一种吸盘式工业机器人的制作方法
本技术属于工业机器人,具体涉及一种吸盘式工业机器人。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。相比于传统的工业设备,工业机器人有众多的优势,比如机器人具有易用性、智能化水平高、生产效率及安全性高、易于管理且经济效益显著等特点,使得它们可以在高危环境下进行作业。一般来说,工业机器人由三大部分六个子系统组成,三大部分是机械部分、传感部分和控制部分。
2、吸盘式工业机器人一般适用于光滑平整表面工件的移动和加工,吸盘式结构具有工作效率高,稳定性好,操作简单,结构简单等好处,但是在吸盘式机器人在工作时无法保证所吸附面的表面完全没有灰尘和颗粒物,长时间使用吸盘与工件的接触面上会残留大量的灰尘,若不加以清洁,将会影响长期使用的稳定性。
技术实现思路
1、为解决现有技术中存在的上述问题,本实用新型提供了一种吸盘式工业机器人,具有自动化清洁吸盘表面的特点。
2、为实现上述目的,本实用新型提供如下技术方案:一种吸盘式工业机器人,包括工业机器人主体,所述工业机器人主体上安装有吸盘模块,所述工业机器人主体靠近吸盘模块一侧安装有翻转组件,所述翻转组件与工业机器人主体连接另一端安装有清洁组件,所述翻转组件下端与工业机器人主体之间还安装有配合的吸尘组件,所述清洁组件和吸尘组件与翻转组件的连接端通过翻转组件在工业机器人主体顶部上下翻转,所述翻转组件翻转至最底部时清洁组件上表面与吸盘模块底部平行的同时还相互接触。
3、作为本实用新型的一种吸盘式工业机器人优选技术方案,所述翻转组件包括转动安装在工业机器人主体安装吸盘模块上端的翻转支架和固定安装在翻转支架另一端的组合盘,以及固定在翻转支架与工业机器人主体转动轴心一侧的从动齿轮和通过支架固定安装在工业机器人主体上的翻转电机。
4、作为本实用新型的一种吸盘式工业机器人优选技术方案,所述清洁组件包括固定安装在组合盘底部中心的清洁电机和安装在清洁电机输出端的中心齿轮,以及啮合在中心齿轮与组合盘之间的若干个外环齿轮,若干个外环齿轮上呈间隔式分布有若干个粗清洁刷和细清洁刷。
5、作为本实用新型的一种吸盘式工业机器人优选技术方案,所述吸尘组件包括固定安装在组合盘底部的吸尘盘和设置在吸尘盘侧表面的两个吸尘外接口,以及固定在组合盘中的吸尘网,还包括固定安装在工业机器人主体靠近吸盘模块一侧手臂上的吸尘器。
6、作为本实用新型的一种吸盘式工业机器人优选技术方案,所述中心齿轮、外环齿轮、组合盘之间有相互啮合的环形齿圈。
7、作为本实用新型的一种吸盘式工业机器人优选技术方案,两个所述吸尘外接口通过中空风管与吸尘器进气端连接。
8、与现有技术相比,本实用新型的有益效果是:首先,本实用新型中的清洁组件采用行星齿轮结构设置双向同步对吸盘模块进行清洁,并使用两种或者不同尺寸的清洁刷,以达到更好的清洁效果;其次通过设置吸尘组件将清洁组件清洁后的灰尘杂质颗粒物快速向外吸附,避免灰尘再次停留在工作台上;最后通过翻转组件来实现清洁组件在使用和不使用时的切换,只有在需要清洁时候才切换至工作位,不清洁情况下位于吸盘模块上方,也不影响其正常工作和运行。
技术特征:
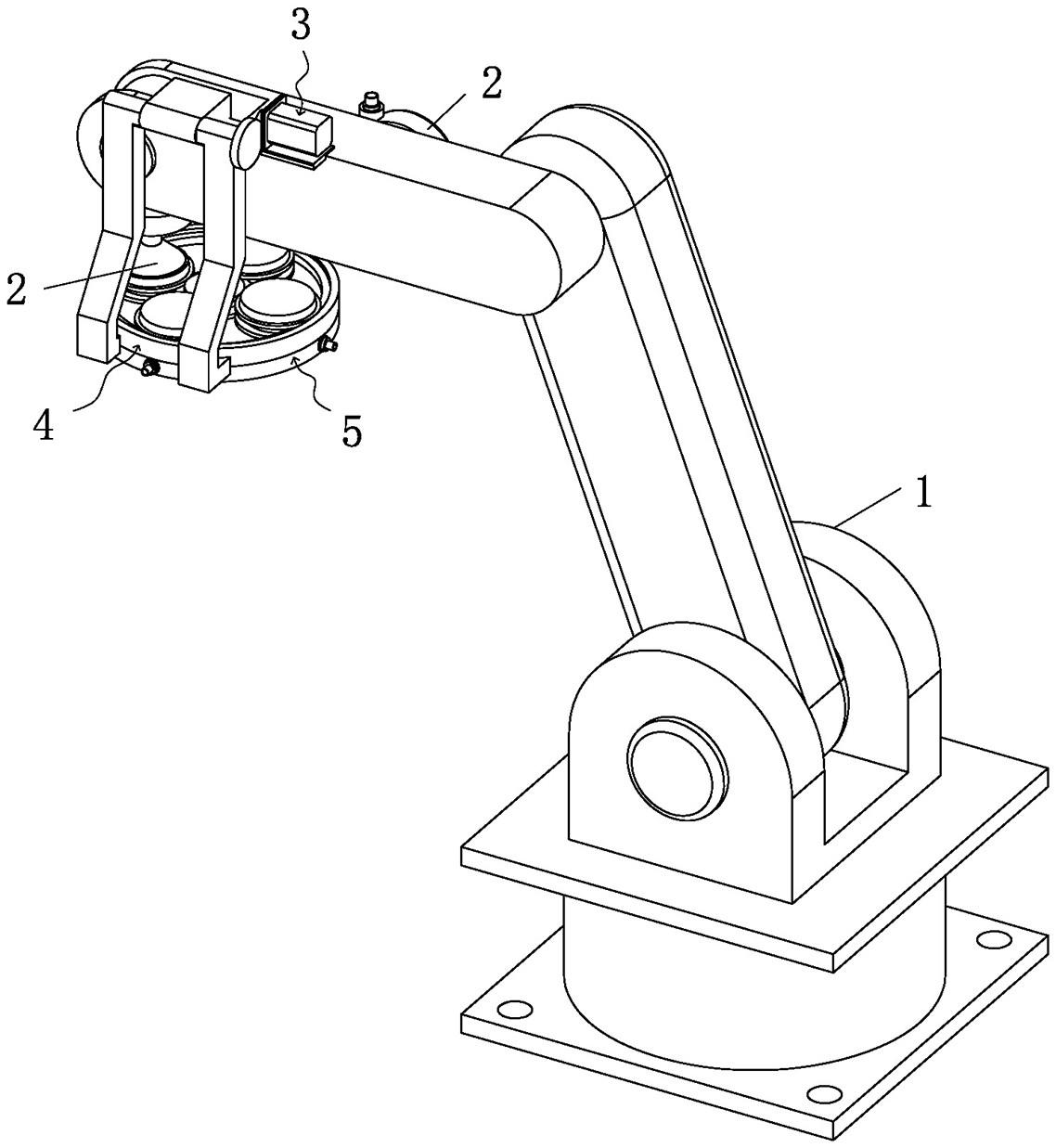
1.一种吸盘式工业机器人,包括工业机器人主体(1),所述工业机器人主体(1)上安装有吸盘模块(2),其特征在于:所述工业机器人主体(1)靠近吸盘模块(2)一侧安装有翻转组件(3),所述翻转组件(3)与工业机器人主体(1)连接另一端安装有清洁组件(4),所述翻转组件(3)下端与工业机器人主体(1)之间还安装有配合的吸尘组件(5),所述清洁组件(4)和吸尘组件(5)与翻转组件(3)的连接端通过翻转组件(3)在工业机器人主体(1)顶部上下翻转,所述翻转组件(3)翻转至最底部时清洁组件(4)上表面与吸盘模块(2)底部平行的同时还相互接触。
2.根据权利要求1所述的一种吸盘式工业机器人,其特征在于:所述翻转组件(3)包括转动安装在工业机器人主体(1)安装吸盘模块(2)上端的翻转支架(31)和固定安装在翻转支架(31)另一端的组合盘(32),以及固定在翻转支架(31)与工业机器人主体(1)转动轴心一侧的从动齿轮(33)和通过支架固定安装在工业机器人主体(1)上的翻转电机(34)。
3.根据权利要求1所述的一种吸盘式工业机器人,其特征在于:所述清洁组件(4)包括固定安装在组合盘(32)底部中心的清洁电机(41)和安装在清洁电机(41)输出端的中心齿轮(42),以及啮合在中心齿轮(42)与组合盘(32)之间的若干个外环齿轮(43),若干个外环齿轮(43)上呈间隔式分布有若干个粗清洁刷(44)和细清洁刷(45)。
4.根据权利要求1所述的一种吸盘式工业机器人,其特征在于:所述吸尘组件(5)包括固定安装在组合盘(32)底部的吸尘盘(51)和设置在吸尘盘(51)侧表面的两个吸尘外接口(52),以及固定在组合盘(32)中的吸尘网(53),还包括固定安装在工业机器人主体(1)靠近吸盘模块(2)一侧手臂上的吸尘器(54)。
5.根据权利要求3所述的一种吸盘式工业机器人,其特征在于:所述中心齿轮(42)、外环齿轮(43)、组合盘(32)之间有相互啮合的环形齿圈。
6.根据权利要求4所述的一种吸盘式工业机器人,其特征在于:两个所述吸尘外接口(52)通过中空风管与吸尘器(54)进气端连接。
技术总结
本技术属于工业机器技术领域,尤其为一种吸盘式工业机器人,包括工业机器人主体,所述工业机器人主体上安装有吸盘模块,所述工业机器人主体靠近吸盘模块一侧安装有翻转组件,所述翻转组件与工业机器人主体连接另一端安装有清洁组件,首先,本技术中的清洁组件采用行星齿轮结构设置双向同步对吸盘模块进行清洁,并使用两种或者不同尺寸的清洁刷,以达到更好的清洁效果;其次通过设置吸尘组件将清洁组件清洁后的灰尘杂质颗粒物快速向外吸附,避免灰尘再次停留在工作台上;最后通过翻转组件来实现清洁组件在使用和不使用时的切换,只有在需要清洁时候才切换至工作位,不清洁情况下位于吸盘模块上方,也不影响其正常工作和运行。
技术研发人员:杨俊,杨鲜君,杨海燕
受保护的技术使用者:台州昌泓机器人有限公司
技术研发日:20221226
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!