一种基于双稳态弹性折纸机构的刚柔耦合机械抓手
本发明属于人工智能机器人相关,更具体地,涉及一种基于双稳态弹性折纸机构的刚柔耦合机械抓手。
背景技术:
1、近年来,有关工业机器人的应用逐渐增加,且随着工业发展,自动化生产是发展趋势,抓取机构在自动化生产中有重要的作用。
2、刚性抓取机构在外部驱动下按预先设定的力或位移抓取物品,其能够输出的力较大且运动更加可控。但当抓取的物品易碎、易变形或形状不固定时,容易对所抓取物品造成不必要的损伤及破坏,或难以适应复杂外形物体。
3、现有柔性抓取机构中,常用的实现柔性的方法包括:使用柔性材料传递外部驱动力,利用柔性材料的形变保护物体与造成一定的适应性;使用欠驱动机构传递外部驱动力,利用其变形特点实现对不同形状与大小的物体的抓取。柔性抓取机构灵活性高,对复杂外形物体适应性强,可更好地实现工件的自动化上下料,但柔性抓取机构的输出力普遍太小并且运动的位置难以准确控制。
4、并且柔性和刚性的方法存在例如这样的缺点:1)需要利用人工或安装传感器的方式判断抓取时机,增加抓取的附加成本;2)在抓取完成后,需要外部驱动持续作用才能提供持续的夹紧力;3)夹取和打开抓夹装置的力大小相同,容易出现夹取时力量过大或是抓夹住物体的力不够。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,解决现有抓手无法简单同时做到自触发的快速夹持、夹持后自锁以及顺应夹持物体的位置偏移、形状与大小的问题。
2、为实现上述目的,按照本发明,提供了一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,该机械抓手包括基座、夹爪、触发网、自锁连接板和自锁扣,其中,
3、所述夹爪设置在所述基座的两侧,用于夹持物体,所述触发绳设置在所述基座的上方,该触发绳的两端分别连接所述一侧的夹爪与另一侧的固定支架上并组合成网状结构,当物体下落接触该触发网时触发所述夹爪合拢夹持物体;
4、所述自锁扣的一端与所述自锁连接板连接,另一端与所述基座连接,所述夹爪合拢时带动所述自锁扣旋转和扭转,当其达到扭转最大形变时释放能量带动所述夹爪实现自锁快速闭合,并在闭合自锁夹紧物体。
5、进一步优选地,所述自锁扣呈c型,其与所述夹爪连接的一端的位置高于与所述基座连接的一端的位置,用于实现扭转。
6、进一步优选地,所述自锁扣为具有韧性的弹簧钢。
7、进一步优选地,所述自锁扣与所述自锁连接板以及所述基座之间通过旋转轴连接,所述自锁扣发生扭转变形时自锁扣绕所述旋转轴转动。
8、进一步优选地,所述基座呈“几”字形,所述夹爪下端连接有侧板,该侧板与底端与所述基座底端连接,当所述自锁扣自锁时,所述侧板紧贴梯形基座的两侧。
9、进一步优选地,所述抓手中还设置有电机和驱动杆,所述电机驱动杆旋转,驱动杆推动自锁扣旋转进而带动所述夹爪打开。
10、进一步优选地,所述夹爪呈弧形,与基座的突起处相对设置。
11、进一步优选地,所述触发绳为一根或者多根。
12、进一步优选地,所述夹爪的两侧设置有固定支架,将所述触发绳连接在所述固定支架和夹爪上形成触发网,使得两侧的夹爪受力均衡,避免单侧夹爪触发。
13、进一步优选地,所述夹爪的中间镂空,镂空处填充有柔性材质,实现与抓夹物体的软接触。
14、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具备下列有益效果:
15、1.本发明弹性折纸机构,其中侧板、夹爪、自锁连接板和自锁扣形成的空间连杆构型具有运动死点赋予抓手夹持后自锁的能力,该空间连杆的构型再结合自锁扣的一定弹性变形能力赋予抓手双稳态运动的特性,进而使其能够快速的抓夹物体且具有自触发的能力;
16、2.本发明提供的自锁功能在抓取和打开时的力不同,在抓取物体时的力是由自锁扣双稳态释放时的能量产生的,这个能量由弹性板的扭转能量及材料的能量密度决定,但是打开时由于机构的死点让自锁扣无法按之前闭合时的扭转形式进行变形而产生较大的抵抗力;
17、3.本发明提供的抓手具有双稳态折叠的特点,在触发机构的配合下,该特点赋予抓手自触发的快速夹持的能力,双稳态就是机构有两个能量较低且能够稳定存在的状态,并且在切换这两个状态时需要对系统做较大的功来越过这两个低能量之间状态的能量壁垒。在越过能量壁垒后,由于能量的快速释放会带来运动速度较快的现象;
18、4.本装置属于三浦折纸机构的一种特殊化的形式,通过将三浦折纸机构的一块刚性部位换成具有韧性的弹性自锁扣,使本装置兼具折纸机构单自由度运动的运动可简单分析性与双稳态自锁的特性。
19、5.本发明采用的夹爪和自锁机构的左右两侧完全对称,在柔性杆件的作用下物体可以在被夹持时偏离机构的对称中心,能顺应夹持物体的位置偏移、形状与大小;
20、6.本发明的自触发的快速夹持、夹持后自锁以及顺应夹持物体的位置偏移、形状与大小这三个特性在一个简单紧凑的机械机构里得到体现,使机构具有较好的可移植性与可靠性。
技术特征:
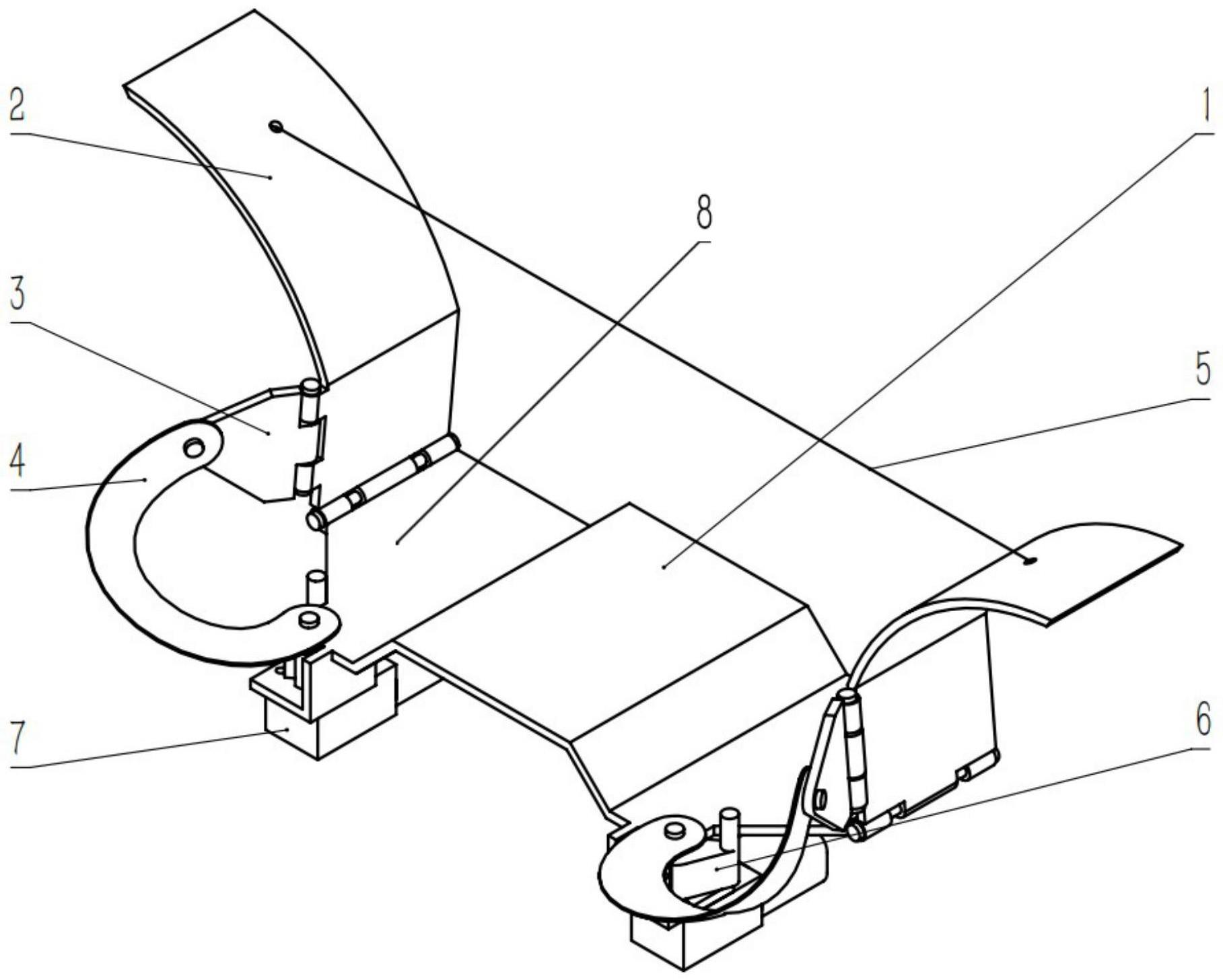
1.一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,该机械抓手包括基座(1)、夹爪(2)、触发绳(5)、自锁扣(4)和自锁连接板(3),其中,
2.如权利要求1所述的一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,所述自锁扣(4)呈c型,其与所述自锁连接板(3)自锁扣(4)连接的一端的位置高于与所述基座(1)连接的一端的位置,并且都是使用旋转轴连接,用于实现扭转及旋转。
3.如权利要求2所述的一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,所述自锁扣(4)为具有韧性的弹簧钢。
4.如权利要求1或2所述的一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,所述自锁扣(4)与夹爪(2)之间通过自锁连接板连接(3),该自锁连接板(3)与所述夹爪用铰链连接与所述基座(1)之间通过旋转轴连接,所述自锁扣发生扭转变形时该自锁连接板绕所述旋转轴转动并且发生扭转变形。
5.如权利要求4所述的一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,所述基座(1)呈“几”字型,所述夹爪(2)下端连接有侧板(8),该侧板与底端与所述基座底端连接,当所述自锁扣自锁时,所述侧板紧贴梯形基座的两侧。
6.如权利要求4所述的一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,所述机械抓手中还设置有电机(7)和驱动杆(6),所述电机驱动杆(6)旋转,驱动杆推动自锁扣旋转进而带动所述夹爪打开。
7.如权利要求1所述的一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,所述夹爪(2)的上部呈弧形,与基座的突起处相对设置。
8.如权利要求7所述的一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,所述触发绳(5)为一根或者多根。
9.如权利要求8所述的一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,所述夹爪(2)的两侧设置有固定支架,将所述触发绳(5)连接在所述固定支架和夹爪上形成触发网,使得两侧的夹爪受力均衡,避免单侧夹爪触发。
10.如权利要求9所述的一种基于双稳态弹性折纸机构的刚柔耦合机械抓手,其特征在于,所述夹爪(2)的中间镂空,镂空处填充有柔性材质,实现与抓夹物体的软接触。
技术总结
本发明属于人工智能机器人相关技术领域,并公开了一种基于双稳态弹性折纸机构的刚柔耦合机械抓手。该机械抓手包括基座、夹爪、触发绳、自锁扣和自锁连接板,所述夹爪用于夹持物体,所述触发绳的两端分别连接所述基座两侧的夹爪上,当物体下落接触该触发绳时触发所述夹爪合拢夹持物体;所述自锁扣的一端与所述自锁连接板连接,另一端与所述基座连接,所述夹爪被触发后带动所述自锁扣旋转和扭转,当自锁扣达到最大形变时所述自锁扣释放能量并带动夹爪快速闭合,在闭合后由机构特点实现自锁夹紧物体。通过本发明,解决现有抓手无法简单同时做到自触发的快速夹持、夹持后自锁以及顺应夹持物体的位置偏移、形状与大小的问题。
技术研发人员:吴志刚,杨箫,夏志生,朱嘉淇
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!