搬运装置的制作方法
本公开涉及搬运物体的搬运装置。
背景技术:
1、开发了用于搬运物体的各种装置。例如,日本特开平11-029207号公报公开了一种货物移载装置,所述货物移载装置通过使设置在从载置台伸出或缩回的轴的前端的钩部与设置在集装箱的卡合部卡合,从而使集装箱在搁板与载置台之间移动。该货物移载装置以使钩部位于集装箱的卡合部的下侧的方式使轴伸出,之后,使轴旋转而将钩部立起,由此,将钩部钩挂于卡合部。
2、在日本特开平11-029207号公报公开的技术中,由于需要进行用于使钩部的位置与卡合部的位置相匹配的准确的控制,因此,无法容易地将钩部与卡合部卡合。
技术实现思路
1、本公开是以上述情形为背景而做出的,其目的在于提供无需进行用于使臂与物体卡合的准确的对位的控制就能够容易地使物体移动的搬运装置。
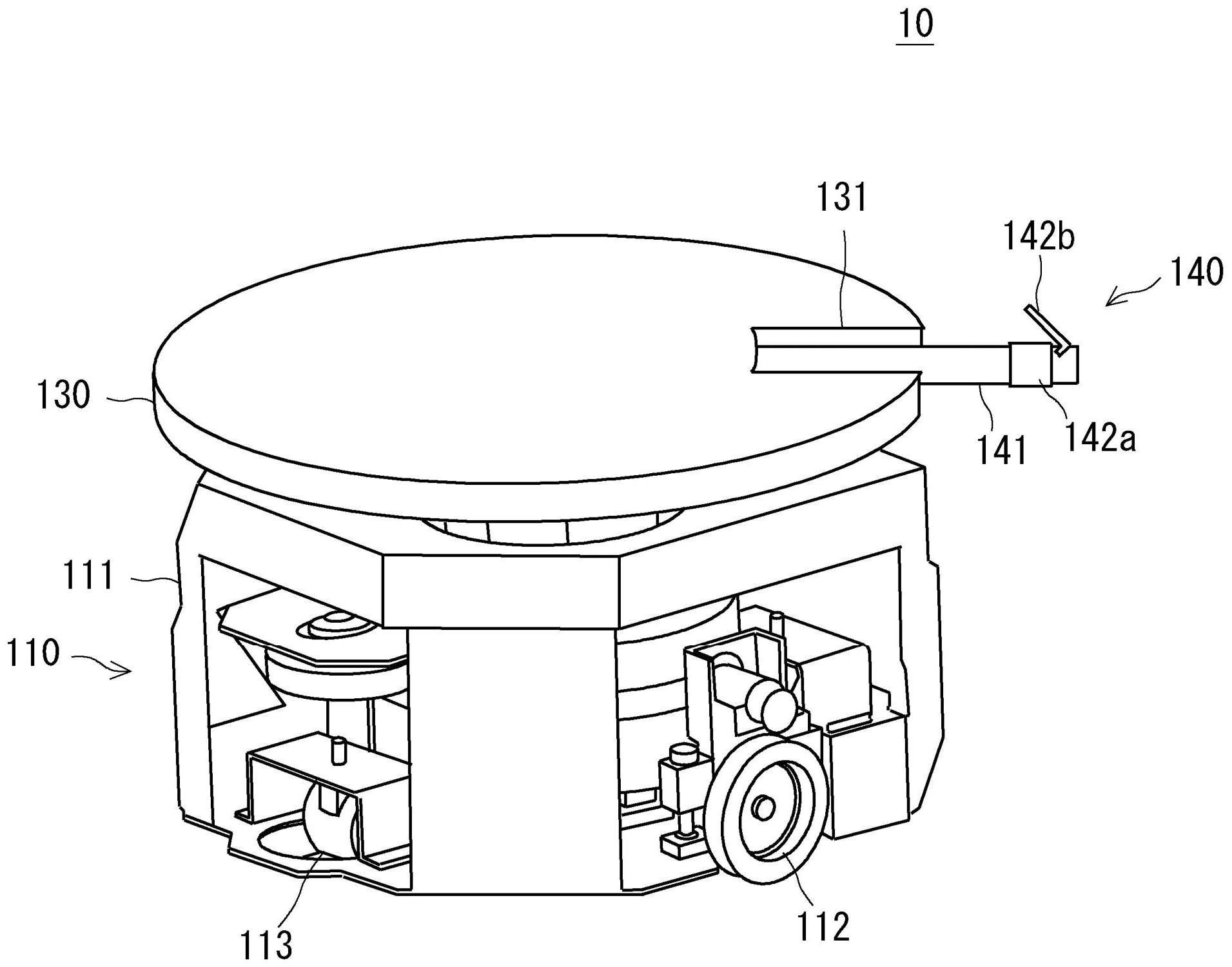
2、用于达成上述目的的本公开的一形态是一种搬运装置,所述搬运装置具有:臂,所述臂能够沿水平方向移动;以及控制部,所述控制部控制所述臂的动作,所述臂具备棘爪,所述控制部使所述臂沿着具备具有卡合部的面的物体的该面移动。
3、根据这样的搬运装置,仅通过使臂移动,就能够将棘爪与物体的卡合部卡合。因此,无需进行用于使臂与物体卡合的准确的对位的控制,就能够容易地使物体移动。
4、在上述一形态中,也可以是,作为所述棘爪,所述臂具备爪的前端朝向所述臂的前方的第一棘爪和爪的前端朝向所述臂的后方的第二棘爪。
5、根据这样的结构,使用第一棘爪而使物体沿第一方向移动,使用第二棘爪而使物体沿第二方向移动。因此,能够使用臂而使物体沿两个方向移动。
6、在上述一形态中,也可以是,所述第一棘爪与所述第二棘爪在所述臂的周向上相互离开地设置,所述控制部使所述臂在该臂的周向上旋转。
7、根据这样的结构,通过使臂旋转,从而对为了使物体移动而利用的棘爪进行切换。因此,便利性提高。
8、在上述一形态中,也可以是,所述第二棘爪相对于所述第一棘爪垂直地设置。
9、根据这样的结构,能够抑制包含两个棘爪的臂整体的上下方向的宽度。因此,容易将臂插入到较窄的间隙。
10、在上述一形态中,也可以是,所述搬运装置具有载置部,所述臂从所述载置部沿水平方向出入,所述棘爪与设置于所述物体的底面的所述卡合部卡合。
11、根据这样的结构,能够使物体向载置部移动或从载置部向外部移动。
12、根据本公开,可以提供无需进行用于使臂与物体卡合的准确的对位的控制就能够容易地使物体移动的搬运装置。
13、本公开的上述及其他目的、特征和优点将从下文给出的详细描述和仅作为示例而给出的附图中得到更充分的理解,因此,不应被认为是对本公开的限制。
技术特征:
1.一种搬运装置,其中,所述搬运装置具有:
2.根据权利要求1所述的搬运装置,其中,
3.根据权利要求2所述的搬运装置,其中,
4.根据权利要求3所述的搬运装置,其中,
5.根据权利要求1~4中任一项所述的搬运装置,其中,
技术总结
本发明提供无需进行用于使臂与物体卡合的准确的对位的控制就能够容易地使物体移动的搬运装置。搬运装置具有:臂,所述臂能够沿水平方向移动;以及控制部,所述控制部控制所述臂的动作,所述臂具备棘爪,所述控制部使所述臂沿着具备具有卡合部的面的物体的该面移动。
技术研发人员:糸泽祐太,岩本国大,古村博隆
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!