操作终端、机器人系统以及计算机程序的制作方法
本公开涉及操作终端、机器人系统以及计算机程序。
背景技术:
1、例如,日本专利第6619398号公报公开了能够进行机器人的示教用的操作的机械操作盘。机械操作盘具备平板终端、和与平板终端连接的外部设备。外部设备与机器人的控制装置连接。平板终端经由外部设备来与控制装置通信。
技术实现思路
1、日本专利第6619398号公报的机械操作盘中的示教操作限定于受过示教的教育的操作者。本公开提供一种使由各种操作者对机器人的特定动作的操作成为可能的操作终端、机器人系统以及计算机程序。
2、本公开的一个形态所涉及的操作终端是操作可移动的机器人的操作终端,执行:受理移动操作的输入,上述移动操作是使上述机器人所具备的移动装置动作的操作;和向控制上述机器人的动作的控制器输出使上述移动装置执行根据已受理的上述移动操作而进行的动作的指令。
技术特征:
1.一种操作终端,是操作可移动的机器人的操作终端,其特征在于,执行:
2.根据权利要求1所述的操作终端,其特征在于,
3.根据权利要求2所述的操作终端,其特征在于,
4.根据权利要求1~3中的任一项所述的操作终端,其特征在于,
5.根据权利要求1~4中的任一项所述的操作终端,其特征在于,
6.根据权利要求1~5中的任一项所述的操作终端,其特征在于,
7.根据权利要求1~6中的任一项所述的操作终端,其特征在于,
8.根据权利要求1~7中的任一项所述的操作终端,其特征在于,
9.根据权利要求1~8中的任一项所述的操作终端,其特征在于,
10.一种机器人系统,其特征在于,包括:
11.根据权利要求10所述的机器人系统,其特征在于,
12.一种计算机程序,是使权利要求1~9中的任一项所述的操作终端动作的计算机程序,其特征在于,使所述操作终端执行:
13.根据权利要求12所述的计算机程序,其特征在于,
技术总结
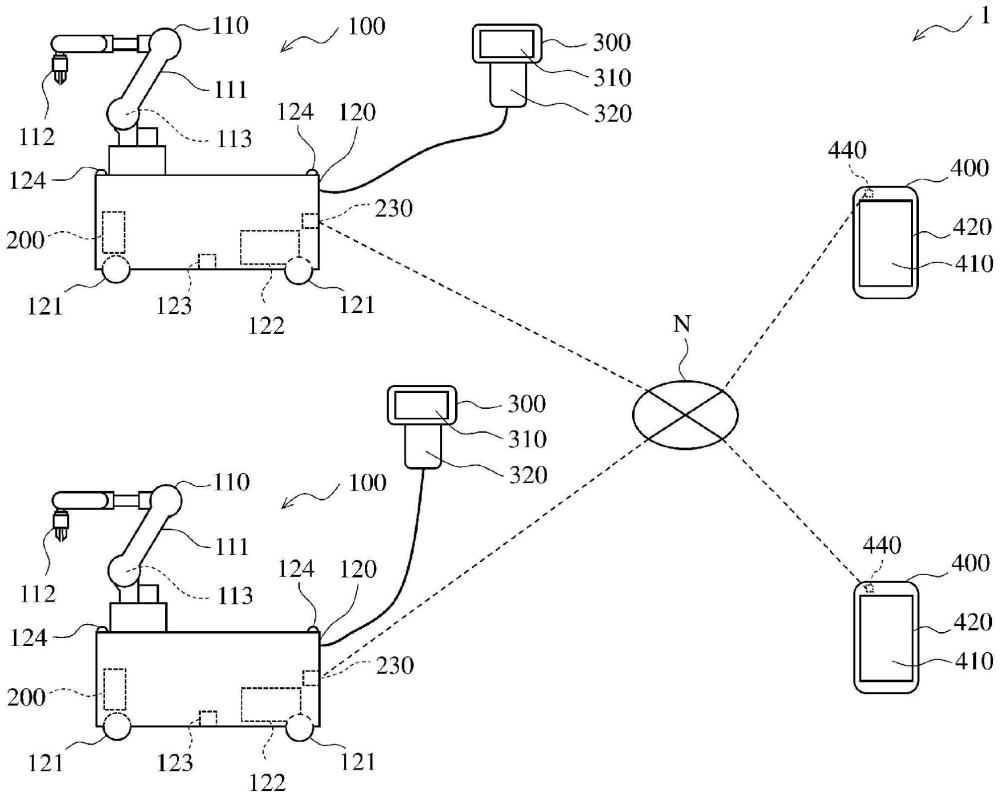
操作可移动的机器人(100)的操作终端(400)执行:受理移动操作的输入,上述移动操作是使上述机器人所具备的移动装置(120)动作的操作;和向控制上述机器人的动作的控制器(200)输出使上述移动装置执行根据已受理的上述移动操作而进行的动作的指令。
技术研发人员:长广一平,伊地知哲,松井宏树,酒井领太,百田里纱
受保护的技术使用者:川崎重工业株式会社
技术研发日:
技术公布日:2024/3/31
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1