一种固定机构及焊接机器人的制作方法
本技术涉及焊接机器人领域,具体为一种固定机构及焊接机器人。
背景技术:
1、焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等,但是焊接机器人基座存在固定缺陷,处于运动状态时,容易倾斜等。
2、但是目前焊接机器人采用焊接一体化基座,焊接机器人处于运动状态时,整体倾斜比较严重,焊接抖动严重,内置稳定性不佳,影响焊接机器人焊接运动,两侧固定面积有限,难以支撑整个焊接机器人。
技术实现思路
1、本实用新型的目的在于提供一种固定机构及焊接机器人,以解决上述背景技术中提出的问题。
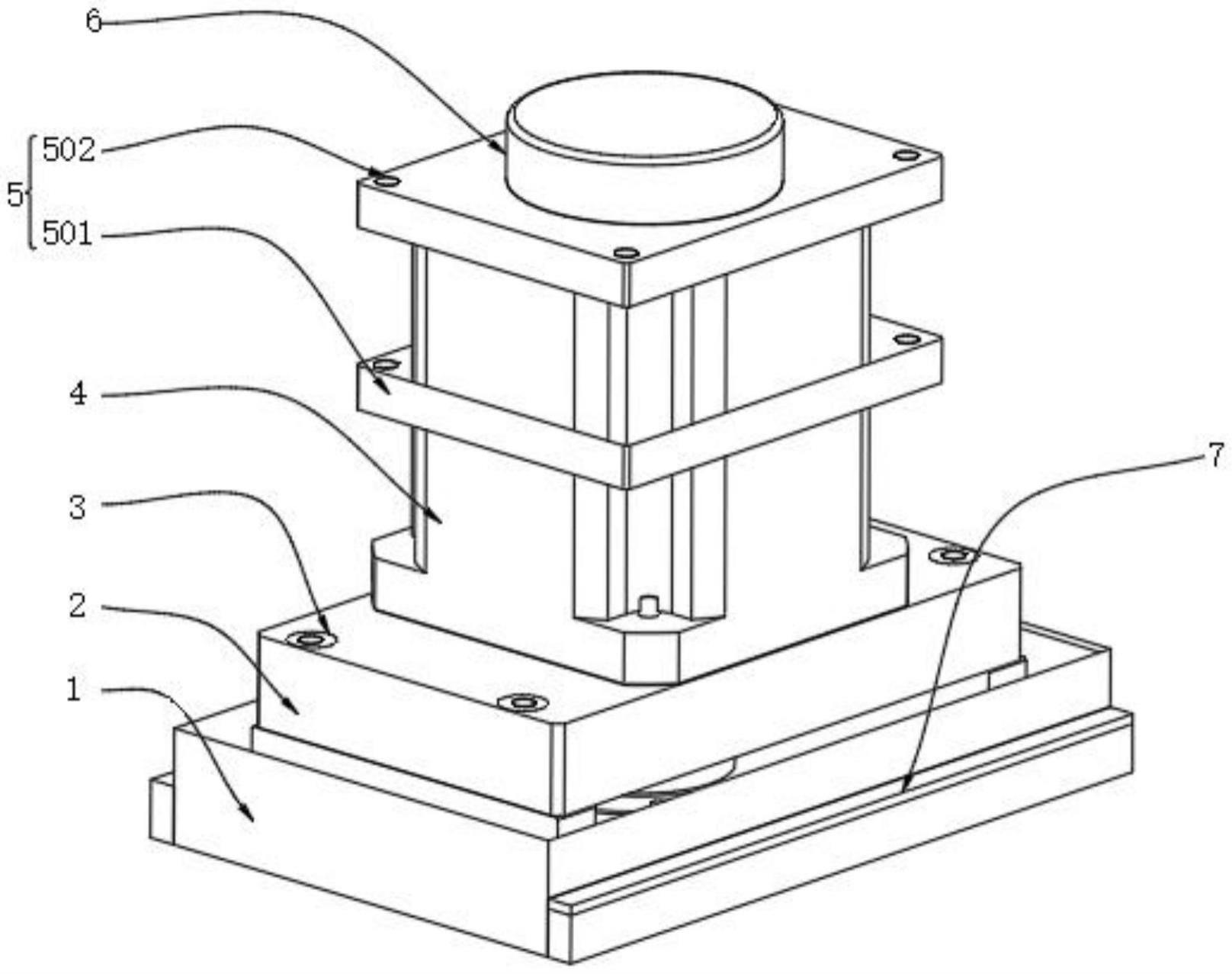
2、为实现上述目的,本实用新型提供如下技术方案:一种固定机构,包括机器人固定基座,所述机器人固定基座的顶端设置有固定盘,且固定盘的中部贯穿有内置支撑组件,内置支撑组件的顶端设置有焊接机器人机械臂,且焊接机器人机械臂的上方安装有固定锁扣机构,固定锁扣机构的中部设置有机械臂架,机器人固定基座的两侧安装有基座展开组件,焊接机器人机械臂的中部设置有套板,且套板的上方滑动安装有固定板。
3、优选的,所述机器人固定基座与固定盘之间为固定连接,且固定盘与内置支撑组件之间为螺纹连接。
4、优选的,所述内置支撑组件贯穿于焊接机器人机械臂内部,且焊接机器人机械臂与固定锁扣机构之间为活动连接。
5、优选的,所述套板嵌入安装于固定板的下方,且套板通过固定板与焊接机器人机械臂构成卡扣结构。
6、优选的,所述内置支撑组件由贯穿柱和支撑柱,贯穿柱螺纹贯穿于内置支撑组件四周,内置支撑组件的中部嵌入贯穿有支撑柱。
7、优选的,所述基座展开组件由展开滑轨板和固定件板,机器人固定基座的两侧贯穿有展开滑轨板,展开滑轨板的内部安装有固定件板。
8、优选的,所述展开滑轨板与固定件板之间为螺纹连接,且展开滑轨板通过固定件板与机器人固定基座构成滑动结构。
9、一种焊接机器人,该焊接机器人安装有如上所述的固定机构。
10、与现有技术相比,本实用新型的有益效果是:
11、本实用新型,有效的将套板和固定板螺纹连接于,固定锁扣机构和焊接机器人机械臂连接处,可对焊接机器人进行固定安装,改变焊接机器人采用焊接一体化基座,活动安装的套板和固定板固定结构,利于焊接机器人处于运动状态,避免整体倾斜,降低焊接抖动幅度,提高内置稳定性。
12、本实用新型有效的将支撑柱贯穿支撑于,固定锁扣机构和焊接机器人机械臂内部,使用者可将贯穿柱螺纹连接,固定于固定锁扣机构和焊接机器人机械臂连接处,提高焊接机器人内置稳定性,利于焊接机器人焊接运动调节。
13、本实用新型,当焊接机器人进行固定安装使用时,可将机器人固定基座、固定盘和内置支撑组件,进行定位安装,使用者可将展开滑轨板与固定件板,滑动展开对螺纹连接的固定件板进行定位固定,扩大两侧固定面积,支撑整个焊接机器人。
技术特征:
1.一种固定机构,包括机器人固定基座(1);
2.根据权利要求1所述的一种固定机构,其特征在于:所述机器人固定基座(1)与固定盘(2)之间为固定连接,且固定盘(2)与内置支撑组件(3)之间为螺纹连接。
3.根据权利要求1所述的一种固定机构,其特征在于:所述内置支撑组件(3)贯穿于焊接机器人机械臂(4)内部,且焊接机器人机械臂(4)与固定锁扣机构(5)之间为活动连接。
4.根据权利要求1所述的一种固定机构,其特征在于:所述套板(501)嵌入安装于固定板(502)的下方,且套板(501)通过固定板(502)与焊接机器人机械臂(4)构成卡扣结构。
5.根据权利要求1所述的一种固定机构,其特征在于:所述内置支撑组件(3)由贯穿柱(301)和支撑柱(302),贯穿柱(301)螺纹贯穿于内置支撑组件(3)四周,内置支撑组件(3)的中部嵌入贯穿有支撑柱(302)。
6.根据权利要求1所述的一种固定机构,其特征在于:所述基座展开组件(7)由展开滑轨板(701)和固定件板(702),机器人固定基座(1)的两侧贯穿有展开滑轨板(701),展开滑轨板(701)的内部安装有固定件板(702)。
7.根据权利要求6所述的一种固定机构,其特征在于:所述展开滑轨板(701)与固定件板(702)之间为螺纹连接,且展开滑轨板(701)通过固定件板(702)与机器人固定基座(1)构成滑动结构。
8.一种焊接机器人,其特征在于:该焊接机器人安装有如权利要求1-7任意一项所述的固定机构。
技术总结
本技术公开了一种固定机构及焊接机器人,包括机器人固定基座,所述机器人固定基座的顶端设置有固定盘,且固定盘的中部贯穿有内置支撑组件,内置支撑组件的顶端设置有焊接机器人机械臂,且焊接机器人机械臂的上方安装有固定锁扣机构,固定锁扣机构的中部设置有机械臂架,机器人固定基座的两侧安装有基座展开组件,焊接机器人机械臂的中部设置有套板,有益效果为:本技术,有效的将套板和固定板螺纹连接于,固定锁扣机构和焊接机器人机械臂连接处,可对焊接机器人进行固定安装,改变焊接机器人采用焊接一体化基座,活动安装的套板和固定板固定结构,利于焊接机器人处于运动状态,避免整体倾斜,降低焊接抖动幅度,提高内置稳定性。
技术研发人员:朱峰,赵光荣
受保护的技术使用者:盐城合信智能装备有限公司
技术研发日:20221228
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!