基于纤维阻塞的变刚度气线混合软体驱动器
本发明属于软体机器人,具体涉及一种基于纤维阻塞的变刚度气线混合驱动软体驱动器,其在探索救援、物体抓取等领域均表现出广泛的应用前景,适用于抓取外形复杂、表面柔软、易于破损的物体,还可以用于软体机械臂的弯曲及刚度变化等情况。
背景技术:
1、随着机器人的用途越来越广泛,在人们生产生活中扮演着越来越重要的角色,这便使得一些特殊场合对机器人结构的灵活性以及柔顺性提出了更高的要求,这也就导致传统的刚性机器人在一些特殊场合下并不适用,例如:探索救援、柔软物体的抓取等情形。随着材料的不断发展,结合仿生学的相关知识,一种新型的以软材料为主的软体机器人的概念逐渐被提出来。
2、软体机器人主要以柔软的功能材料为主体制作而成,因其具有多样的运动自由度和良好的环境适应性,进而在探索救援和柔软物体的抓取等情况下有很大的应用前景,但由于软体机器人本身低刚度的特性导致了其承载能力和输出力受到很大的限制,难以完成在负载下进行作业,而且还伴随了很大的运动不确定性。因而越来越多的科研机构开始针对软体机器人变刚度的技术进行研究。
3、现有的软体机器人变刚度技术主要包括:静电吸附变刚度技术、静电层聚密变刚度技术、pvc凝胶便刚度技术、折纸变刚度技术、最小势能变刚度技术、磁/电流变变刚度技术、主动/半主动拮抗机制变刚度技术、堵塞作用变刚度技术。上述的软体机器人变刚度技术中如静电吸附和静电层聚密需要连接千伏级的工作电压,而且在工作时还会产生残余的静电,不适合实际场合中应用;pvc凝胶本身的刚度就比较大,在一些柔软结构中会受到一定的限制;折纸技术和最小势能技术虽然变刚度的效果较好,但是目前还处于实验阶段,在实际生产生活中应用还有待研究;磁/电流变技术虽然变刚度的效果显著,但其稳定性较差、响应较慢,且在实际生产过程中的成品率较低;主动/半主动拮抗技术和堵塞作用变刚度技术灵活性好也较为安全,适合实际生产生活中应用。英国索尔福德大学利用半主动拮抗机制变刚度技术制作出多个驱动器单元,虽然反应迅速、灵活性好,但是自由度很大难以控制。浙江大学流体动力与机电系统国家重点实验室利用堵塞变刚度技术制作出软体驱动器,通过在内部填充颗粒使得该驱动器在外界压强的作用下引起颗粒间摩擦力显著增大,从而达到变刚度的目的,然而颗粒填充会导致该软体驱动器重量增大,受到剪切破坏后细小颗粒容易泄露导致该驱动器无法正常工作,但如果用编制纤维来代替颗粒填充,那么就可以解决上述颗粒阻塞所引起的一些弊端。
4、现有的软体驱动器的驱动方式有线绳驱动、气压驱动、形状记忆材料驱动、电活性聚合物驱动、磁驱动、响应性凝胶驱动、化学驱动、生物驱动、混合驱动。虽然每种驱动方式都有各自的优缺点,但目前最常用的驱动方式就是气压驱动以及线绳驱动,这两种驱动方式都可以提供很大的驱动力、控制精准、驱动材料易于获取、无毒无害而且结构简单、成本较低,适合用于软体机械臂、探索救援、医疗手术、物体抓取以及仿生运动等领域。随着对软体驱动器的不断研究,为了尽量减小某种驱动方式所带来的弊端,便产生了一种新型的驱动方式,即混合驱动,这种驱动方式的最大优势就在于,通过将多种不同的驱动方式结合起来进而相互弥补。苏州大学所研发的虎甲幼虫多驱动软体机器人,头部采用了sma弹簧驱动实现咬合运动,尾部则采用气压驱动实现前进和转向运动。
5、能够用于探索救援、物体抓取等领域的软体驱动器需要满足两个基本的功能,首先可以在较低刚度的状态下进行可控弯曲变形,其次可以在较高的刚度状态下稳定形状和负载工作。
技术实现思路
1、针对现有技术的不足,本发明拟解决的技术问题是,提供一种基于纤维阻塞的变刚度气线混合软体驱动器,该驱动器具有刚度可变、可控弯曲变形、输出力大、响应速度快等优点。
2、本发明解决所述技术问题采用的技术方案如下:
3、一种基于纤维阻塞的变刚度气线混合软体驱动器,其特征在于,该驱动器包括变刚度部分和驱动部分,变刚度部分位于驱动部分的上端,变刚度部分通过纤维阻塞实现驱动器的刚度变化,驱动部分通过线绳驱动实现驱动器的弯曲;
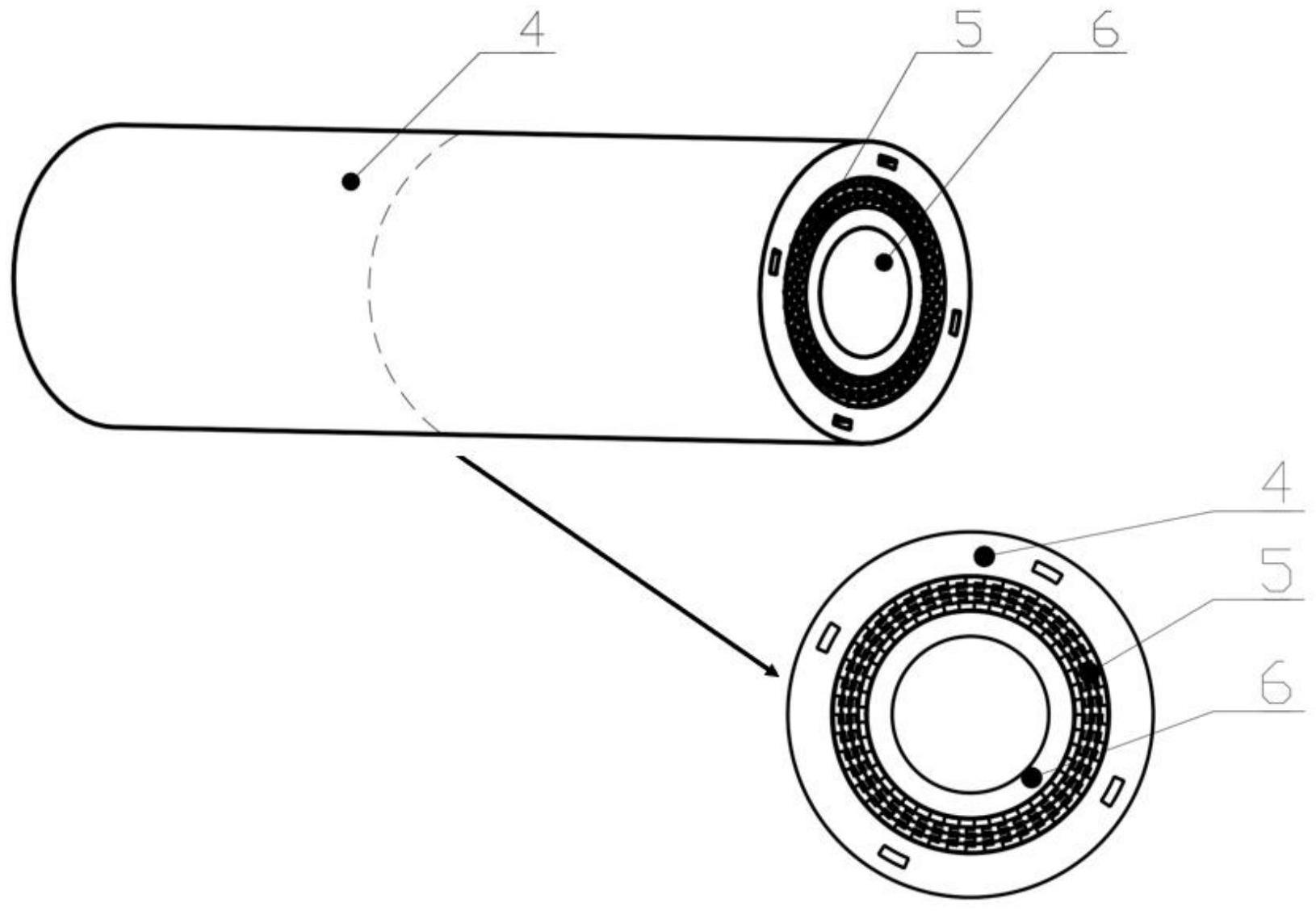
4、所述变刚度部分包括外层管、纤维阻塞层和内层管,纤维阻塞层位于外层管和内层管之间;其中,纤维阻塞层包括大纤维层和小纤维层,多个大纤维层堆叠在一起,相邻两个大纤维层的纤维旋向相反,相邻两个大纤维层的间隙内填充两个小纤维层,每个小纤维层的纤维旋向与邻近的大纤维层的纤维旋向相同。
5、进一步的,所述大纤维层和小纤维层均由多根旋向相同且与水平方向呈30°夹角的纤维阵列而成,相邻两根纤维之间存在间隙,此间隙为小纤维层的纤维直径的1/5。
6、进一步的,所述外层管和内层管均为硅胶软管。
7、与现有技术相比,本发明具有如下优点和有益效果:
8、1.本发明设计的软体驱动器,变刚度部分采用了纤维阻塞变刚度结构,与传统的颗粒阻塞变刚度软体驱动器相比,纤维阻塞层具有重量轻,刚度变化范围大,不易受损失效等优势。
9、2.本发明设计的软体驱动器,设计了纤维阻塞层中的螺旋纤维的排布和结构,相比于以往传统的软体驱动器,该结构有益于增强软体驱动器抵抗剪切应力的能力,还具有一定程度抵抗拉伸断裂的能力。
10、3.本发明设计的软体驱动器,设计的驱动结构包含了线绳驱动和气压驱动,通过线绳驱动控制软体驱动器的弯曲变形,线绳驱动弯曲更加精准可控且反应灵敏。通过气压控制纤维阻塞层的气压变化,使得径向压缩更加均匀可控。相比于传统的单一驱动器,利用线绳和气压混合驱动可以更好地相互弥补不足,使得驱动器工作更加精准可控。
技术特征:
1.一种基于纤维阻塞的变刚度气线混合软体驱动器,其特征在于,该驱动器包括变刚度部分和驱动部分,变刚度部分位于驱动部分的上端,变刚度部分通过纤维阻塞实现驱动器的刚度变化,驱动部分通过线绳驱动实现驱动器的弯曲;
2.根据权利要求1所述的基于纤维阻塞的变刚度气线混合软体驱动器,其特征在于,所述大纤维层和小纤维层均由多根旋向相同且与水平方向呈30°夹角的纤维阵列而成,相邻两根纤维之间存在间隙,此间隙为小纤维层的纤维直径的1/5。
3.根据权利要求1或2所述的基于纤维阻塞的变刚度气线混合软体驱动器,其特征在于,所述外层管和内层管均为硅胶软管。
技术总结
本发明为一种基于纤维阻塞的变刚度气线混合软体驱动器,包括变刚度部分和驱动部分,变刚度部分位于驱动部分的上端,变刚度部分通过纤维阻塞实现驱动器的刚度变化,驱动部分通过线绳驱动实现驱动器的弯曲;所述变刚度部分包括外层管、纤维阻塞层和内层管,纤维阻塞层位于外层管和内层管之间;其中,纤维阻塞层包括大纤维层和小纤维层,多个大纤维层堆叠在一起,相邻两个大纤维层的纤维旋向相反,相邻两个大纤维层的间隙内填充两个小纤维层,每个小纤维层的纤维旋向与邻近的大纤维层的纤维旋向相同。该驱动器具有刚度可变、可控弯曲变形、输出力大、响应速度快等优点。
技术研发人员:王梦校,刘璇,慈立伟,王辉,彭冉
受保护的技术使用者:河北工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!