一种低熔点合金变刚度温度控制方法及结构和软体机械手
本发明涉及软体机器人,更具体的说是涉及一种低熔点合金变刚度温度控制方法及结构和软体机械手。
背景技术:
1、软材料使软体机器人拥有高度的柔顺性、灵活性和安全性,但同时也大幅削弱了软体机器人的刚度,由此产生了低负载、低输出力和低稳定性等问题。因此,如何调节软体机器人的刚度,使其可以实现刚柔转换提升机器人的性能,从而能够承担更多的任务,是软体机器人研究的一个重要领域。
2、现有的软体人变刚度方式以干扰、拮抗、智能材料、相变等为主。干扰是目前应用较广的一种变刚度方式,通过抽取负压的方式将颗粒、层、线等材料挤压在一起提高摩擦力,实现整体的刚度提升,如本申请人已经申请过的公开号为cn109249385a、cn111055299a和cn111941462a等发明专利,但是此种方式仍然存在刚度调节范围小,可调刚度低的问题。拮抗是通过结构的特殊布置,利用软体机器人中不同运动的拮抗作用实现的刚度调节,其所占体积较大,是应用较少的一种变刚度方式。智能材料通常是利用电场或者磁场激活后,能够实现从游离或者松散状态变为按规律排列或者紧绷状态的一种刚度调节方式,对于外部条件要求较高。相变是一种利用材料吸热放热实现固相和液相之间的转换实现刚度变换的变刚度方式,其中相变低熔点合金具有最高的刚度调节能力,但是存在相变过程时间长,刚度无法自由调节的问题。
3、因此,如果能够通过某一种方式缩短相变所需时间和解决刚度只能在液相低刚度和固相高刚度之间转换的问题,那么低熔点合金能够有效地解决机器人刚度问题,为推进软体机器人的研究与应用具有重大的意义。
技术实现思路
1、有鉴于此,本发明提供了一种低熔点合金变刚度温度控制方法及结构和软体机械手,旨在解决上述技术问题。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种低熔点合金变刚度温度控制方法,将低熔点合金温度控制在其熔点温度±0.5℃范围内,通过加热或者冷却使低熔点合金吸收或释放相变潜热所需能量,以实现低熔点合金的快速融化和凝固。
4、通过上述技术方案,本发明在需要改变合金状态时,只需要降低合金冷却的效率使合金吸收一级相变所需的潜热,从固相转变为液相;或提高合金外围冷却装置的效率,将合金内部相当于一级相变潜热的热量通过冷却装置释放,从液相转变为固相。整个相变过程的温度和气压保持不变,发生相变的过程中只有热量的吸收或释放,提高加热效率和冷却效率可以有效降低反应时间。
5、优选的,在上述一种低熔点合金变刚度温度控制方法中,通过调节低熔点合金加热提供热量和水冷却带走的热量,控制低熔点合金在达到熔点后吸收或释放的潜热的热量,从而实现对低熔点合金在潜热阶段固相和液相的比例控制。合金的固液比例在不断降低或升高,随着合金固相比例的下降,合金的刚度不断降低,因此通过调节合金加热提供热量和水冷却带走的热量,控制合金在达到熔点后吸收或释放的热量,从而实现对合金在潜热阶段固相和液相的比例控制,以实现刚度的无极调控。
6、本发明还提供了一种低熔点合金变刚度温度控制结构,包括气动软体驱动器,和与所述气动软体驱动器内/外表面贴合固定的变刚度层,所述变刚度层内封装有低熔点合金,所述低熔点合金通过上述的一种低熔点合金变刚度温度控制方法实现快速融化和凝固。
7、通过上述技术方案,本发明针对软体机械结构主流的干扰变刚度方式刚度小与低熔点合金变刚度方式反应慢的特点,提出了一种基于热量控制的低熔点合金变刚度温度控制结构,该种控制结构基于共晶低熔点合金相变过程需要在达到熔点后需要吸收或释放潜热的特点,通过控制供热量和耗热量,将合金的温度维持在低于熔点(固相)或高于熔点(液相)0.5摄氏度,此时合金只需在吸收或者释放潜热和使合金升高或降低一度的热量即可完成相变。基于热量控制低熔点合金相变,在潜热阶段还可以使合金的固相和液相比例保持不变,从而实现现有方法无法实现的无级刚度调节。
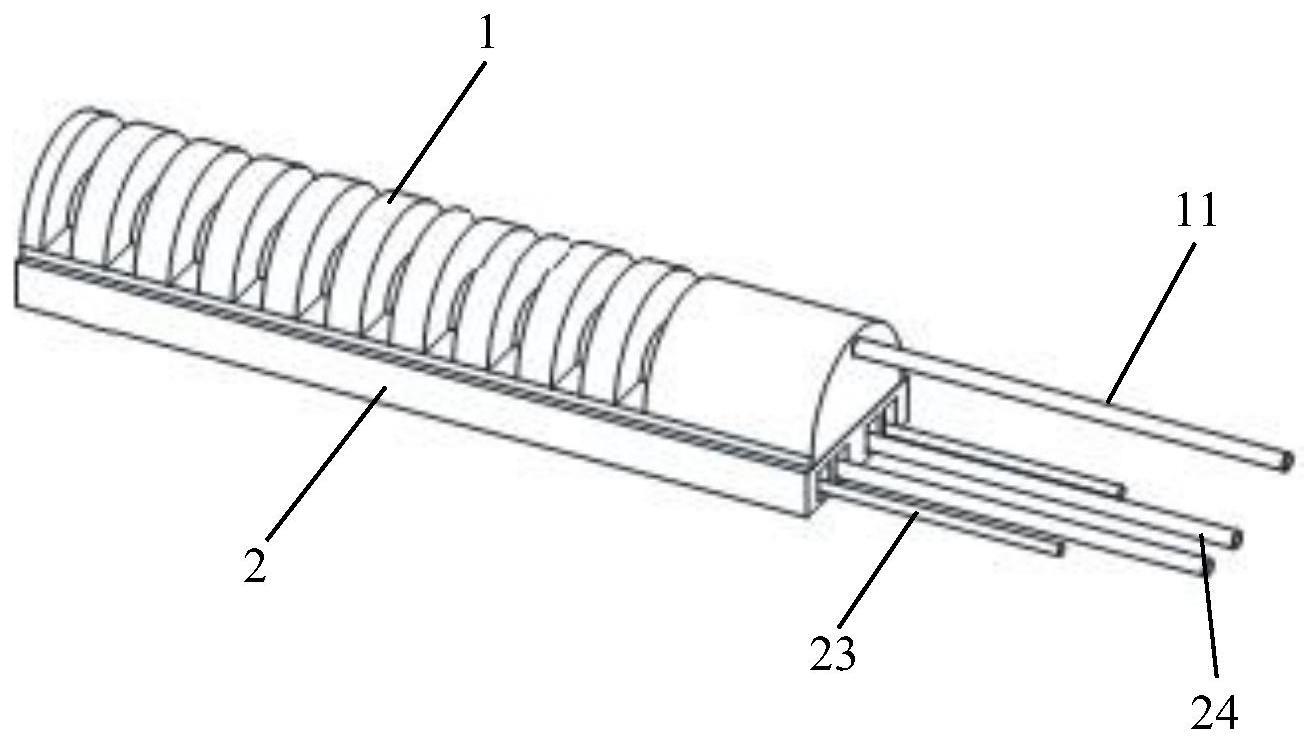
8、优选的,在上述一种低熔点合金变刚度温度控制结构中,所述气动软体驱动器为封闭的二分之一波纹膨胀管结构,所述气动软体驱动器一端具有与其内腔连通的气管。当通过气管充气或抽气时能够使得二分之一波纹膨胀管结构发生弯曲和伸直动作。
9、优选的,在上述一种低熔点合金变刚度温度控制结构中,所述变刚度层包括硅胶包裹层,所述硅胶包裹层与所述气动软体驱动器内/外表面贴合固定,所述硅胶包裹层内部形成有两个冂型腔室,外侧的所述冂型腔室内封装有低熔点合金与加热丝,内侧的所述冂型腔室内设有冷却水流动管道。低熔点合金与加热丝封装在同一个冂型腔室内,冷却水流动管道单独一个冂型腔室,硅胶包裹层将所有结构包裹在一起。
10、优选的,在上述一种低熔点合金变刚度温度控制结构中,所述低熔点合金加热方式为焦耳加热,利用铜丝、碳纤维丝等作为加热体,通过调节电压保持加热功率稳定;所述低熔点合金冷却方式为水对流冷却方式,通过控制水流速和冷却水温度,控制水冷效率。合金整体加热功率(供热量)保持不变,改变冷却(耗热量)效率来控制合金内的整体热量。
11、优选的,在上述一种低熔点合金变刚度温度控制结构中,通过调整低熔点合金加热的功率和所述冷却水流动管道内冷却液体的温度和流速,控制低熔点合金的温度和内部热量与相变的发生;通过调整热量的供给和损失,控制低熔点合金的固液比例,从而表现出不同的刚度。
12、本发明还提供了一种软体机械手,包括安装架,和连接在所述安装架上的多个上述的低熔点合金变刚度温度控制结构。
13、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种低熔点合金变刚度温度控制方法及结构和软体机械手,具有以下有益效果:
14、1、本发明区别于现有低熔点合金的变刚度方式,利用共晶合金熔化过程中抵达熔点时,还需要吸收一定热量才能完全熔化的特点,将合金温度维持在略低于或刚好抵达熔点温度的状态,只需要再加热一段时间就能使合金熔化,同理可以实现快速冷却凝固,能够大大降低低熔点合金的相变所需时间。
15、2、本发明区别于现有低熔点合金变刚度方式,利用共晶合金熔化或凝固时抵达熔点,还需要吸收或释放一定热量才能发生熔化或凝固的特点,将合金温度维持在熔点温度,控制合金吸收或者释放的热量,实现对刚度的无级调控。
16、3、本发明区别于现有变刚度夹爪,低熔点合金的变刚度方式不仅有效地实现较高的刚度调节,而且集成在内部的合金在液态时对夹爪的运动影响远小于颗粒、层线等干扰变刚度方式。
17、4、本发明变刚度方式适用于所有需要刚度调节提升性能的软体机器人,尤其是需要实现负载操作的软体机械臂和具有较大工作空间的软连续体机器人。
技术特征:
1.一种低熔点合金变刚度温度控制方法,其特征在于,将低熔点合金温度控制在其熔点温度±0.5℃范围内,通过加热或者冷却使低熔点合金吸收或释放相变潜热所需能量,以实现低熔点合金的快速融化和凝固。
2.根据权利要求1所述的一种低熔点合金变刚度温度控制方法,其特征在于,通过调节低熔点合金加热提供热量和水冷却带走的热量,控制低熔点合金在达到熔点后吸收或释放的潜热的热量,从而实现对低熔点合金在潜热阶段固相和液相的比例控制。
3.一种低熔点合金变刚度温度控制结构,其特征在于,包括气动软体驱动器(1),和与所述气动软体驱动器(1)内/外表面贴合固定的变刚度层(2),所述变刚度层(2)内封装有低熔点合金,所述低熔点合金通过权利要求1或2所述的一种低熔点合金变刚度温度控制方法实现快速融化和凝固。
4.根据权利要求3所述的一种低熔点合金变刚度温度控制结构,其特征在于,所述气动软体驱动器(1)为封闭的二分之一波纹膨胀管结构,所述气动软体驱动器(1)一端具有与其内腔连通的气管(11)。
5.根据权利要求3所述的一种低熔点合金变刚度温度控制结构,其特征在于,所述变刚度层(2)包括硅胶包裹层(21),所述硅胶包裹层(21)与所述气动软体驱动器(1)内/外表面贴合固定,所述硅胶包裹层(21)内部形成有两个冂型腔室(22),外侧的所述冂型腔室(22)内封装有低熔点合金与加热丝(23),内侧的所述冂型腔室(22)内设有冷却水流动管道(24)。
6.根据权利要求5所述的一种低熔点合金变刚度温度控制结构,其特征在于,所述低熔点合金加热方式为焦耳加热;所述低熔点合金冷却方式为水对流冷却方式。
7.根据权利要求6所述的一种低熔点合金变刚度温度控制结构,其特征在于,通过调整低熔点合金加热的功率和所述冷却水流动管道(24)内冷却液体的温度和流速,控制低熔点合金的温度和内部热量与相变的发生;通过调整热量的供给和损失,控制低熔点合金的固液比例,从而表现出不同的刚度。
8.一种软体机械手,其特征在于,包括安装架(3),和连接在所述安装架(3)上的多个权利要求3-5中任一项所述的低熔点合金变刚度温度控制结构。
9.根据权利要求6所述的一种软体机械手,其特征在于,多个所述低熔点合金变刚度温度控制结构环状均匀布置在所述安装架(3)的外侧。
技术总结
本发明公开了一种低熔点合金变刚度温度控制方法及结构和软体机械手,包括安装架和连接在安装架上的多个低熔点合金变刚度温度控制结构;低熔点合金变刚度温度控制结构包括气动软体驱动器,和与气动软体驱动器内/外表面贴合固定的变刚度层,变刚度层内封装有低熔点合金;将低熔点合金温度控制在其熔点温度±0.5℃范围内,通过加热或者冷却使低熔点合金吸收或释放相变潜热所需能量,以实现低熔点合金的快速融化和凝固。本发明针对软体机械结构主流的干扰变刚度方式刚度小与低熔点合金变刚度方式反应慢的缺陷,合金只需在吸收或者释放潜热和使合金升高或降低一度的热量即可完成相变,实现现有方法无法实现的无级刚度调节。
技术研发人员:胡俊峰,蔡铭炜,温涛
受保护的技术使用者:江西理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!