一种端拾器及机器人的制作方法
本技术涉及机器人应用,尤其涉及一种端拾器及机器人。
背景技术:
1、随着智能机器人的发展和人工成本的逐年上升,采用机器人来拆码垛搬运物品已广泛地应用于工业生产等行业中,机器人代替重复单一的体力劳动,可以节省人工劳动力。
2、传统的机器人端拾器在工作时,通常是拿取一个或者拿取一排,不能根据搬运物件的特点以及使用需求来灵活调整拿取的间距以及摆放的间距,使用非常受限,影响着拆码垛的效率。
技术实现思路
1、本实用新型提供一种端拾器及机器人,可以灵活调整拿取的间距和摆放的间距。
2、为了实现上述目的,本实用新型提供一种端拾器,包括:
3、机架;
4、第一连杆组,所述第一连杆组活动设置在所述机架的内部,所述第一连杆组包括沿第一方向并排排布的多个第一杆件;
5、拾取组件,各所述第一杆件均设置有若干个所述拾取组件,所述拾取组件用于拾取待拾取物件;
6、变距组件,所述第一连杆组的至少一端设置有所述变距组件;
7、驱动组件,所述驱动组件设置于所述机架上,且所述驱动组件与所述变距组件连接,所述驱动组件被配置为驱动所述变距组件的姿态改变,以使所述变距组件用于至少调节各所述第一杆件之间的间距。
8、本实用新型提供的一种端拾器,通过第一连杆组的至少一端设置有变距组件,变距组件可以灵活调节各第一杆件之间的间距,从而使得连接于第一杆件的拾取组件之间的间距改变,使用灵活方便,可以根据搬运物件的特点以及使用需求,来调节拾取组件之间的间距大小,使得可以对待拾取物件拾取后放置的间距进行调整,扩大端拾器的适用范围。
9、在一种可能实施的方式中,所述变距组件包括:
10、导向架,所述导向架连接于所述驱动组件,所述导向架内开设有导向槽;
11、连杆单元,所述连杆单元包括多个平行四边形连杆机构,所述平行四边形连杆机构具有沿对角分布的两对顶角,其中一对所述顶角均连接有第一转轴,其中另一对所述顶角均连接有第二转轴,相邻的两个所述平行四边形连杆机构共用一个所述第一转轴,且两个所述第二转轴其中的一个所述第二转轴连接有滚轮,所述滚轮滚动设置在所述导向槽内。
12、在一种可能实施的方式中,连接于所述第一连杆组的所述变距组件的各所述第一转轴对应连接于各所述第一杆件。
13、在一种可能实施的方式中,连接于所述第一连杆组的所述变距组件的所述导向槽沿第一方向延伸。
14、在一种可能实施的方式中,所述拾取组件包括:固定架,所述固定架与所述第一杆件滑动连接;
15、第一拾取组件,所述第一拾取组件设置于所述固定架,所述第一拾取组件用于负压吸附所述待拾取物件;和/或
16、第二拾取组件,所述第二拾取组件设置于所述固定架,所述第二拾取组件用于磁性吸附所述待拾取物件。
17、在一种可能实施的方式中,所述驱动组件包括:
18、电机,所述电机固定连接于所述机架;
19、丝杠螺母机构,所述丝杠螺母机构包括丝杠和内螺纹块,所述丝杠转动设置在所述机架上,且所述丝杠与所述电机的输出轴连接,所述内螺纹块螺纹连接于所述丝杠的外周面,且所述内螺纹块与所述导向架固定连接。
20、在一种可能实施的方式中,还包括第二连杆组,所述第二连杆组活动设置在所述机架的内部,且所述第二连杆组位于所述第一连杆组的上侧或下侧,所述第二连杆组包括沿第二方向并排排布的多个第二杆件,各所述拾取组件的所述固定架均滑动连接于一个所述第一杆件和一个所述第二杆件。
21、在一种可能实施的方式中,所述第二连杆组的至少一端连接有所述变距组件,连接于所述第二连杆组的所述变距组件用于调节相邻的两个所述第二杆件之间的间距,连接于所述第二连杆组的所述变距组件的所述导向槽沿所述第二方向延伸。
22、在一种可能实施的方式中,所述第二杆件的两端均连接有连接板,连接于所述第二连杆组的所述变距组件的各所述第一转轴与各所述连接板对应连接。
23、在一种可能实施的方式中,所述第二杆件设置有第一滑轨,所述第一滑轨沿所述第一方向设置,所述固定架的面向所述第二杆件的一面设置有第一滑块,所述第一滑块沿所述第一滑轨滑动。
24、在一种可能实施的方式中,所述机架包括一对第一立板和一对第二立板,所述第一立板和所述第二立板首尾相接围成矩形框;
25、所述第一立板的内壁均设置有导向轨,所述导向轨沿所述第二方向延伸,所述连接板的面向所述导向轨的一面设置有沿所述导向轨滑动的导向滑块;
26、所述第二立板的内壁均设置有第一滑槽,所述第一滑槽沿所述第一方向延伸,所述第一转轴沿所述第一滑槽滑动。
27、本实用新型还提供一种机器人,包括上述的端拾器。
28、本实用新型提供的一种端拾器,能够将一种阵列摆放的物件变换到另一种阵列来放置,以满足不同的托盘包装需求,通过变距组件能够快速的改变各行各列的间距,极大的提升了拆码垛的效率。
29、本实用新型提供的一种端拾器及机器人,能够快速实现变距摆放,避免占用过多的机器人节拍,提高搬运效率。
30、本实用新型提供的一种端拾器,能够将一种阵列摆放的物件变换到另一种阵列来放置,以满足不同的托盘包装需求,通过变距组件能够快速的改变各行各列的间距,极大的提升了拆码垛的效率
31、除了上面所描述的本实用新型实施例解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果外,本实用新型实施例提供的一种端拾器及机器人所能解决的其他技术问题、技术方案中包含的其他技术特征以及这些技术特征带来的有益效果,将在具体实施方式中作进一步详细的说明。
技术特征:
1.一种端拾器,其特征在于,包括:
2.根据权利要求1所述的端拾器,其特征在于,所述变距组件(50)包括:
3.根据权利要求2所述的端拾器,其特征在于,连接于所述第一连杆组(20)的所述变距组件(50)的各所述第一转轴(522)对应连接于各所述第一杆件(21)。
4.根据权利要求2所述的端拾器,其特征在于,连接于所述第一连杆组(20)的所述变距组件(50)的所述导向槽(511)沿第一方向延伸。
5.根据权利要求2-4任一所述的端拾器,其特征在于,所述拾取组件(40)包括:固定架(41),所述固定架(41)与所述第一杆件(21)滑动连接;
6.根据权利要求2-4任一所述的端拾器,其特征在于,所述驱动组件(60)包括:
7.根据权利要求5所述的端拾器,其特征在于,还包括第二连杆组(30),所述第二连杆组(30)活动设置在所述机架(10)的内部,且所述第二连杆组(30)位于所述第一连杆组(20)的上侧或下侧,所述第二连杆组(30)包括沿第二方向并排排布的多个第二杆件(31),各所述拾取组件(40)的所述固定架(41)均滑动连接于一个所述第一杆件(21)和一个所述第二杆件(31)。
8.根据权利要求7所述的端拾器,其特征在于,所述第二连杆组(30)的至少一端连接有所述变距组件(50),连接于所述第二连杆组(30)的所述变距组件(50)的所述导向槽(511)沿所述第二方向延伸,连接于所述第二连杆组(30)的所述变距组件(50)用于调节相邻的两个所述第二杆件(31)之间的间距。
9.根据权利要求7所述的端拾器,其特征在于,所述第二杆件(31)的两端均连接有连接板(32),连接于所述第二连杆组(30)的所述变距组件(50)的各所述第一转轴(522)与各所述连接板(32)对应连接。
10.根据权利要求7所述的端拾器,其特征在于,所述第二杆件(31)设置有第一滑轨(311),所述第一滑轨(311)沿所述第一方向设置,所述固定架(41)的面向所述第二杆件(31)的一面设置有第一滑块(411),所述第一滑块(411)沿所述第一滑轨(311)滑动。
11.根据权利要求9所述的端拾器,其特征在于,所述机架(10)包括一对第一立板(11)和一对第二立板(12),所述第一立板(11)和所述第二立板(12)首尾相接围成矩形框;
12.一种机器人,其特征在于,包括权利要求1-11任一所述的端拾器。
技术总结
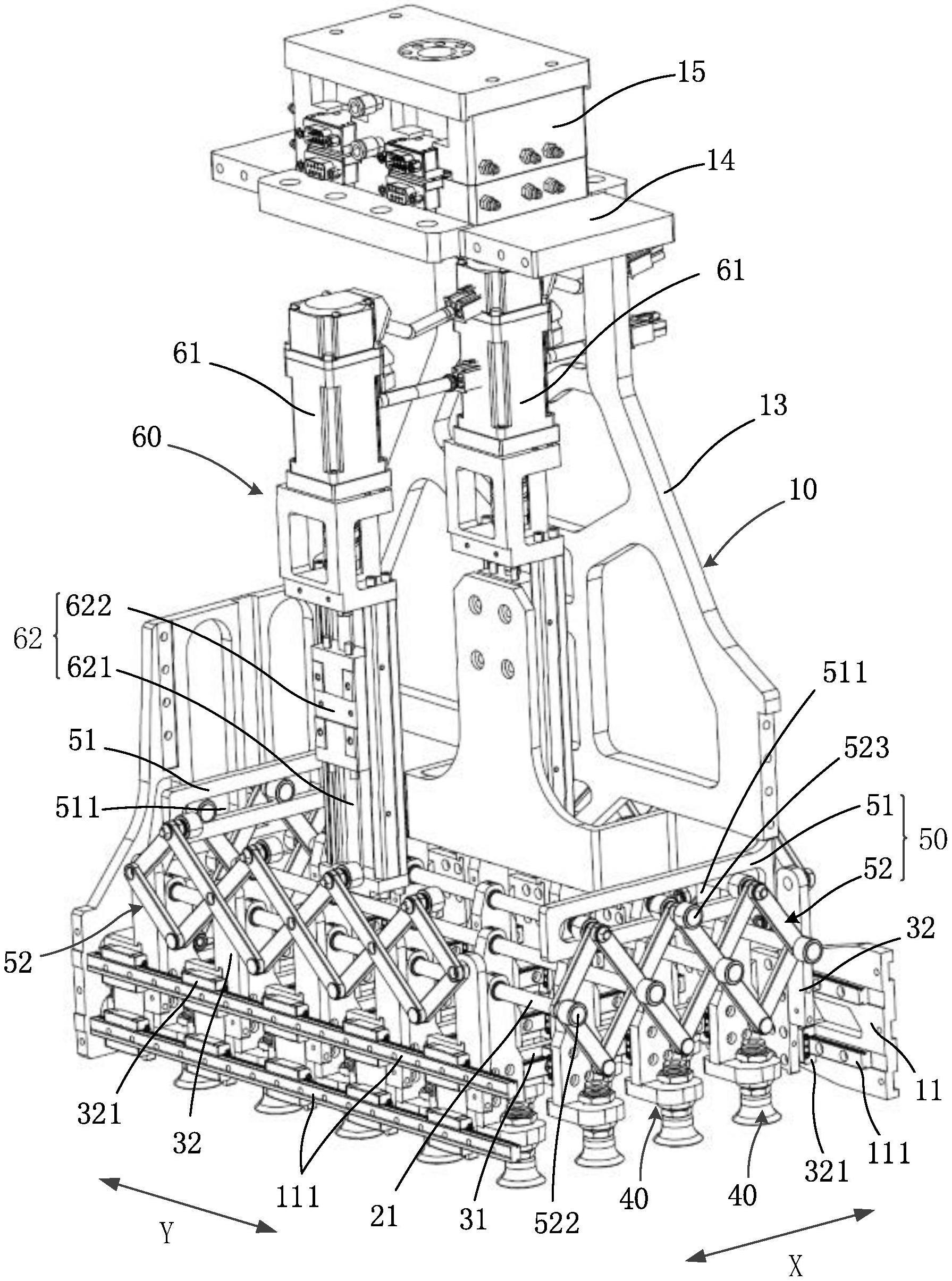
本技术提供一种端拾器及机器人,其中,本技术提供的一种端拾器,包括:机架、第一连杆组、拾取组件、变距组件和驱动组件,所述第一连杆组活动设置在所述机架的内部,所述第一连杆组包括沿第一方向并排排布的多个第一杆件;各所述第一杆件均设置有若干个所述拾取组件,所述拾取组件用于拾取待拾取物件;所述第一连杆组的至少一端设置有所述变距组件;所述驱动组件设置于所述机架上,且所述驱动组件与所述变距组件连接,所述驱动组件被配置为驱动所述变距组件的姿态改变,以使所述变距组件用于至少调节各所述第一杆件之间的间距。本技术可以灵活调整拿取的间距和摆放的间距。
技术研发人员:周平华,王康康,季浩,付翱
受保护的技术使用者:梅卡曼德(上海)机器人科技有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!