风电减速器装配用机械臂的制作方法
本技术涉及风电减速器,尤其涉及一种风电减速器装配用机械臂。
背景技术:
1、目前,在风电减速器装配过程中,零组件的组装都是手工进行的,需要把零组件从生产线边一件一件手工(或借助于电葫芦辅助手工)搬运到需要装配的区域。
2、现有技术中通过人工搬运零组件费时费力,对于质量重的零组件在搬运过程中一旦滑落,很容易对搬运工人造成伤害,引发生产事故;而且,对于需要每天组装大量风电减速器的生产现状,随着工作时间的推移,工人的体能逐渐下降,进一步地影响了生产效率。
3、因此,如何提供一种风电减速器装配用机械臂,能够通过机械臂实现自动控制,从而达到提升效率、降低劳动强度的目的,已成为本领域技术人员亟需解决的技术问题。
技术实现思路
1、本实用新型的目的在于提供一种风电减速器装配用机械臂,用于解决现有技术中人工搬运零组件容易引发工伤事故以及随着工人体能下降影响生产效率的技术问题,其实现了自动抓取零组件的功能,达到了机器替代人工组装搬运零组件的目的,从而提高了生产效率和安全保障。
2、为达到上述目的,本实用新型采用如下技术方案:
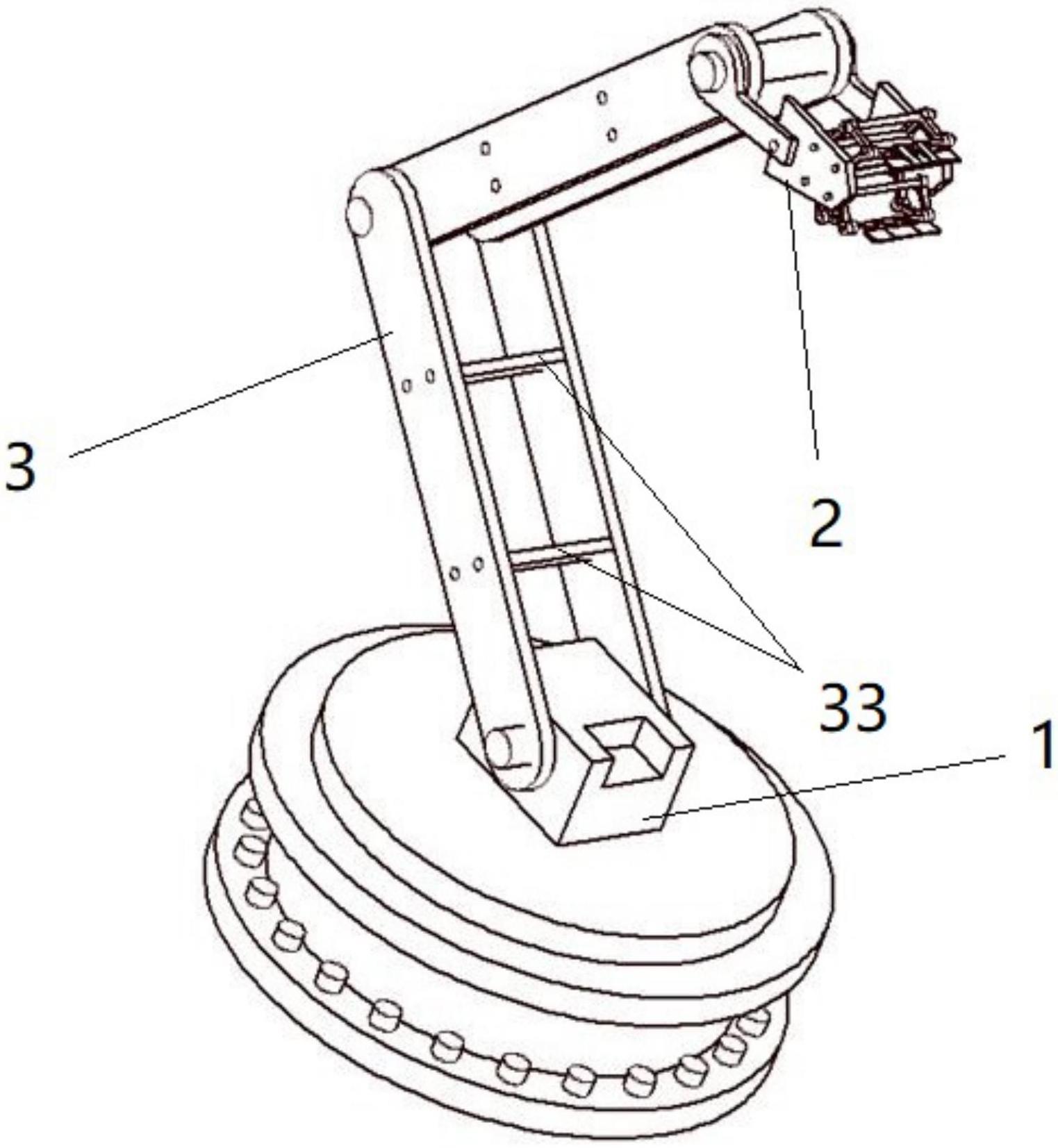
3、一种风电减速器装配用机械臂,包括:固定机构,以及与所述固定机构连接的主控装置和机械臂夹取机构;所述固定机构用于固定所述机械臂夹取机构及放置主控装置,所述主控装置用于控制机械臂移动,所述机械臂夹取机构用于零组件的拾捡;
4、所述固定机构采用方形底座并通过固定螺栓与所述机械臂连接,所述固定机构固定于风电减速器装配区一端的顶面处,为所述机械臂、所述主控装置及所述机械臂夹取机构提供支撑平台;所述主控装置通过arm板以及线路控制所述机械臂和所述机械臂夹取机构;所述机械臂夹取机构通过控制钳口夹取装置,以将零组件由放置零组件的物料仓夹取并放置于需要装配的位置。
5、其中,所述钳口夹取装置包括:钳头支架,以及与所述钳头支架轴向连接的钳夹。
6、具体地,所述机械臂包括:与所述方形底座连接的第一臂体,以及与所述第一臂体通过转轴连接的第二臂体。
7、进一步地,所述第一臂体和所述第二臂体均采用镂空结构并设置有加强筋。
8、更进一步地,所述第一臂体与所述方形底座通过第一转轴连接,所述第二臂体与所述机械臂夹取机构通过第二转轴连接。
9、相对于现有技术,本实用新型所述的风电减速器装配用机械臂具有以下优势:
10、本实用新型提供的风电减速器装配用机械臂中,由固定机构上的机械臂通过主控装制控制机械臂夹取机构将零组件从物料仓夹取并放至需要装配的区域,结构巧妙,使用方便,降低了劳动量,提高了工作的效率,同时采用本装置来拾捡、运输零组件安全系数更高,避免了生产事故的发生。
技术特征:
1.一种风电减速器装配用机械臂,其特征在于,包括:固定机构,以及与所述固定机构连接的主控装置和机械臂夹取机构;所述固定机构用于固定所述机械臂夹取机构及放置主控装置,所述主控装置用于控制机械臂移动,所述机械臂夹取机构用于零组件的拾捡;
2.根据权利要求1所述的风电减速器装配用机械臂,其特征在于,所述钳口夹取装置包括:钳头支架,以及与所述钳头支架轴向连接的钳夹。
3.根据权利要求1所述的风电减速器装配用机械臂,其特征在于,所述机械臂包括:与所述方形底座连接的第一臂体,以及与所述第一臂体通过转轴连接的第二臂体。
4.根据权利要求3所述的风电减速器装配用机械臂,其特征在于,所述第一臂体和所述第二臂体均采用镂空结构并设置有加强筋。
5.根据权利要求3所述的风电减速器装配用机械臂,其特征在于,所述第一臂体与所述方形底座通过第一转轴连接,所述第二臂体与所述机械臂夹取机构通过第二转轴连接。
技术总结
一种风电减速器装配用机械臂,涉及风电减速器技术领域,用于解决现有技术中人工搬运零组件容易引发工伤事故以及随着工人体能下降影响生产效率的技术问题。所述风电减速器装配用机械臂中,固定机构用于固定机械臂夹取机构及放置主控装置,主控装置用于控制机械臂移动,机械臂夹取机构用于零组件的拾捡;固定机构采用方形底座并通过固定螺栓与机械臂连接,固定机构固定于风电减速器装配区一端的顶面处,为机械臂、主控装置及机械臂夹取机构提供支撑平台;主控装置通过arm板以及线路控制机械臂和机械臂夹取机构;机械臂夹取机构通过控制钳口夹取装置,以将零组件由放置零组件的物料仓夹取并放置于需要装配的位置。
技术研发人员:周海帆,席龙,常翔,冯世有,郑明,田广泽,李想
受保护的技术使用者:银川威力传动技术股份有限公司
技术研发日:20221229
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!