一种磁吸机械手脱料结构的制作方法
本技术涉及机器人,尤其涉及磁吸式机械手领域。
背景技术:
1、随着生产自动化的程度越来越高,需要使用到机器手臂进行转运的领域业越来越多,其中有一类是利用电磁铁吸住产品后进行转运,当转运到达设定位置之后,在关闭电磁铁,则产品会自动卸下,若产品自重大,则卸料一般比较可靠,若产品自重小,如小铁片结构,会因为电磁铁断电后的残余磁力,虽无法完全将产品吸起来,但可能会带动产品偏移,影响后续精准的生产加工。
2、例如公开号为cn212919431u,公开日为2021年4月9日,专利名称为《一种具有锁紧功能的磁吸附转运机械手》的公开文献,公开了磁吸附转运机械手,包括支撑底座和滑槽,所述支撑底座的上方设置有锁紧螺母,且锁紧螺母的内部设置有支撑杆,所述第一转轴的下方设置有第一夹持件,且第一夹持件的下方设置有第一电磁铁,所述连接柱的左侧设置有第二转轴,且第二转轴的下方设置有第二夹持件,所述第二夹持件的下方设置有第二电磁铁,所述第二夹持件的内侧设置有支撑弹簧,所述滑槽设置于支撑底座的下方,且滑槽的左侧设置有第二气缸,所述滑槽的前后两侧均设置有滑槽挡板。该具有锁紧功能的磁吸附转运机械手设置有第一电磁铁和第二电磁铁通电后能够靠近吸附。
3、上述现有技术也无法解决可靠卸下小型产品的问题,仍然可能因为残余磁力导致产品偏移,可能造成后续生产加工出现偏差,产生大量的残次品。
技术实现思路
1、本实用新型所要解决的技术问题是实现一种确保磁吸式机械手能够可靠卸料,保证产品放置位置精准的机构。
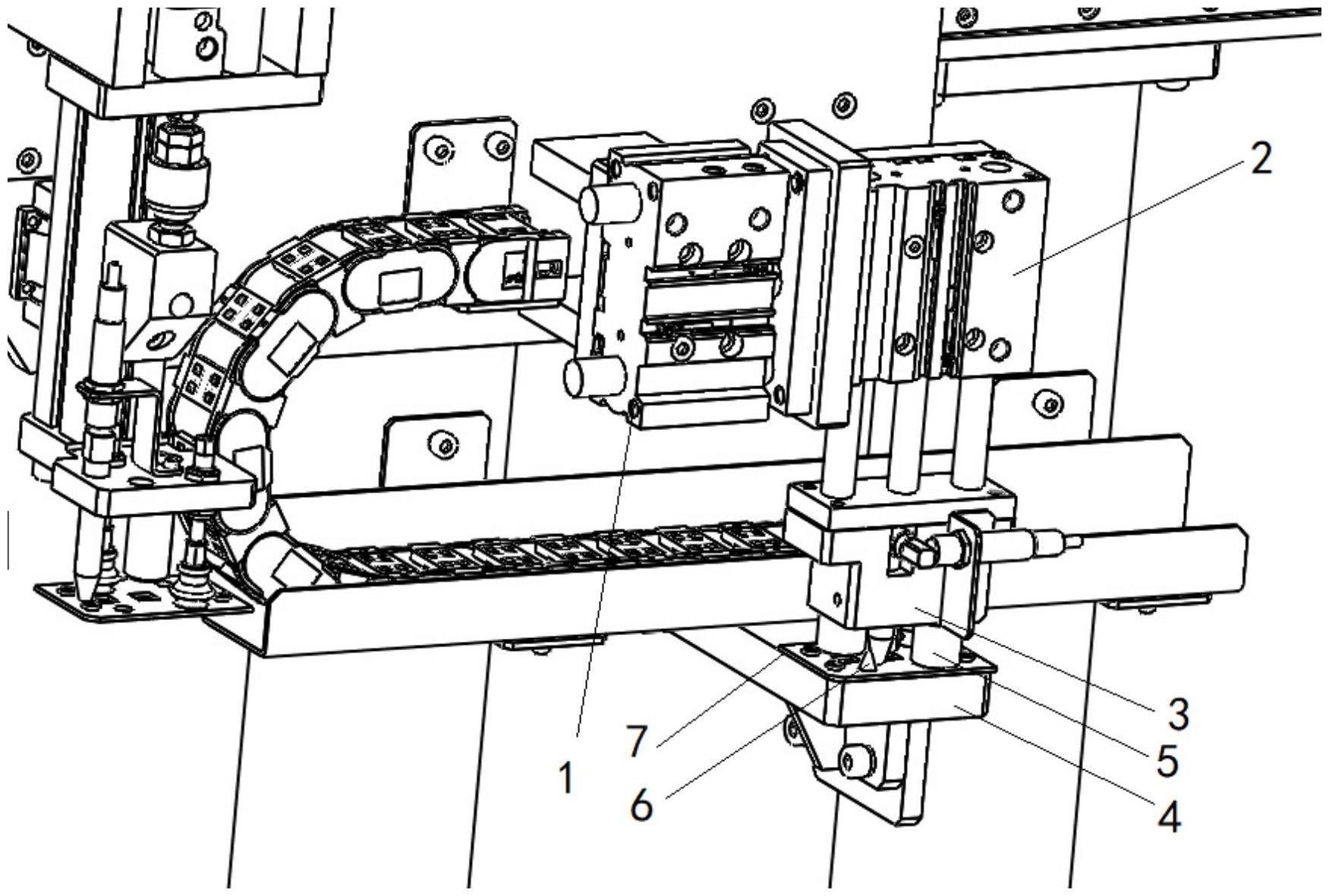
2、为了实现上述目的,本实用新型采用的技术方案为:一种磁吸机械手脱料结构,抓取机构的底部设有用于吸住产品的电磁铁,所述产品上设有至少一个用于定位的定位孔,所述产品通过抓取机构放置在放料平台上,所述放料平台上设有与定位孔位置配合的定位柱。
3、所述抓取机构固定在升降机构的伸缩杆末端,所述升降机构固定在平移机构的伸缩杆末端。
4、所述取料平台上也设有与定位孔位置配合的定位柱,所述取料平台和放料平台均在磁吸机械手的活动范围之内。
5、所述定位柱为上小下大的圆锥形或圆锥台形结构,所述定位柱底部的尺寸与定位孔间隙配合。
6、所述产品上的定位孔设有两个,所述取料平台和放料平台上均设有两个与定位孔位置对应的定位柱。
7、所述产品为铁质片状结构。
8、所述抓取机构的侧面设有感应障碍物信息的行程开关,所述行程开关连接并输出感应信号至磁吸机械手的控制机柜。
9、所述控制机柜通过数据线连接并输出控制信号至平移机构、升降机构、抓取机构和电磁铁。
10、本实用新型的优点在于结构简单,定位孔可以利用产品上之前冲压的孔洞,结构简单,相对于目前设备的改进较小,降低了设备升级成本,能够完全保证产品卸料位置精准,可以直接在放料平台完成后续冲、压工序。
技术特征:
1.一种磁吸机械手脱料结构,其特征在于:抓取机构的底部设有用于吸住产品的电磁铁,所述产品上设有至少一个用于定位的定位孔,所述产品通过抓取机构放置在放料平台上,所述放料平台上设有与定位孔位置配合的定位柱。
2.根据权利要求1所述的磁吸机械手脱料结构,其特征在于:所述抓取机构固定在升降机构的伸缩杆末端,所述升降机构固定在平移机构的伸缩杆末端。
3.根据权利要求2所述的磁吸机械手脱料结构,其特征在于:取料平台和放料平台均在磁吸机械手的活动范围之内,所述取料平台上也设有与定位孔位置配合的定位柱。
4.根据权利要求3所述的磁吸机械手脱料结构,其特征在于:所述定位柱为上小下大的圆锥形或圆锥台形结构,所述定位柱底部的尺寸与定位孔间隙配合。
5.根据权利要求4所述的磁吸机械手脱料结构,其特征在于:所述产品上的定位孔设有两个,所述取料平台和放料平台上均设有两个与定位孔位置对应的定位柱。
6.根据权利要求1-5中任一所述的磁吸机械手脱料结构,其特征在于:所述产品为铁质片状结构。
7.根据权利要求6所述的磁吸机械手脱料结构,其特征在于:所述抓取机构的侧面设有感应障碍物信息的行程开关,所述行程开关连接并输出感应信号至磁吸机械手的控制机柜。
8.根据权利要求7所述的磁吸机械手脱料结构,其特征在于:所述控制机柜通过数据线连接并输出控制信号至平移机构、升降机构、抓取机构和电磁铁。
技术总结
本技术揭示了一种磁吸机械手脱料结构,抓取机构的底部设有用于吸住产品的电磁铁,所述产品上设有至少一个用于定位的定位孔,所述产品通过抓取机构放置在放料平台上,所述放料平台上设有与定位孔位置配合的定位柱。本技术的优点在于结构简单,定位孔可以利用产品上之前冲压的孔洞,结构简单,相对于目前设备的改进较小,降低了设备升级成本,能够完全保证产品卸料位置精准,可以直接在放料平台完成后续冲、压工序。
技术研发人员:段宗军,陈轩,陈安伟,王文青,许同杨
受保护的技术使用者:安徽鲲鹏装备模具制造有限公司
技术研发日:20221228
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!