人自动化控制的取料机械爪,其特征在于,所述卡盘(601)两侧均嵌设有卡套,且卡套内滑动连接有卡杆(605),所述卡杆(605)卡接在卡块(602)一侧开设的卡孔(603)内,所述卡杆(605)的直径与卡孔(603)内腔的直径相匹配,所述卡杆(605)外侧壁套设有弹簧,所述弹簧两端分别与卡套和卡杆(605)末端一侧固定连接。
6.根据权利要求4所述的一种机器人自动化控制的取料机械爪,其特征在于,所述卡块(602)的宽度和长度与卡座(604)内腔的宽度和长度相匹配,且卡块(602)和卡座(604)内腔横截面形状均为矩形。
技术总结
本技术公开了一种机器人自动化控制的取料机械爪,属于机械臂技术领域,包括设于生产线取料处的机架,所述机架顶部固定安装有驱动机构,且驱动机构一侧传动连接有调节臂体。本技术中,当需要进行取料夹持时,驱动机构能够控制调节壁体以及伸缩机构移动带动两侧限位板移入待夹持区域后,通过夹持气缸活塞杆伸缩控制两侧限位板相互靠近,当限位板相互靠近后能够对构件两侧进行夹持限位,并且弧形的限位板在与构件两侧贴合时,弧形面两侧的填充气囊能够与构件外表面进行单侧接触,提高对夹持构件的表面限位固定能力,通过气泵能够控制填充气囊膨胀展开,能够在夹持时快速调节对不同构件表面的贴合适应性。
技术研发人员:伦志新,王蕾,王江,谢毅辉,齐晨赛,刘金树
受保护的技术使用者:唐山学院
技术研发日:20221224
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!