一种机器人行走轴的制作方法
本技术属于机器人领域,更具体地,涉及一种机器人行走轴。
背景技术:
1、随着自动化进程的不断开展,在工业生产中,机器人的工作占了很大比重。其中常见的物料传送和位置调节的工作都采用机器人进行操作。
2、机器人既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,机器人能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高生产力。
3、为了实现机器人和滑轨协同规划方法。利用机器人和滑轨协同规划方法完成腕臂管材的高精度切割、搬运。综上所述,利用行走轴可以改变轨道长度,适用不同的装配环境下的接触网腕臂智能化预配车间的组装。
4、机器人通常工作范围有限,难以满足长距离物料搬运、多机床上下料、大件物品的装配喷涂等应用场景的需求。为了扩大其工作范围,一种方式是增加机器人本身的结构尺寸,但这种方式需要更大的伺服、减速器和本体,导致成本的迅速攀升,此外,大尺寸机器人精度有所欠缺,灵活度也不够高,难以满足精密应用的要求;另一种方式是把机器人放置在滑轨上,通过附加的滑轨平移扩大机器人的工作范围,这种方式成本相对较低、精度较高,尤其适合长距离物料搬运、多机床上下料等用途,也是目前实际应用较多的方案。
5、现有的机器人配合滑轨使用时,机器人和滑轨大多分开单独控制,也就是机器人由机器人控制器控制,滑轨由plc或类似的运动控制器控制,机器人控制器和滑轨控制器通过数字io信号的方式建立通讯,这种方案的优点是实现简单,对机器人控制器没有特别的要求;缺点是成本高,需要配置滑轨的运动控制器,另外机器人和滑轨不是协同运动,工作节拍低,一些复杂的空间轨迹也无法实现。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本实用新型提供了一种机器人行走轴,其使其能在指定路线上进行移动,扩大机器人的作业半径和使用范围,提高了机器人的工作效率。
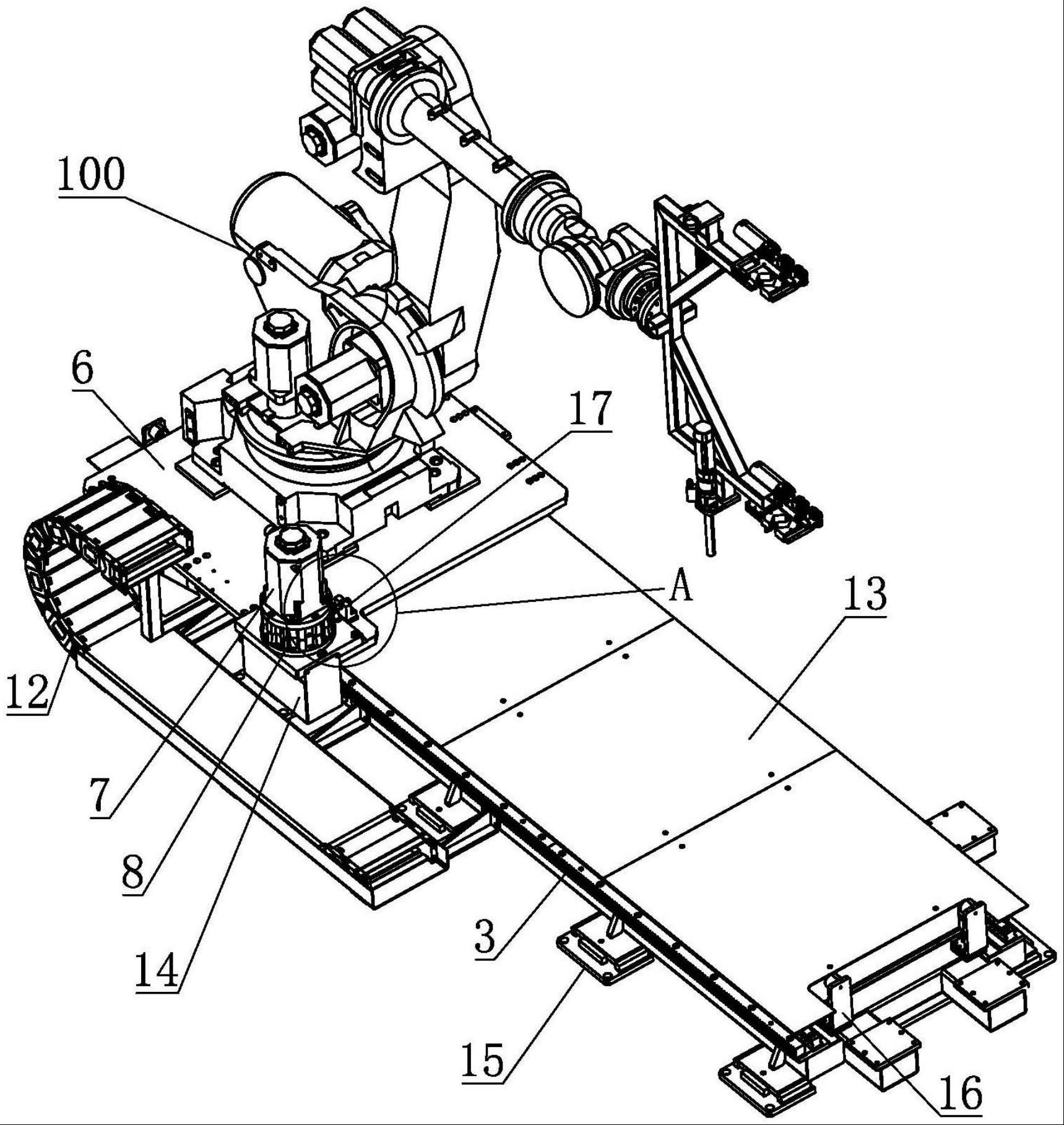
2、为实现上述目的,按照本实用新型的一个方面,提供了一种机器人行走轴,其特征在于,包括框架、滑轨、直齿条、滑块、滑轨连接板、机器人安装座、伺服电机、减速机、齿轮和行程开关,其中:
3、所述滑轨设置有两条并且它们相互平行,每条所述滑轨均水平设置在所述框架上,每条所述滑轨上均设置有多个滑块,每个所述滑块上分别安装一个所述滑轨连接板,并且这些所述滑轨连接板共同承接所述机器人安装座;
4、所述直齿条水平安装在所述框架上,并且所述直齿条与所述滑轨相互平行;
5、所述减速机安装在所述机器人安装座上,并且所述减速机的输入轴连接所述伺服电机的输出轴,所述减速机的输出轴竖直设置并且固定连接所述齿轮,所述齿轮与所述直齿条啮合;
6、所述行程开关安装在所述框架上,以用于限制所述机器人安装座的行程。
7、优选地,所述行程开关设置有两个并且它们沿着所述滑轨的纵向布置。
8、优选地,还包括安装在所述框架上的、用于对机器人安装座进行原点标记的原点刻度标记装置,所述原点刻度标记装置位于这两个所述行程开关之间。
9、优选地,还包括位于所述框架一侧的、用于安装电线的拖链。
10、优选地,所述框架上水平安装有防尘罩,所述防尘罩位于所述滑轨的上方并且位于所述机器人安装座的下方。
11、优选地,所述直齿条安装在所述框架的一侧且该直齿条的齿朝向所述框架的外部,该直齿条与所述防尘罩并排设置并且与所述防尘罩之间存在间隙并且连接所述机器人安装座。
12、优选地,所述滑轨连接板的一部分伸入所述直齿条与所述防尘罩的间隙内。
13、优选地,所述减速机通过减速机连接板安装在所述机器人安装座上,并且所述减速机连接板上设置有用于让第一螺栓穿过的圆通孔,所述机器人安装座上设置有螺纹孔,第一螺栓穿过所述圆通孔后螺纹连接在所述螺纹孔处,从而将所述减速机安装在所述机器人安装座上,所述圆通孔的直径大于所述第一螺栓的外径。
14、优选地,还包括伺服电机调节组件,所述伺服电机调节组件包括第一连接块、第二连接块和第二螺栓,所述第一连接块和第二连接块分别固定安装在机器人安装座和减速机连接板上,所述第二螺栓螺纹连接第一连接块上,并且所述第二螺栓穿过第一连接块后抵接在所述第二连接块上,以调整齿轮与直齿条的间隙。
15、优选地,所述框架的两端分别设置有用于限制所述机器人安装座的行程的限位座。
16、总体而言,通过本实用新型所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
17、1)本实用新型使用伺服电机和减速机驱动齿轮转动,通过齿轮、直齿条的啮合来让机器人安装座在滑轨上移动,具有动力传输效率高、重复定位精度高、响应速度快、运行平稳、可靠等优点。
18、2)本实用新型的机器人安装座通过滑轨连接板和滑块安装在滑轨上,通过滑轨连接板作为滑块的延伸,可以方便地安装机器人安装座及布置机器人安装座的位置,有利于保持结构紧凑。
19、3)本实用新型的行程开关可以保证机器人安装座的安全移动,机器人安装座不会超出行程而损坏机器人。
技术特征:
1.一种机器人行走轴,其特征在于,包括框架(1)、滑轨(2)、直齿条(3)、滑块(4)、滑轨连接板(5)、机器人安装座(6)、伺服电机(7)、减速机(8)、齿轮(9)和行程开关(10),其中:
2.根据权利要求1所述的一种机器人行走轴,其特征在于,所述行程开关(10)设置有两个并且它们沿着所述滑轨的纵向布置。
3.根据权利要求2所述的一种机器人行走轴,其特征在于,还包括安装在所述框架(1)上的、用于对机器人安装座(6)进行原点标记的原点刻度标记装置(11),所述原点刻度标记装置(11)位于这两个所述行程开关(10)之间。
4.根据权利要求1所述的一种机器人行走轴,其特征在于,还包括位于所述框架(1)一侧的、用于安装电线的拖链(12)。
5.根据权利要求1所述的一种机器人行走轴,其特征在于,所述框架(1)上水平安装有防尘罩(13),所述防尘罩(13)位于所述滑轨的上方并且位于所述机器人安装座(6)的下方。
6.根据权利要求5所述的一种机器人行走轴,其特征在于,所述直齿条(3)安装在所述框架(1)的一侧且该直齿条(3)的齿朝向所述框架(1)的外部,该直齿条(3)与所述防尘罩(13)并排设置并且与所述防尘罩(13)之间存在间隙。
7.根据权利要求6所述的一种机器人行走轴,其特征在于,所述滑轨连接板(5)的一部分伸入所述直齿条(3)与所述防尘罩(13)的间隙内并且连接所述机器人安装座(6)。
8.根据权利要求1所述的一种机器人行走轴,其特征在于,所述减速机(8)通过减速机连接板(21)安装在所述机器人安装座(6)上,并且所述减速机连接板(21)上设置有用于让第一螺栓穿过的圆通孔,所述机器人安装座(6)上设置有螺纹孔,第一螺栓穿过所述圆通孔后螺纹连接在所述螺纹孔处,从而将所述减速机(8)安装在所述机器人安装座(6)上,所述圆通孔的直径大于所述第一螺栓的外径。
9.根据权利要求8所述的一种机器人行走轴,其特征在于,还包括伺服电机调节组件(17),所述伺服电机调节组件(17)包括第一连接块(18)、第二连接块(19)和第二螺栓(20),所述第一连接块(18)和第二连接块(19)分别固定安装在机器人安装座(6)和减速机连接板(21)上,所述第二螺栓(20)螺纹连接第一连接块(18)上,并且所述第二螺栓(20)穿过第一连接块(18)后抵接在所述第二连接块(19)上,以调整齿轮(9)与直齿条(3)的间隙。
10.根据权利要求1所述的一种机器人行走轴,其特征在于,所述框架(1)的一端还设置有用于限制所述机器人安装座(6)的行程的限位座(16)。
技术总结
本技术公开了一种机器人行走轴,包括框架、滑轨、直齿条、滑块、滑轨连接板、机器人安装座、伺服电机、减速机、齿轮和行程开关,滑轨设置有两条,每条滑轨上均设置有多个滑块,每个滑块上分别安装一个滑轨连接板,这些滑轨连接板共同承接机器人安装座;减速机固定安装在机器人安装座上,减速机的输入轴连接伺服电机的输出轴,减速机的输出轴固定连接所述齿轮,齿轮与所述直齿条啮合;行程开关安装在所述框架上,以用于限制所述机器人安装座的行程。本技术使用伺服电机和减速机驱动齿轮转动,通过齿轮、直齿条的啮合来让机器人安装座在滑轨上移动,具有动力传输效率高、重复定位精度高、响应速度快、运行平稳、可靠等优点。
技术研发人员:万传建,蒋海,程长智,马林林,何利江
受保护的技术使用者:中铁十一局集团电务工程有限公司
技术研发日:20221226
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!