计算作用于机器人装置或工件的外力的容许值的计算装置以及机器人的控制装置的制作方法
本发明涉及计算作用于机器人装置或工件的外力的容许值的计算装置以及机器人的控制装置。
背景技术:
1、在现有技术中,已知将把持工件的机械手安装于机器人,并通过使机器人的位置以及姿势变化,而将工件搬运至规定的位置的机器人装置。作为在移动工件时精密地调整工件的位置以及姿势的作业,已知有使一个工件与其他工件接触或嵌合的作业。
2、已知机器人装置为了精密地调整工件的位置以及姿势而在机器人安装力传感器。能够根据在一个工件与其他工件接触时从力传感器输出的力来调整机器人的位置以及姿势。例如,已知根据作用于两个工件彼此的力来驱动机器人,以便成为一个工件的表面与另一个工件的表面相合的状态(例如,日本特开2017-19039号公报)。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2017-19039号公报
技术实现思路
1、发明要解决的课题
2、通过在机器人安装力传感器,能够检测作用于设定在机器人装置或工件的作用点的外力。作业者能够在动作程序中设定通过机器人驱动而作用于作用点的规定方向上的外力的目标值。机器人的控制装置能够驱动机器人,使得作用于作用点的外力成为目标值。
3、在外力作用于机器人装置或工件的情况下,对臂、马达以及传感器等构成机器人的结构部件施加负荷。例如,对结构部件施加弯曲的力,或对转动轴施加转矩。若施加于各个结构部件的负荷超过负荷的容许值,则存在结构部件破损、或机器人无法正常驱动的担忧。因此,优选控制机器人,以使施加于各个结构部件的负荷为容许值以下。
4、在现有的技术中,能够将作用于作用点的外力的目标值设定得低,以使得机器人装置不产生异常。例如,针对各个结构部件,计算能够作用于作用点的外力的大小。在各种机器人的位置以及姿势中,可以将能够作用于作用点的外力中的最小的值确定为外力的容许值。并且,外力的目标值能够设定外力的容许值以下的值。这样,在作用于作用点的外力为最小的条件(最差的条件)下设定外力的容许值。
5、这样的外力的容许值的范围例如记载于操作手册。并且,作业者根据容许值的范围来设定目标值。因此,在规定的机器人的位置以及姿势中,即使在能够使较大的外力作用于作用点的情况下,也以较小的外力的目标值来驱动机器人。其结果是,存在机器人装置的作业时间变长的情况。
6、另外,机器人的控制装置以在作用于作用点的外力超过容许值的状态下不驱动机器人的方式实施控制。例如,控制装置在成为超过外力的容许值那样的机器人的驱动状态的情况下,发出警告,进行停止机器人的控制。然而,在该控制中,需要在机器人装置停止后用于恢复的作业。其结果是,周期时间变长,存在生产率变差这样的问题。
7、用于解决课题的手段
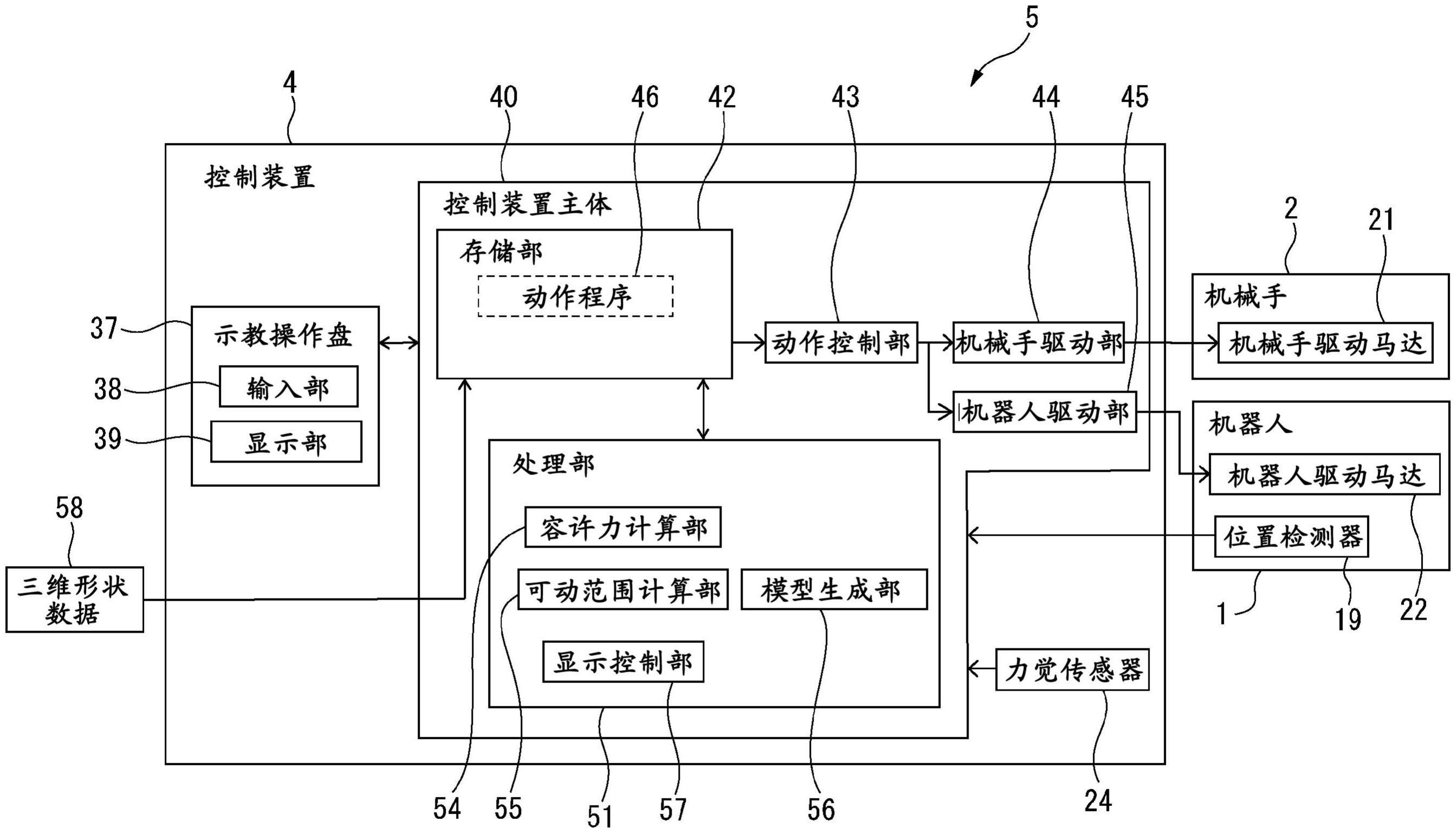
8、本公开的方式的计算装置具有:处理部,其对容许作用于机器人、工件或作业工具的外力的容许值进行计算。能够施加于机器人的结构部件的负荷的容许值被预先确定。处理部根据机器人的位置以及姿势、外力所作用的作用点的位置、机器人的结构部件的负荷的容许值,计算外力所作用的作用方向上的外力的容许值。
9、本公开的方式的机器人的控制装置具有所述的计算装置和控制机器人的动作的动作控制部。
10、发明效果
11、根据本公开的方式,能够提供对作用于机器人装置或工件的外力的容许值进行计算的计算装置以及机器人的控制装置。
技术特征:
1.一种计算装置,其特征在于,
2.根据权利要求1所述的计算装置,其特征在于,
3.根据权利要求1所述的计算装置,其特征在于,
4.根据权利要求2或3所述的计算装置,其特征在于,
5.一种机器人的控制装置,其特征在于,具有:
6.根据权利要求5所述的机器人的控制装置,其特征在于,
7.根据权利要求5所述的机器人的控制装置,其特征在于,
8.根据权利要求7所述的机器人的控制装置,其特征在于,
9.根据权利要求5~8中任一项所述的机器人的控制装置,其特征在于,
技术总结
控制装置具有对容许作用于机器人、工件或者机械手的外力的容许值进行计算的处理部。能够施加于机器人的结构部件的负荷的容许值被预先确定。处理部根据机器人的位置以及姿势、外力所作用的作用点的位置、和机器人的结构部件的负荷的容许值,计算外力所作用的作用方向上的外力的容许值。
技术研发人员:石井优希
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!