对接机器人的制作方法
本申请涉及机器人,尤其涉及一种对接机器人。
背景技术:
1、随着技术的不断进步,越来越多的工作场景可以由机器人替代人工作业,以搬运或换料等为例,机器人已经逐步取代了人力,节省了大量的劳动力,且可以不间断作业,提升工作效率,智能化水平也逐步提升。
2、对接机器人中通常设置有三轴提升机构,以使待转运物料可以相对机台在三维空间内运动,调节待转运物料的位置。但是,受三轴提升机构的结构设计的限制,目前的对接机器人在竖直方向上的举升能力有限,适应性相对较低。
技术实现思路
1、本申请公开一种对接机器人,以解决目前的对接机器人在竖直方向上的举升能力有限,适应性相对较低的问题。
2、为了解决上述问题,本申请采用下述技术方案:
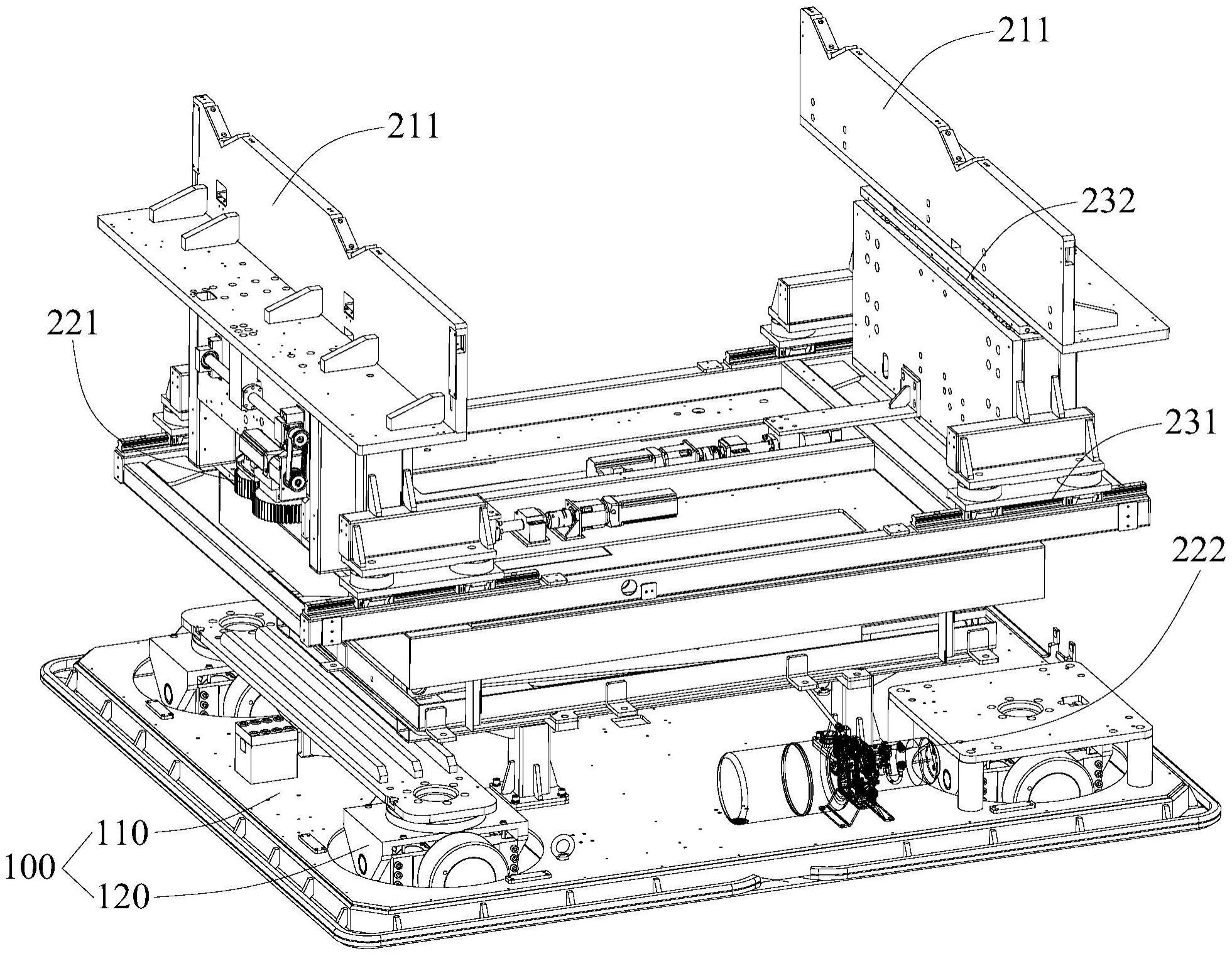
3、本申请公开一种对接机器人,其包括动力底盘、承载架、第一竖直调节机构、第二竖直调节机构、第一水平调节机构和第二水平调节机构;
4、所述承载架用以承载待转运物料,且所述承载架安装于所述第二水平调节机构,所述第二水平调节机构安装于所述第一竖直调节机构,所述第一竖直调节机构安装于所述第一水平调节机构,所述第一水平调节机构安装于所述第二竖直调节机构,所述第二竖直调节机构安装于所述动力底盘,所述第一竖直调节机构和所述第二竖直调节机构的位置调节方向平行设置,所述第一水平调节机构和所述第二水平调节机构的位置调节方向非平行设置,且均垂直于所述第一竖直调节机构和所述第二竖直调节机构的位置调节方向。
5、可选地,所述第二竖直调节机构包括油泵和液压举升件,所述油泵安装于所述动力底盘,所述液压举升件与所述油泵连接,且所述第一水平调节机构安装于所述液压举升件。
6、可选地,第一竖直调节机构的数量为两个,所述承载架包括相互间隔的第一承载块和第二承载块,所述第一承载块和所述第二承载块一并用以承载待转运物料,且所述第一承载块和所述第二承载块与两个第一竖直调节机构一一对应设置。
7、可选地,所述第一水平调节机构和所述第二水平调节机构的数量均为两个,两个所述第二水平调节机构一一对应地安装在两个第一竖直调节机构,且两个第一竖直调节机构一一对应地安装在两个第一水平调节机构上。
8、可选地,所述承载架包括至少两个相互间隔的承载块,各所述承载块均设有相互间隔的第一v型槽和第二v型槽,所述第一v型槽和所述第二v型槽的正下方均对应设置有定位相机。
9、可选地,所述第一竖直调节机构包括驱动件、导轨和滑块,所述驱动件用以驱动所述承载架沿竖直方向移动,所述滑块安装于第一水平调节机构,所述滑块滑动安装于所述导轨,且所述承载架安装于所述导轨。
10、可选地,所述驱动件包括旋转电机,所述第一竖直调节机构还包括转动传动机构和直线传动机构,所述转动传动机构包括相互啮合的第一齿轮和第二齿轮,所述直线传动机构包括丝杠和丝杠螺母,所述丝杠螺母螺旋安装于所述丝杠,且所述丝杠螺母与所述承载架固定连接,所述第一齿轮安装于所述旋转电机,所述第二齿轮安装于所述丝杠。
11、可选地,所述第一水平调节机构的结构与所述第一竖直调节机构的结构相同。
12、可选地,所述第二水平调节机构包括驱动件、导轨和滑块,所述驱动件用以驱动所述承载架沿水平方向移动,所述导轨安装于所述第一竖直调节机构,所述滑块滑动安装于所述导轨,且所述承载架安装于所述滑块。
13、可选地,所述驱动件包括旋转电机,所述第二水平调节机构还包括转动传动机构和直线传动机构,所述转动传动机构包括第一同步齿轮、第二同步齿轮和同步带,所述直线传动机构包括丝杠和丝杠螺母,所述丝杠螺母螺旋安装于所述丝杠,且所述丝杠螺母与所述承载架固定连接,所述第一同步齿轮安装于所述旋转电机,所述第二同步齿轮安装于所述丝杠,所述第一同步齿轮和所述第二同步齿轮通过所述同步带传动连接。
14、本申请采用的技术方案能够达到以下有益效果:
15、本申请实施例公开一种对接机器人,其包括用以承载待转运物料的承载架,且承载架安装在第二水平调节机构上,第二水平调节机构上安装在第一竖直调节机构上,第一竖直调节机构安装在第一水平调节机构上,通过使第一水平调节机构和第二水平调节机构的位置调节方向均垂直于第一竖直调节机构和第二竖直调节机构的位置调节方向,且使第一水平调节机构和第二水平调节机构的位置调节方向非平行设置,可以在第一水平调节机构和第二水平调节机构的作用下,实现对承载架在垂直于竖直方向的水平面内的位置进行调节的目的,且在第一竖直调节机构的作用下,可以对承载架的竖直位置进行调节,实现在三维空间内调节承载架的位置的目的。
16、并且,由于承载架还间接地通过第二竖直调节机构与动力底盘连接,使得第一竖直调节机构和第二竖直调节机构均可以用以调节承载架在竖直方向上的位置,从而提升承载架在竖直方向上的位置的调节范围,进而扩大对接机器人的适用范围。
技术特征:
1.一种对接机器人,其特征在于,包括动力底盘、承载架、第一竖直调节机构、第二竖直调节机构、第一水平调节机构和第二水平调节机构;
2.根据权利要求1所述的对接机器人,其特征在于,所述第二竖直调节机构包括油泵和液压举升件,所述油泵安装于所述动力底盘,所述液压举升件与所述油泵连接,且所述第一水平调节机构安装于所述液压举升件。
3.根据权利要求1所述的对接机器人,其特征在于,第一竖直调节机构的数量为两个,所述承载架包括相互间隔的第一承载块和第二承载块,所述第一承载块和所述第二承载块一并用以承载待转运物料,且所述第一承载块和所述第二承载块与两个第一竖直调节机构一一对应设置。
4.根据权利要求3所述的对接机器人,其特征在于,所述第一水平调节机构和所述第二水平调节机构的数量均为两个,两个所述第二水平调节机构一一对应地安装在两个第一竖直调节机构,且两个第一竖直调节机构一一对应地安装在两个第一水平调节机构上。
5.根据权利要求1所述的对接机器人,其特征在于,所述承载架包括至少两个相互间隔的承载块,各所述承载块均设有相互间隔的第一v型槽和第二v型槽,所述第一v型槽和所述第二v型槽的正下方均对应设置有定位相机。
6.根据权利要求1所述的对接机器人,其特征在于,所述第一竖直调节机构包括驱动件、导轨和滑块,所述驱动件用以驱动所述承载架沿竖直方向移动,所述滑块安装于第一水平调节机构,所述滑块滑动安装于所述导轨,且所述承载架安装于所述导轨。
7.根据权利要求6所述的对接机器人,其特征在于,所述驱动件包括旋转电机,所述第一竖直调节机构还包括转动传动机构和直线传动机构,所述转动传动机构包括相互啮合的第一齿轮和第二齿轮,所述直线传动机构包括丝杠和丝杠螺母,所述丝杠螺母螺旋安装于所述丝杠,且所述丝杠螺母与所述承载架固定连接,所述第一齿轮安装于所述旋转电机,所述第二齿轮安装于所述丝杠。
8.根据权利要求7所述的对接机器人,其特征在于,所述第一水平调节机构的结构与所述第一竖直调节机构的结构相同。
9.根据权利要求2所述的对接机器人,其特征在于,所述第二水平调节机构包括驱动件、导轨和滑块,所述驱动件用以驱动所述承载架沿水平方向移动,所述导轨安装于所述第一竖直调节机构,所述滑块滑动安装于所述导轨,且所述承载架安装于所述滑块。
10.根据权利要求9所述的对接机器人,其特征在于,所述驱动件包括旋转电机,所述第二水平调节机构还包括转动传动机构和直线传动机构,所述转动传动机构包括第一同步齿轮、第二同步齿轮和同步带,所述直线传动机构包括丝杠和丝杠螺母,所述丝杠螺母螺旋安装于所述丝杠,且所述丝杠螺母与所述承载架固定连接,所述第一同步齿轮安装于所述旋转电机,所述第二同步齿轮安装于所述丝杠,所述第一同步齿轮和所述第二同步齿轮通过所述同步带传动连接。
技术总结
本申请公开一种对接机器人,其承载架用以承载待转运物料,且承载架安装于第二水平调节机构,第二水平调节机构安装于第一竖直调节机构,第一竖直调节机构安装于第一水平调节机构,第一水平调节机构安装于第二竖直调节机构,第二竖直调节机构安装于动力底盘,第一竖直调节机构和第二竖直调节机构的位置调节方向平行设置,第一水平调节机构和第二水平调节机构的位置调节方向非平行设置,且均垂直于第一竖直调节机构和第二竖直调节机构的位置调节方向。上述对接机器人可以解决目前的对接机器人在竖直方向上的举升能力有限,适应性相对较低的问题。
技术研发人员:吕王彪,白寒
受保护的技术使用者:杭州海康机器人股份有限公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!